ՍԱՀՄԱՆՈՒՄ
կայուն հավասարակշռություն- սա հավասարակշռություն է, որի դեպքում մարմինը, դուրս բերված հավասարակշռությունից և թողնված ինքն իրեն, վերադառնում է իր նախկին դիրքին:
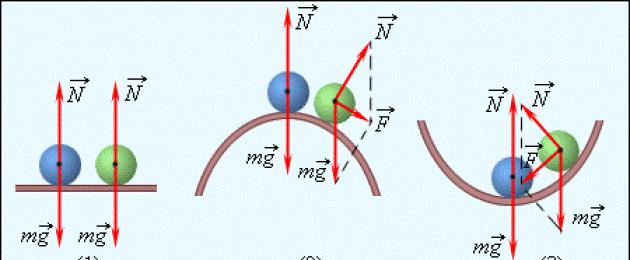
Դա տեղի է ունենում, եթե սկզբնական դիրքից մարմնի մի փոքր տեղաշարժով որևէ ուղղությամբ, մարմնի վրա ազդող ուժերի արդյունքը դառնում է ոչ զրոյական և ուղղված է դեպի հավասարակշռության դիրքը: Օրինակ՝ գնդաձեւ խոռոչի հատակին ընկած գնդակը (նկ. 1ա):
ՍԱՀՄԱՆՈՒՄ
Անկայուն հավասարակշռություն- սա հավասարակշռություն է, որի դեպքում հավասարակշռության դիրքից դուրս բերված և ինքն իրեն թողած մարմինն էլ ավելի կշեղվի հավասարակշռության դիրքից:
Այս դեպքում մարմնի հավասարակշռության դիրքից փոքր տեղաշարժի դեպքում նրա վրա կիրառվող ուժերի արդյունքը զրոյական չէ և ուղղված է հավասարակշռության դիրքից։ Օրինակ՝ գնդակը, որը գտնվում է ուռուցիկ գնդաձև մակերեսի վերևում (նկ. 1 բ):
ՍԱՀՄԱՆՈՒՄ
Անտարբեր հավասարակշռություն- սա հավասարակշռություն է, որի դեպքում մարմինը, դուրս բերված հավասարակշռությունից և թողնված ինքն իրեն, չի փոխում իր դիրքը (վիճակը):
Այս դեպքում, մարմնի սկզբնական դիրքից փոքր տեղաշարժերով, մարմնի վրա կիրառվող ուժերի արդյունքը մնում է հավասար զրոյի: Օրինակ՝ հարթ մակերեսի վրա ընկած գնդակը (նկ. 1, գ):
Նկ.1. Հենարանի վրա մարմնի հավասարակշռության տարբեր տեսակներ. ա) կայուն հավասարակշռություն. բ) անկայուն հավասարակշռություն; գ) անտարբեր հավասարակշռություն.
