DEFINICIÓN
equilibrio sostenible- se trata de un equilibrio en el que el cuerpo, sacado del equilibrio y abandonado a sí mismo, vuelve a su posición anterior.
Esto ocurre si, con un ligero desplazamiento del cuerpo en cualquier dirección desde la posición inicial, la resultante de las fuerzas que actúan sobre el cuerpo se vuelve distinta de cero y se dirige hacia la posición de equilibrio. Por ejemplo, una pelota que se encuentra en el fondo de una cavidad esférica (Fig. 1a).
DEFINICIÓN
Equilibrio inestable- se trata de un equilibrio en el que el cuerpo, sacado de la posición de equilibrio y abandonado a sí mismo, se desviará aún más de la posición de equilibrio.
En este caso, con un pequeño desplazamiento del cuerpo desde la posición de equilibrio, la resultante de las fuerzas que se le aplican es distinta de cero y está dirigida desde la posición de equilibrio. Un ejemplo es una pelota ubicada en la parte superior de una superficie esférica convexa (Fig. 1 b).
DEFINICIÓN
Equilibrio indiferente- este es un equilibrio en el que el cuerpo, sacado del equilibrio y abandonado a sí mismo, no cambia su posición (estado).
En este caso, con pequeños desplazamientos del cuerpo desde su posición original, la resultante de las fuerzas aplicadas al cuerpo permanece igual a cero. Por ejemplo, una pelota sobre una superficie plana (Fig. 1, c).
Figura 1. Diferentes tipos de equilibrio del cuerpo sobre un soporte: a) equilibrio estable; b) equilibrio inestable; c) equilibrio indiferente.
Equilibrio estático y dinámico de los cuerpos.
Si como resultado de la acción de las fuerzas el cuerpo no recibe aceleración, puede estar en reposo o moverse uniformemente en línea recta. Por lo tanto, podemos hablar de equilibrio estático y dinámico.
DEFINICIÓN
Equilibrio estático- este es un equilibrio de este tipo cuando, bajo la acción de fuerzas aplicadas, el cuerpo está en reposo.
balance dinámico- este es tal equilibrio cuando, bajo la acción de fuerzas, el cuerpo no cambia su movimiento.
En estado de equilibrio estático se encuentra una linterna suspendida sobre cables, en cualquier estructura de edificio. Como ejemplo de equilibrio dinámico, podemos considerar una rueda que rueda sobre una superficie plana en ausencia de fuerzas de fricción.
De ello se deduce que si la suma geométrica de todos Fuerzas externas aplicado al cuerpo es igual a cero, entonces el cuerpo está en reposo o realiza un movimiento rectilíneo uniforme. En este caso, se acostumbra decir que las fuerzas aplicadas al cuerpo se equilibran entre sí. Al calcular la resultante, todas las fuerzas que actúan sobre el cuerpo se pueden aplicar al centro de masa.
Para que un cuerpo que no gira esté en equilibrio, es necesario que la resultante de todas las fuerzas aplicadas al cuerpo sea igual a cero.
$(\overrightarrow(F))=(\overrightarrow(F_1))+(\overrightarrow(F_2))+...= 0$
Si un cuerpo puede girar alrededor de algún eje, entonces para su equilibrio no es suficiente que la resultante de todas las fuerzas sea igual a cero.
La acción de rotación de una fuerza depende no solo de su magnitud, sino también de la distancia entre la línea de acción de la fuerza y el eje de rotación.
La longitud de la perpendicular trazada desde el eje de rotación hasta la línea de acción de la fuerza se llama brazo de la fuerza.
El producto del módulo de fuerza $F$ y el brazo d se denomina momento de fuerza M. Los momentos de aquellas fuerzas que tienden a girar el cuerpo en sentido antihorario se consideran positivos.
La regla de los momentos: un cuerpo con un eje de rotación fijo está en equilibrio si la suma algebraica de los momentos de todas las fuerzas aplicadas al cuerpo alrededor de este eje es cero:
En el caso general, cuando un cuerpo puede moverse en traslación y rotar, ambas condiciones deben cumplirse para el equilibrio: la fuerza resultante debe ser igual a cero y la suma de todos los momentos de las fuerzas debe ser igual a cero. Ambas condiciones no son suficientes para el descanso.
Figura 1. Equilibrio indiferente. Rueda rodando sobre una superficie horizontal. La fuerza resultante y el momento de las fuerzas son iguales a cero.
Una rueda que rueda sobre una superficie horizontal es un ejemplo de equilibrio indiferente (Fig. 1). Si la rueda se detiene en cualquier punto, estará en equilibrio. Junto con el equilibrio indiferente en mecánica, se distinguen estados de equilibrio estable e inestable.
Se dice que un estado de equilibrio es estable si, con pequeñas desviaciones del cuerpo de este estado, surgen fuerzas o momentos de fuerzas que tienden a devolver el cuerpo a un estado de equilibrio.
Con una pequeña desviación del cuerpo del estado de equilibrio inestable, surgen fuerzas o momentos de fuerzas que tienden a sacar el cuerpo de la posición de equilibrio. Una pelota que descansa sobre una superficie plana horizontal se encuentra en un estado de equilibrio indiferente.