Մարմինների ստատիկ և դինամիկ հավասարակշռություն
Եթե ուժերի գործողության արդյունքում մարմինը արագացում չի ստանում, այն կարող է հանգստի վիճակում լինել կամ միատեսակ շարժվել ուղիղ գծով։ Հետևաբար, կարելի է խոսել ստատիկ և դինամիկ հավասարակշռության մասին:
ՍԱՀՄԱՆՈՒՄ
Ստատիկ հավասարակշռություն- սա այնպիսի հավասարակշռություն է, երբ կիրառական ուժերի գործողության ներքո մարմինը գտնվում է հանգստի վիճակում:
դինամիկ հավասարակշռություն- սա այնպիսի հավասարակշռություն է, երբ ուժերի ազդեցությամբ մարմինը չի փոխում իր շարժումը:
Կարող ստատիկ հավասարակշռությունկա մալուխների վրա կախված լապտեր, ցանկացած շինություն։ Որպես դինամիկ հավասարակշռության օրինակ, մենք կարող ենք դիտարկել անիվը, որը գլորվում է հարթ մակերեսի վրա շփման ուժերի բացակայության դեպքում:
Դրանից բխում է, որ եթե բոլորի երկրաչափական գումարը արտաքին ուժերկիրառվում է մարմնին հավասար է զրոյի, ապա մարմինը գտնվում է հանգստի վիճակում կամ կատարում է միատեսակ ուղղագիծ շարժում: Այս դեպքում ընդունված է ասել, որ մարմնի վրա կիրառվող ուժերը հավասարակշռում են միմյանց։ Արդյունքը հաշվարկելիս մարմնի վրա ազդող բոլոր ուժերը կարող են կիրառվել զանգվածի կենտրոնի վրա:
Որպեսզի չպտտվող մարմինը լինի հավասարակշռության մեջ, անհրաժեշտ է, որ մարմնի վրա կիրառվող բոլոր ուժերի արդյունքը հավասար լինի զրոյի:
$(\overrightarrow(F))=(\overrightarrow(F_1))+(\overrightarrow(F_2))+...= 0$
Եթե մարմինը կարող է պտտվել ինչ-որ առանցքի շուրջ, ապա նրա հավասարակշռության համար բավարար չէ, որ բոլոր ուժերի արդյունքը հավասար լինի զրոյի։
Ուժի պտտվող գործողությունը կախված է ոչ միայն դրա մեծությունից, այլև ուժի գործողության գծի և պտտման առանցքի միջև եղած հեռավորությունից:
Պտտման առանցքից մինչև ուժի գործողության գիծ գծված ուղղահայաց երկարությունը կոչվում է ուժի թեւ:
$F$ ուժի մոդուլի և d թևի արտադրյալը կոչվում է M ուժի մոմենտ։ Դրական են համարվում այն ուժերի պահերը, որոնք հակված են մարմինը պտտել ժամացույցի սլաքի ուղղությամբ։
Պտտման կանոն. պտտման ֆիքսված առանցքով մարմինը գտնվում է հավասարակշռության մեջ, եթե այս առանցքի շուրջ մարմնի վրա կիրառվող բոլոր ուժերի մոմենտների հանրահաշվական գումարը զրո է.
Ընդհանուր դեպքում, երբ մարմինը կարող է առաջ շարժվել և պտտվել, հավասարակշռության համար երկու պայմաններն էլ պետք է բավարարվեն՝ արդյունք ուժը պետք է հավասար լինի զրոյի, իսկ ուժերի բոլոր մոմենտների գումարը պետք է հավասար լինի զրոյի։ Այս երկու պայմաններն էլ բավարար չեն հանգստի համար։
Նկար 1. Անտարբեր հավասարակշռություն: Անիվի գլորում հորիզոնական մակերեսի վրա: Ստացված ուժը և ուժերի մոմենտը հավասար են զրոյի
Հորիզոնական մակերեսի վրա գլորվող անիվը անտարբեր հավասարակշռության օրինակ է (նկ. 1): Եթե անիվը կանգ է առնում ցանկացած կետում, այն կլինի հավասարակշռության մեջ: Մեխանիկայի անտարբեր հավասարակշռության հետ մեկտեղ առանձնանում են կայուն և անկայուն հավասարակշռության վիճակներ։
Հավասարակշռության վիճակը կոչվում է կայուն, եթե մարմնի այս վիճակից փոքր շեղումներով առաջանում են ուժեր կամ ուժերի պահեր, որոնք հակված են մարմինը վերադարձնել հավասարակշռության վիճակի:
Մարմնի անկայուն հավասարակշռության վիճակից փոքր շեղման դեպքում առաջանում են ուժեր կամ ուժերի պահեր, որոնք հակված են մարմինը հեռացնել հավասարակշռության դիրքից։ Հարթ հորիզոնական մակերեսի վրա ընկած գնդակը գտնվում է անտարբեր հավասարակշռության վիճակում:

Նկար 2. Հենարանի վրա գնդակի հավասարակշռության տարբեր տեսակներ: (1) - անտարբեր հավասարակշռություն, (2) - անկայուն հավասարակշռություն, (3) - կայուն հավասարակշռություն
Անկայուն հավասարակշռության օրինակ է գնդաձև եզրագծի վերին մասում գտնվող գնդակը: Ի վերջո, գնդաձեւ խոռոչի ստորին մասում գտնվող գնդակը գտնվում է կայուն հավասարակշռության վիճակում (նկ. 2):
Պտտման ֆիքսված առանցքով մարմնի համար հնարավոր են հավասարակշռության բոլոր երեք տեսակները։ Անտարբեր հավասարակշռություն է առաջանում, երբ պտտման առանցքը անցնում է զանգվածի կենտրոնով։ Կայուն և անկայուն հավասարակշռության դեպքում զանգվածի կենտրոնը գտնվում է պտտման առանցքով անցնող ուղղահայաց գծի վրա։ Այս դեպքում, եթե զանգվածի կենտրոնը գտնվում է պտտման առանցքից ցածր, հավասարակշռության վիճակը կայուն է։ Եթե զանգվածի կենտրոնը գտնվում է առանցքից վեր, ապա հավասարակշռության վիճակը անկայուն է (նկ. 3):

Նկար 3. O առանցքի վրա ամրացված համասեռ շրջանաձև սկավառակի կայուն (1) և անկայուն (2) հավասարակշռություն; C կետը սկավառակի զանգվածի կենտրոնն է. $(\overrightarrow(F))_t\ $-- գրավիտացիա; $(\overrightarrow(F))_(y\ )$-- առանցքի առաձգական ուժ; դ -- ուս
Հատուկ դեպք է մարմնի հավասարակշռությունը հենարանի վրա: Այս դեպքում հենարանի առաձգական ուժը չի կիրառվում մեկ կետի վրա, այլ բաշխվում է մարմնի հիմքի վրա։ Մարմինը գտնվում է հավասարակշռության մեջ, եթե մարմնի զանգվածի կենտրոնով գծված ուղղահայաց գիծը անցնում է հենակետային տարածքով, այսինքն՝ հենակետերը միացնող գծերով ձևավորված եզրագծի ներսում։ Եթե այս գիծը չի հատում աջակցության տարածքը, ապա մարմինը շրջվում է:
Առաջադրանք 1
Թեքված հարթությունը հորիզոնի նկատմամբ թեքված է 30o անկյան տակ (նկ. 4): Նրա վրա կա P մարմին, որի զանգվածը m=2 կգ է։ Շփումը կարելի է անտեսել: Բլոկի վրայով նետված թելը թեք հարթության հետ կազմում է 45o անկյուն։ Q բեռի ո՞ր կշռով կլինի P մարմինը հավասարակշռության մեջ.

Նկար 4
Մարմինը գտնվում է երեք ուժերի՝ P ծանրության ուժի, Q բեռնվածքի հետ թելի լարման և հարթության վրա հարթությանը ուղղահայաց ուղղությամբ նրա վրա սեղմող F առաձգական ուժի ազդեցության տակ։ Եկեք Р ուժը տարրալուծենք բաղադրիչների. $\overrightarrow(Р)=(\overrightarrow(Р))_1+(\overrightarrow(Р))_2$: Պայման $(\overrightarrow(P))_2=$ Հավասարակշռության համար, հաշվի առնելով շարժվող բլոկի ջանքերի կրկնապատկումը, անհրաժեշտ է, որ $\overrightarrow(Q)=-(2\overrightarrow(P))_1$: Այսպիսով, հավասարակշռության պայմանը՝ $m_Q=2m(sin \widehat((\overrightarrow(P))_1(\overrightarrow(P))_2)\ )$: Փոխարինելով արժեքները՝ ստանում ենք՝ $m_Q=2\cdot 2(sin \left(90()^\circ -30()^\circ -45()^\circ \right)\ )=1.035\ kg$։
Քամու ժամանակ կապած փուչիկը կախված է Երկրի մեկ այլ կետի վրա, որին կցված է մալուխը (նկ. 5): Մալուխի լարվածությունը 200 կգ է, ուղղահայաց հետ անկյունը՝ a=30$()^\circ$։ Որքա՞ն է քամու ճնշման ուժը:
\[(\overrightarrow(F))_in=-(\overrightarrow(T))_1;\ \ \ \ \left|(\overrightarrow(F))_in\right|=\left|(\overrightarrow(T)) _1\right|=Tg(sin (\mathbf \alpha)\)\] \[\left|(\overrightarrow(F))_in\right|=\ 200\cdot 9.81\cdot (sin 30()^\circ \ )=981\ N\]

Այս դասախոսությունը ներառում է հետևյալ հարցերը.