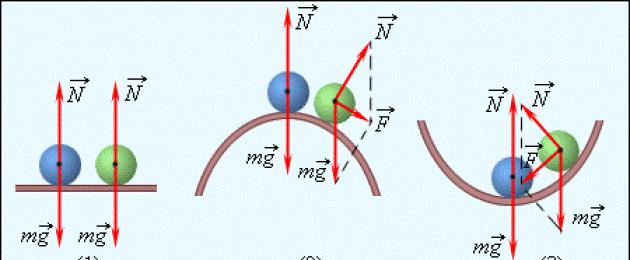
Figura 2. Diferentes tipos de equilibrio de una pelota sobre un soporte. (1) -- equilibrio indiferente, (2) -- equilibrio inestable, (3) -- equilibrio estable
Una pelota ubicada en la parte superior de una repisa esférica es un ejemplo de un equilibrio inestable. Finalmente, la bola en el fondo de la cavidad esférica se encuentra en un estado de equilibrio estable (Fig. 2).
Para un cuerpo con un eje de rotación fijo, son posibles los tres tipos de equilibrio. El equilibrio indiferente ocurre cuando el eje de rotación pasa por el centro de masa. En equilibrio estable e inestable, el centro de masa está en una línea vertical que pasa por el eje de rotación. En este caso, si el centro de masa está por debajo del eje de rotación, el estado de equilibrio es estable. Si el centro de masas se encuentra por encima del eje, el estado de equilibrio es inestable (Fig. 3).

Figura 3. Equilibrio estable (1) e inestable (2) de un disco circular homogéneo fijado en el eje O; el punto C es el centro de masa del disco; $(\overrightarrow(F))_t\ $-- gravedad; $(\overrightarrow(F))_(y\ )$-- fuerza elástica del eje; d -- hombro
Un caso especial es el equilibrio de un cuerpo sobre un soporte. En este caso, la fuerza elástica del soporte no se aplica en un punto, sino que se distribuye por la base del cuerpo. El cuerpo está en equilibrio si una línea vertical trazada por el centro de masa del cuerpo pasa por el área de apoyo, es decir, dentro del contorno formado por las líneas que conectan los puntos de apoyo. Si esta línea no cruza la zona de apoyo, entonces el cuerpo vuelca.
Tarea 1
El plano inclinado está inclinado en un ángulo de 30o con respecto al horizonte (Fig. 4). Sobre él hay un cuerpo P cuya masa es m=2 kg. La fricción se puede despreciar. El hilo lanzado sobre el bloque forma un ángulo de 45o con el plano inclinado. ¿A qué peso de la carga Q estará el cuerpo P en equilibrio?

Figura 4
El cuerpo está bajo la acción de tres fuerzas: la fuerza de la gravedad P, la tensión del hilo con la carga Q y la fuerza elástica F del lado del plano que lo presiona en la dirección perpendicular al plano. Descompongamos la fuerza Р en componentes: $\overrightarrow(Р)=(\overrightarrow(Р))_1+(\overrightarrow(Р))_2$. Condición $(\overrightarrow(P))_2=$ Para el equilibrio, teniendo en cuenta la duplicación del esfuerzo del bloque en movimiento, es necesario que $\overrightarrow(Q)=-(2\overrightarrow(P))_1$. Por lo tanto, la condición de equilibrio: $m_Q=2m(sin \widehat((\overrightarrow(P))_1(\overrightarrow(P))_2)\ )$. Sustituyendo los valores, obtenemos: $m_Q=2\cdot 2(sin \left(90()^\circ -30()^\circ -45()^\circ \right)\ )=1.035\ kg$.
En el viento, el globo atado cuelga sobre un punto diferente de la Tierra, al que se une el cable (Fig. 5). La tensión del cable es de 200 kg, el ángulo con la vertical es a=30$()^\circ$. ¿Cuál es la fuerza de la presión del viento?
\[(\overrightarrow(F))_in=-(\overrightarrow(T))_1;\ \ \ \ \left|(\overrightarrow(F))_in\right|=\left|(\overrightarrow(T)) _1\right|=Tg(sin (\mathbf \alpha )\ )\] \[\left|(\overrightarrow(F))_in\right|=\ 200\cdot 9.81\cdot (sin 30()^\circ \ )=981\N\]

Esta conferencia cubre las siguientes preguntas:
1. Condiciones para el equilibrio de los sistemas mecánicos.
2. Estabilidad del equilibrio.
3. Un ejemplo de determinación de posiciones de equilibrio y estudio de su estabilidad.
El estudio de estos temas es necesario para estudiar los movimientos oscilatorios de un sistema mecánico relativo a la posición de equilibrio en la disciplina "Partes de Máquinas", para resolver problemas en las disciplinas "Teoría de Máquinas y Mecanismos" y "Resistencia de Materiales".
Un caso importante de movimiento de los sistemas mecánicos es su movimiento oscilatorio. Las oscilaciones son movimientos repetidos de un sistema mecánico con respecto a alguna de sus posiciones, que ocurren con mayor o menor regularidad en el tiempo. El trabajo del curso considera el movimiento oscilatorio de un sistema mecánico en relación con la posición de equilibrio (relativa o absoluta).
Un sistema mecánico puede oscilar durante un período de tiempo suficientemente largo solo cerca de una posición de equilibrio estable. Por tanto, antes de compilar las ecuaciones del movimiento oscilatorio, es necesario encontrar las posiciones de equilibrio e investigar su estabilidad.
Condiciones de equilibrio para sistemas mecánicos.
Según el principio posibles movimientos(la ecuación básica de la estática), para que un sistema mecánico, en el que se imponen restricciones ideales, estacionarias, de confinamiento y holonómicas, esté en equilibrio, es necesario y suficiente que todas las fuerzas generalizadas en este sistema sean iguales a cero:
donde es la fuerza generalizada correspondiente a j- oh coordenada generalizada;
s- el número de coordenadas generalizadas en el sistema mecánico.
Si se compilaron ecuaciones diferenciales de movimiento para el sistema en estudio en forma de ecuaciones de Lagrange de segundo tipo, entonces para determinar las posibles posiciones de equilibrio, es suficiente igualar las fuerzas generalizadas a cero y resolver las ecuaciones resultantes con respecto a las coordenadas generalizadas.
Si el sistema mecánico está en equilibrio en un campo de fuerza potencial, entonces de las ecuaciones (1) obtenemos las siguientes condiciones de equilibrio:
Por tanto, en la posición de equilibrio, la energía potencial tiene un valor extremo. No todos los equilibrios definidos por las fórmulas anteriores se pueden realizar en la práctica. Dependiendo del comportamiento del sistema al desviarse de la posición de equilibrio, se habla de estabilidad o inestabilidad de esta posición.
Estabilidad del equilibrio
La definición del concepto de estabilidad de una posición de equilibrio se dio a fines del siglo XIX en los trabajos del científico ruso A. M. Lyapunov. Veamos esta definición.
Para simplificar los cálculos, estaremos más de acuerdo en las coordenadas generalizadas q 1 , q 2 ,...,q s contar desde la posición de equilibrio del sistema:
donde
Una posición de equilibrio se llama estable si para cualquier número arbitrariamente pequeñopuedes buscar otro numero , que en el caso de que los valores iniciales de las coordenadas y velocidades generalizadas no superen:
los valores de coordenadas y velocidades generalizadas durante el movimiento adicional del sistema no excederán .
En otras palabras, la posición de equilibrio del sistema q 1 = q 2 = ...= q s= 0 se llama sostenible, si siempre es posible encontrar valores iniciales suficientemente pequeños, en el que el movimiento del sistemano dejará ninguna vecindad dada arbitrariamente pequeña de la posición de equilibrio. Para un sistema con un grado de libertad, el movimiento estable del sistema se puede visualizar en el plano de fase (Fig. 1).Para una posición de equilibrio estable, el movimiento del punto representativo, comenzando en la región [ ] , no irá más allá del área en el futuro.