1. Մեխանիկական համակարգերի հավասարակշռության պայմանները.
2. Հավասարակշռության կայունություն.
3. Հավասարակշռության դիրքերի որոշման և դրանց կայունության ուսումնասիրության օրինակ:
Այս հարցերի ուսումնասիրությունը անհրաժեշտ է ուսումնասիրելու մեխանիկական համակարգի տատանողական շարժումները «Մեքենաների մասեր» առարկայի հավասարակշռության դիրքի նկատմամբ, «Մեքենաների և մեխանիզմների տեսություն» և «Նյութերի ամրություն» առարկաների խնդիրները լուծելու համար:
Մեխանիկական համակարգերի շարժման կարևոր դեպքը նրանց տատանողական շարժումն է։ Տատանումները մեխանիկական համակարգի կրկնվող շարժումներն են՝ կապված նրա որոշ դիրքերի հետ, որոնք ժամանակի ընթացքում քիչ թե շատ կանոնավոր են տեղի ունենում: Դասընթացի աշխատանքը դիտարկում է մեխանիկական համակարգի տատանողական շարժումը հավասարակշռության դիրքի նկատմամբ (հարաբերական կամ բացարձակ):
Մեխանիկական համակարգը կարող է բավական երկար տատանվել միայն կայուն հավասարակշռության դիրքի մոտ: Ուստի, նախքան տատանողական շարժման հավասարումները կազմելը, անհրաժեշտ է գտնել հավասարակշռության դիրքերը և ուսումնասիրել դրանց կայունությունը։
Մեխանիկական համակարգերի հավասարակշռության պայմանները.
Ըստ սկզբունքի հնարավոր շարժումներ(ստատիկության հիմնական հավասարումը), որպեսզի մեխանիկական համակարգը, որի վրա դրված են իդեալական, անշարժ, սահմանափակող և հոլոնոմական սահմանափակումներ, հավասարակշռության մեջ լինի, անհրաժեշտ է և բավարար, որ այս համակարգի բոլոր ընդհանրացված ուժերը հավասար լինեն զրոյի.
որտեղ համապատասխան ընդհանրացված ուժն է ժ- oh ընդհանրացված կոորդինատ;
ս- մեխանիկական համակարգում ընդհանրացված կոորդինատների քանակը.
Եթե հետազոտվող համակարգի համար կազմվել են շարժման դիֆերենցիալ հավասարումներ երկրորդ տեսակի Լագրանժի հավասարումների տեսքով, ապա հնարավոր հավասարակշռության դիրքերը որոշելու համար բավական է ընդհանրացված ուժերը հավասարեցնել զրոյի և լուծել ստացված հավասարումները. ընդհանրացված կոորդինատները.
Եթե մեխանիկական համակարգը հավասարակշռության մեջ է պոտենցիալ ուժային դաշտում, ապա (1) հավասարումներից ստանում ենք հետևյալ հավասարակշռության պայմանները.