Figura 1
La posición de equilibrio se llama asintóticamente estable , si con el tiempo el sistema se acercará a la posición de equilibrio, es decir
Determinar las condiciones para la estabilidad de una posición de equilibrio es una tarea bastante difícil, por lo que nos restringimos al caso más simple: el estudio de la estabilidad del equilibrio de sistemas conservativos.
Las condiciones suficientes para la estabilidad de las posiciones de equilibrio para tales sistemas están definidas por Lagrange - Teorema de Dirichlet : la posición de equilibrio de un sistema mecánico conservativo es estable si, en la posición de equilibrio, la energía potencial del sistema tiene un mínimo aislado .
La energía potencial de un sistema mecánico se determina hasta una constante. Elegimos esta constante para que en la posición de equilibrio energía potencial era igual a cero:
P(0)=0.
Entonces, para un sistema con un grado de libertad, una condición suficiente para la existencia de un mínimo aislado, junto con la condición necesaria (2), es la condición
Como en la posición de equilibrio la energía potencial tiene un mínimo aislado y P(0)=0 , entonces en alguna vecindad finita de esta posición
П(q)=0.
Las funciones que tienen un signo constante y son iguales a cero solo cuando todos sus argumentos son cero se llaman signo definido. Por tanto, para que la posición de equilibrio de un sistema mecánico sea estable, es necesario y suficiente que, en las proximidades de esta posición, la energía potencial sea una función definida positivamente de coordenadas generalizadas.
Para sistemas lineales y para sistemas que pueden reducirse a lineales para pequeñas desviaciones de la posición de equilibrio (linealizados), la energía potencial puede representarse como una forma cuadrática de coordenadas generalizadas

donde - coeficientes de rigidez generalizados.
Coeficientes generalizadosson números constantes que se pueden determinar directamente a partir de la expansión de la energía potencial en serie o a partir de los valores de las segundas derivadas de la energía potencial con respecto a las coordenadas generalizadas en la posición de equilibrio:
De la fórmula (4) se deduce que los coeficientes de rigidez generalizados son simétricos con respecto a los índices
Para eso , para satisfacer condiciones suficientes para la estabilidad de la posición de equilibrio, la energía potencial debe ser una forma cuadrática definida positiva de sus coordenadas generalizadas.
En matemáticas hay criterio de Silvestre , que da las condiciones necesarias y suficientes para la definición positiva de las formas cuadráticas: la forma cuadrática (3) será positiva definida si el determinante compuesto por sus coeficientes y todos sus principales diagonales menores son positivos, es decir si los coeficientes satisfará las condiciones
![]()
.....

En particular, para sistema lineal con dos grados de libertad, la energía potencial y las condiciones del criterio de Sylvester tendrán la forma
De manera similar, se pueden estudiar las posiciones de equilibrio relativo si, en lugar de la energía potencial, se tiene en cuenta la energía potencial del sistema reducido.
PAGS Un ejemplo de determinación de posiciones de equilibrio y estudio de su estabilidad.

Figura 2
Considerar sistema mecánico que consiste en un tubo AB, que es el pivote OO 1 conectada al eje horizontal de rotación, y una bola que se mueve a través del tubo sin fricción y está conectada a un punto A tubos con un resorte (Fig. 2). Determinemos las posiciones de equilibrio del sistema y evaluemos su estabilidad para los siguientes parámetros: longitud del tubo l 2 = 1 metro , longitud de la barra 1 = 0,5 metro . longitud de resorte sin deformar yo 0 = 0,6 m, tasa de resorte C= 100 N/m. peso del tubo metro 2 = 2 kg, varilla - metro 1 = 1 kg y pelota - metro 3 = 0,5 kg. Distancia OA es igual yo 3 = 0,4 m.
Escribamos una expresión para la energía potencial del sistema bajo consideración. Consiste en la energía potencial de tres cuerpos en un campo de gravedad uniforme y la energía potencial de un resorte deformado.
La energía potencial de un cuerpo en el campo de gravedad es igual al producto del peso del cuerpo por la altura de su centro de gravedad sobre el plano en el que la energía potencial se considera nula. Sea cero la energía potencial en el plano que pasa por el eje de rotación de la barra OO 1 , entonces por gravedad
Para la fuerza elástica, la energía potencial está determinada por la cantidad de deformación
![]()
Encontremos las posibles posiciones de equilibrio del sistema. Los valores de coordenadas en las posiciones de equilibrio son las raíces del siguiente sistema de ecuaciones.