Հետևաբար, հավասարակշռության դիրքում պոտենցիալ էներգիան ունի ծայրահեղ արժեք: Վերոհիշյալ բանաձևերով սահմանված ոչ բոլոր հավասարակշռությունները կարող են իրականացվել գործնականում: Կախված հավասարակշռության դիրքից շեղվելիս համակարգի վարքագծից՝ խոսվում է այս դիրքի կայունության կամ անկայունության մասին։
Հավասարակշռության կայունություն
Հավասարակշռության դիրքի կայունության հայեցակարգի սահմանումը տրվել է 19-րդ դարի վերջին ռուս գիտնական Ա.Մ.Լյապունովի աշխատություններում։ Եկեք նայենք այս սահմանմանը:
Հաշվարկները պարզեցնելու համար մենք հետագայում կհամաձայնեցնենք ընդհանրացված կոորդինատները ք 1 , ք 2 ,...,ք ս հաշվել համակարգի հավասարակշռության դիրքից.
որտեղ
Հավասարակշռության դիրքը կոչվում է կայուն, եթե ցանկացած կամայական փոքր թվի համարդուք կարող եք գտնել մեկ այլ համար այն դեպքում, երբ ընդհանրացված կոորդինատների և արագությունների սկզբնական արժեքները չեն գերազանցի:
Համակարգի հետագա շարժման ընթացքում ընդհանրացված կոորդինատների և արագությունների արժեքները չեն գերազանցի .
Այսինքն՝ համակարգի հավասարակշռության դիրքը ք 1 = ք 2 = ...= ք s= 0 կոչվում է կայուն, եթե միշտ հնարավոր է գտնել այդպիսի բավական փոքր սկզբնական արժեքներ, որի դեպքում համակարգի շարժումըչի թողնի հավասարակշռության դիրքի որևէ որոշակի կամայական փոքր հարևանություն. Ազատության մեկ աստիճան ունեցող համակարգի համար համակարգի կայուն շարժումը կարելի է պատկերացնել փուլային հարթությունում (նկ. 1):Կայուն հավասարակշռության դիրքի համար ներկայացուցչական կետի շարժումը՝ սկսած տարածաշրջանից [ ] , ապագայում տարածքից այն կողմ չի գնա.

Նկ.1
Հավասարակշռության դիրքը կոչվում է ասիմպտոտիկ կայուն , եթե ժամանակի ընթացքում համակարգը կմոտենա հավասարակշռության դիրքին, այսինքն
Հավասարակշռության դիրքի կայունության պայմանների որոշումը բավականին բարդ խնդիր է, հետևաբար, մենք սահմանափակվում ենք ամենապարզ դեպքով` պահպանողական համակարգերի հավասարակշռության կայունության ուսումնասիրությամբ:
Նման համակարգերի համար հավասարակշռության դիրքերի կայունության բավարար պայմանները սահմանվում են Լագրանժ - Դիրիխլեի թեորեմ : Պահպանողական մեխանիկական համակարգի հավասարակշռության դիրքը կայուն է, եթե հավասարակշռության դիրքում համակարգի պոտենցիալ էներգիան ունի մեկուսացված նվազագույնը. .
Մեխանիկական համակարգի պոտենցիալ էներգիան որոշվում է մինչև հաստատուն: Մենք ընտրում ենք այս հաստատունը, որպեսզի հավասարակշռության դիրքում պոտենցիալ էներգիահավասար էր զրոյի.
P(0)=0.
Այնուհետև, ազատության մեկ աստիճան ունեցող համակարգի համար մեկուսացված նվազագույնի գոյության բավարար պայման՝ անհրաժեշտ պայմանի հետ մեկտեղ (2) պայմանն է.
Քանի որ հավասարակշռության դիրքում պոտենցիալ էներգիան ունի մեկուսացված նվազագույն և P(0)=0 , ապա այս դիրքի որոշ վերջավոր հարևանությամբ
П(q)=0.