Se puede compilar un sistema similar de ecuaciones para cualquier sistema mecánico con dos grados de libertad. En algunos casos, es posible obtener una solución exacta del sistema. Para el sistema (5), tal solución no existe, por lo que las raíces deben buscarse utilizando métodos numéricos.
Resolviendo el sistema de ecuaciones trascendentales (5), obtenemos dos posibles posiciones de equilibrio:
Para evaluar la estabilidad de las posiciones de equilibrio obtenidas, encontramos todas las segundas derivadas de la energía potencial con respecto a las coordenadas generalizadas y determinamos los coeficientes de rigidez generalizados a partir de ellas.
![]()
Un cuerpo está en reposo (o se mueve uniformemente y en línea recta) si la suma vectorial de todas las fuerzas que actúan sobre él es cero. Se dice que las fuerzas se equilibran entre sí. Cuando se trata de un cuerpo de cierta forma geométrica, al calcular la fuerza resultante, todas las fuerzas se pueden aplicar al centro de masa del cuerpo.
La condición para el equilibrio de los cuerpos.
Para que un cuerpo que no gira esté en equilibrio es necesario que la resultante de todas las fuerzas que actúan sobre él sea igual a cero.
F → = F 1 → + F 2 → + . . + F norte → = 0 .
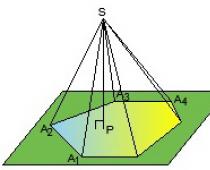
La figura anterior muestra el saldo cuerpo solido. El bloque se encuentra en estado de equilibrio bajo la acción de tres fuerzas que actúan sobre él. Las líneas de acción de las fuerzas F 1 → y F 2 → se cortan en el punto O. El punto de aplicación de la gravedad es el centro de masa del cuerpo C. Estos puntos se encuentran en una línea recta, y al calcular la fuerza resultante F 1 → , F 2 → y m g → se reducen al punto C .
La condición de que la resultante de todas las fuerzas sea igual a cero no es suficiente si el cuerpo puede girar alrededor de algún eje.
El hombro de la fuerza d es la longitud de la perpendicular trazada desde la línea de acción de la fuerza hasta el punto de su aplicación. El momento de la fuerza M es el producto del brazo de la fuerza y su módulo.
El momento de la fuerza tiende a girar el cuerpo alrededor de su eje. Aquellos momentos que giran el cuerpo en sentido antihorario se consideran positivos. La unidad de medida del momento de fuerza en sistema internacional C - 1 N m e t r.
Definición. regla del momento
Si la suma algebraica de todos los momentos aplicados al cuerpo con respecto al eje fijo de rotación es igual a cero, entonces el cuerpo está en equilibrio.
M1 + M2 + . . + METRO norte = 0

¡Importante!
En el caso general, para el equilibrio de los cuerpos se deben cumplir dos condiciones: la fuerza resultante es igual a cero y se observa la regla de los momentos.
Hay diferentes tipos de equilibrio en la mecánica. Así, se hace una distinción entre estable e inestable, así como equilibrio indiferente.

Un ejemplo típico de equilibrio indiferente es una rueda (o bola) rodante que, si se detiene en cualquier punto, estará en estado de equilibrio.
El equilibrio estable es tal equilibrio de un cuerpo cuando, con sus pequeñas desviaciones, surgen fuerzas o momentos de fuerzas que tienden a devolver el cuerpo a un estado de equilibrio.
Equilibrio inestable: un estado de equilibrio, con una pequeña desviación a partir del cual las fuerzas y los momentos de las fuerzas tienden a desequilibrar aún más el cuerpo.

En la figura anterior, la posición de la pelota es (1) - equilibrio indiferente, (2) - equilibrio inestable, (3) - equilibrio estable.
cuerpo con eje fijo la rotación puede estar en cualquiera de las posiciones de equilibrio descritas. Si el eje de rotación pasa por el centro de masas, hay un equilibrio indiferente. En equilibrio estable e inestable, el centro de masa está ubicado en una línea vertical que pasa por el eje de rotación. Cuando el centro de masa está debajo del eje de rotación, el equilibrio es estable. De lo contrario, viceversa.