Կանչվում են այն ֆունկցիաները, որոնք ունեն հաստատուն նշան և հավասար են զրոյի միայն այն դեպքում, երբ նրանց բոլոր արգումենտները զրո են նշան-որոշ. Հետևաբար, որպեսզի մեխանիկական համակարգի հավասարակշռության դիրքը կայուն լինի, անհրաժեշտ է և բավարար, որ այս դիրքի մոտակայքում պոտենցիալ էներգիան լինի ընդհանրացված կոորդինատների դրականորեն սահմանված ֆունկցիա:
Գծային համակարգերի և համակարգերի համար, որոնք կարող են կրճատվել գծի հավասարակշռության դիրքից փոքր շեղումների դեպքում (գծային), պոտենցիալ էներգիան կարող է ներկայացվել որպես ընդհանրացված կոորդինատների քառակուսի ձև:

որտեղ - ընդհանրացված կոշտության գործակիցներ.
Ընդհանրացված գործակիցներհաստատուն թվեր են, որոնք կարող են ուղղակիորեն որոշվել պոտենցիալ էներգիայի մի շարքի ընդլայնումից կամ պոտենցիալ էներգիայի երկրորդ ածանցյալների արժեքներից՝ հավասարակշռված դիրքում ընդհանրացված կոորդինատների նկատմամբ.
Բանաձևից (4) հետևում է, որ կոշտության ընդհանուր գործակիցները սիմետրիկ են ինդեքսների նկատմամբ.
Համար կատարել բավարար պայմաններհավասարակշռության դիրքի կայունությունը, պոտենցիալ էներգիան պետք է լինի դրա ընդհանրացված կոորդինատների դրական հստակ քառակուսի ձևը:
Մաթեմատիկայի մեջ կա Սիլվեստրի չափանիշը , որը անհրաժեշտ և բավարար պայմաններ է տալիս քառակուսի ձևերի դրական որոշակիության համար. քառակուսի ձևը (3) կլինի դրական որոշակի, եթե նրա գործակիցներից և նրա բոլոր հիմնական անկյունագծային փոքրերից կազմված որոշիչը դրական են, այսինքն. եթե գործակիցները կբավարարի պայմանները
![]()
.....

Մասնավորապես, համար գծային համակարգերկու աստիճանի ազատության դեպքում Սիլվեստրի չափանիշի պոտենցիալ էներգիան և պայմանները կունենան ձև
Նմանապես կարելի է ուսումնասիրել հարաբերական հավասարակշռության դիրքերը, եթե պոտենցիալ էներգիայի փոխարեն հաշվի առնվի կրճատված համակարգի պոտենցիալ էներգիան։
Պ Հավասարակշռության դիրքերի որոշման և դրանց կայունության ուսումնասիրության օրինակ

Նկ.2
Հաշվի առեք մեխանիկական համակարգբաղկացած խողովակից ԱԲ, որը առանցքն է ՕՕ 1կապված է պտտման հորիզոնական առանցքի հետ, և գնդիկ, որը շարժվում է խողովակի միջով առանց շփման և միացված է մի կետի Ախողովակներ զսպանակով (նկ. 2): Եկեք որոշենք համակարգի հավասարակշռության դիրքերը և գնահատենք դրանց կայունությունը հետևյալ պարամետրերի համար՝ խողովակի երկարությունը լ 2 = 1 մ , ձողի երկարությունը լ 1 = 0,5 մ . չդեֆորմացված գարնան երկարությունը լ 0 = 0,6 մ, զսպանակի դրույքաչափը գ= 100 Ն/մ. Խողովակի քաշը մ 2 = 2 կգ, ձող - մ 1 = 1 կգ և գնդակ - մ 3 = 0,5 կգ: Հեռավորությունը ՕԱհավասար է լ 3 = 0,4 մ.