Un caso especial de equilibrio es el equilibrio de un cuerpo sobre un soporte. En este caso, la fuerza elástica se distribuye por toda la base del cuerpo y no pasa por un punto. Un cuerpo está en reposo en equilibrio cuando una línea vertical trazada por el centro de masa corta el área de apoyo. De lo contrario, si la línea del centro de masa no cae en el contorno formado por las líneas que conectan los puntos de apoyo, el cuerpo vuelca.
Un ejemplo del equilibrio de un cuerpo sobre un soporte es la famosa Torre Inclinada de Pisa. Según la leyenda, Galileo Galilei dejó caer bolas cuando realizó sus experimentos para estudiar caida libre teléfono

Una línea trazada desde el centro de masa de la torre corta la base aproximadamente a 2,3 m de su centro.
Si nota un error en el texto, resáltelo y presione Ctrl+Enter
Clase: 10
Presentación para la lección






























 De vuelta atras
De vuelta atras
¡Atención! La vista previa de la diapositiva es solo para fines informativos y es posible que no represente la extensión total de la presentación. Si está interesado en este trabajo, descargue la versión completa.
Objetivos de la lección: Estudiar el estado de equilibrio de los cuerpos, familiarizarse con varios tipos de equilibrio; averiguar las condiciones bajo las cuales el cuerpo está en equilibrio.
Objetivos de la lección:
- Capacitación: Estudiar dos condiciones de equilibrio, tipos de equilibrio (estable, inestable, indiferente). Averigüe en qué condiciones los cuerpos son más estables.
- Desarrollando: Fomentar el desarrollo del interés cognitivo por la física. Desarrollo de habilidades para comparar, generalizar, resaltar lo principal, sacar conclusiones.
- Educativo: Cultivar la atención, la capacidad de expresar el punto de vista y defenderlo, desarrollar las habilidades comunicativas de los alumnos.
Tipo de lección: lección aprendiendo material nuevo con soporte informático.
Equipo:
- Disco "Trabajo y potencia" de "Lecciones y pruebas electrónicas.
- Tabla "Condiciones de equilibrio".
- Prisma inclinado con una plomada.
- Cuerpos geométricos: cilindro, cubo, cono, etc.
- Ordenador, proyector multimedia, pizarra o pantalla interactiva.
- Presentación.
durante las clases
Hoy en la lección aprenderemos por qué la grúa no se cae, por qué el juguete Roly-Vstanka siempre vuelve a su estado original, ¿por qué la Torre Inclinada de Pisa no se cae?
I. Repetición y actualización de conocimientos.
- Formule la primera ley de Newton. ¿Cuál es el estado de la ley?
- ¿Qué pregunta responde la segunda ley de Newton? Fórmula y redacción.
- ¿Qué pregunta responde la tercera ley de Newton? Fórmula y redacción.
- ¿Cuál es la fuerza resultante? ¿Como es ella?
- Del disco "Movimiento e interacción de cuerpos" complete la tarea No. 9 "La resultante de fuerzas con diferentes direcciones" (la regla de la suma de vectores (2, 3 ejercicios)).
II. Aprendiendo material nuevo.
1. ¿A qué se llama equilibrio?
El equilibrio es un estado de reposo.
2. Condiciones de equilibrio.(diapositiva 2)
a) ¿Cuándo está el cuerpo en reposo? ¿De qué ley proviene esto?
La primera condición de equilibrio: Un cuerpo está en equilibrio si la suma geométrica de las fuerzas externas aplicadas al cuerpo es cero. ∑ F = 0
b) Deje que dos fuerzas iguales actúen sobre el tablero, como se muestra en la figura.

¿Estará en equilibrio? (No, ella se volverá)
En reposo es sólo punto central y el resto se mueve. Esto significa que para que el cuerpo esté en equilibrio es necesario que la suma de todas las fuerzas que actúan sobre cada elemento sea igual a 0.
La segunda condición de equilibrio: La suma de los momentos de las fuerzas que actúan en el sentido de las agujas del reloj debe ser igual a la suma de los momentos de las fuerzas que actúan en el sentido contrario a las agujas del reloj.
∑ M en el sentido de las agujas del reloj = ∑ M en el sentido contrario a las agujas del reloj
Momento de fuerza: M = F L
L - hombro de fuerza - la distancia más corta desde el punto de apoyo hasta la línea de acción de la fuerza.
3. El centro de gravedad del cuerpo y su ubicación.(diapositiva 4)
Centro de gravedad del cuerpo- este es el punto a través del cual pasa la resultante de todas las fuerzas de gravedad paralelas que actúan sobre elementos individuales del cuerpo (en cualquier posición del cuerpo en el espacio).
Encuentre el centro de gravedad de las siguientes figuras:

4. Tipos de saldo.
pero) (diapositivas 5-8)


Producción: El equilibrio es estable si, con una pequeña desviación de la posición de equilibrio, existe una fuerza que tiende a devolverlo a esta posición.
La posición en la que su energía potencial es mínima es estable. (diapositiva 9)
b) La estabilidad de los cuerpos situados sobre el fulcro o sobre el fulcro.(diapositivas 10-17)

Producción: Para la estabilidad de un cuerpo ubicado en un punto o línea de apoyo, es necesario que el centro de gravedad esté debajo del punto (línea) de apoyo.
c) La estabilidad de los cuerpos sobre una superficie plana.
(diapositiva 18)
1) superficie de apoyo- esta no siempre es una superficie que está en contacto con el cuerpo (sino que está limitada por líneas que conectan las patas de la mesa, trípode)

2) Análisis de una diapositiva de "Lecciones y pruebas electrónicas", disco "Trabajo y potencia", lección "Tipos de balanza".
Foto 1.
- ¿En qué se diferencian las heces? (Piedra cuadrada)
- ¿Cuál es más estable? (con área más grande)
- ¿En qué se diferencian las heces? (Ubicación del centro de gravedad)
- ¿Cuál es el más estable? (cual centro de gravedad es mas bajo)
- ¿Por qué? (Porque se puede desviar a un ángulo mayor sin volcarse)
3) Experiencia con un prisma desviador
- Coloquemos un prisma con una plomada en el tablero y comencemos a levantarlo gradualmente sobre un borde. ¿Qué vemos?
- Mientras la plomada cruce la superficie delimitada por el soporte, se mantendrá el equilibrio. Pero tan pronto como la vertical que pasa por el centro de gravedad comienza a sobrepasar los límites de la superficie de apoyo, la librería vuelca.
análisis diapositivas 19–22.

Conclusiones:
- El cuerpo con mayor área de apoyo es estable.
- De dos cuerpos de la misma área, el cuerpo cuyo centro de gravedad está más bajo es estable, porque se puede desviar sin volcar en un gran ángulo.
análisis diapositivas 23–25.

¿Qué barcos son los más estables? ¿Por qué? (Por lo cual la carga se encuentra en las bodegas, y no en la cubierta)

¿Qué coches son los más estables? ¿Por qué? (Para aumentar la estabilidad de los autos en las curvas, el lecho de la carretera se inclina en la dirección de la curva).
Conclusiones: El equilibrio puede ser estable, inestable, indiferente. La estabilidad de las carrocerías es mayor cuanto mayor es el área de apoyo y más bajo el centro de gravedad.
tercero Aplicación de los conocimientos sobre la estabilidad de los cuerpos.
- ¿Qué especialidades necesitan más conocimientos sobre el equilibrio de los cuerpos?
- Diseñadores y diseñadores de varias estructuras ( edificios de gran altura, puentes, torres de televisión, etc.)
- Artistas de circo.
- Conductores y otros profesionales.
(diapositivas 28–30)
- ¿Por qué Roly-Vstanka vuelve a la posición de equilibrio con cualquier inclinación del juguete?
- ¿Por qué la Torre Inclinada de Pisa está inclinada y no se cae?
- ¿Cómo mantienen el equilibrio los ciclistas y motociclistas?
Lección para llevar:
- Hay tres tipos de equilibrio: estable, inestable, indiferente.
- La posición del cuerpo es estable, en la que su energía potencial es mínima.
- La estabilidad de los cuerpos sobre una superficie plana es mayor cuanto mayor es el área de apoyo y más bajo el centro de gravedad.
Tarea: § 54 – 56 (G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky)
Fuentes y literatura utilizadas:
- G. Ya. Myakishev, B. B. Bukhovtsev, N. N. Sotsky. Física. Grado 10.
- Tira de película "Estabilidad" 1976 (escaneada por mí en un escáner de película).
- Disco "Movimiento e interacción de los cuerpos" de "Lecciones y pruebas electrónicas".
- Disco "Trabajo y potencia" de "Lecciones y pruebas electrónicas".
- En contacto con 0
- Google Mas 0
- OK 0
- Facebook 0