Եկեք գրենք դիտարկվող համակարգի պոտենցիալ էներգիայի արտահայտություն: Այն բաղկացած է երեք մարմինների պոտենցիալ էներգիայից՝ միատեսակ ձգողական դաշտում և դեֆորմացված աղբյուրի պոտենցիալ էներգիայից։
Ծանրության դաշտում մարմնի պոտենցիալ էներգիան հավասար է մարմնի քաշի և նրա ծանրության կենտրոնի բարձրության արտադրյալին այն հարթությունից, որում պոտենցիալ էներգիան համարվում է զրո: Թող պոտենցիալ էներգիան զրո լինի ձողի պտտման առանցքով անցնող հարթությունում OO 1, ապա գրավիտացիայի համար
Առաձգական ուժի համար պոտենցիալ էներգիան որոշվում է դեֆորմացիայի քանակով
![]()
Եկեք գտնենք համակարգի հնարավոր հավասարակշռության դիրքերը: Հավասարակշռության դիրքերում կոորդինատային արժեքները հետևյալ հավասարումների համակարգի արմատներն են.

Նմանատիպ հավասարումների համակարգ կարող է կազմվել ազատության երկու աստիճան ունեցող ցանկացած մեխանիկական համակարգի համար։ Որոշ դեպքերում հնարավոր է ստանալ համակարգի ճշգրիտ լուծում: Համակարգի համար (5) նման լուծում գոյություն չունի, ուստի արմատները պետք է փնտրել՝ օգտագործելով թվային մեթոդներ:
Լուծելով տրանսցենդենտալ հավասարումների համակարգը (5), մենք ստանում ենք երկու հնարավոր հավասարակշռության դիրք.
Ստացված հավասարակշռության դիրքերի կայունությունը գնահատելու համար մենք գտնում ենք պոտենցիալ էներգիայի բոլոր երկրորդ ածանցյալները ընդհանրացված կոորդինատների նկատմամբ և դրանցից որոշում կոշտության ընդհանուր գործակիցները։
![]()
Մարմինը գտնվում է հանգստի վիճակում (կամ շարժվում է հավասարաչափ և ուղիղ գծով), եթե նրա վրա ազդող բոլոր ուժերի վեկտորային գումարը զրո է։ Ասում են, որ ուժերը հավասարակշռում են միմյանց: Երբ գործ ունենք որոշակի երկրաչափական ձևի մարմնի հետ, արդյունքի ուժը հաշվարկելիս բոլոր ուժերը կարող են կիրառվել մարմնի զանգվածի կենտրոնի վրա։
Մարմինների հավասարակշռության պայմանը
Որպեսզի մարմինը, որը չի պտտվում, լինի հավասարակշռության մեջ, անհրաժեշտ է, որ նրա վրա ազդող բոլոր ուժերի արդյունքը հավասար լինի զրոյի։
F → = F 1 → + F 2 → +. . + F n → = 0:
Վերևի նկարը ցույց է տալիս հավասարակշռությունը ամուր մարմին. Բլոկը գտնվում է հավասարակշռության վիճակում նրա վրա գործող երեք ուժերի ազդեցության տակ։ F 1 → և F 2 → ուժերի գործողության գծերը հատվում են O կետում։ Ծանրության կիրառման կետը մարմնի զանգվածի կենտրոնն է C: Այս կետերը գտնվում են մեկ ուղիղ գծի վրա, և F 1 → , F 2 → և m g → ստացված ուժը հաշվարկելիս կրճատվում են մինչև C կետ:
Այն պայմանը, որ բոլոր ուժերի արդյունքը հավասար լինի զրոյի, բավարար չէ, եթե մարմինը կարող է պտտվել որևէ առանցքի շուրջ։
d ուժի ուսը ուժի գործողության գծից մինչև դրա կիրառման կետը գծված ուղղահայաց երկարությունն է։ Մ ուժի մոմենտը ուժի թեւի և նրա մոդուլի արտադրյալն է։
Ուժի պահը ձգտում է մարմինը պտտել իր առանցքի շուրջ: Դրական են համարվում այն պահերը, որոնք մարմինը պտտում են ժամացույցի սլաքի ուղղությամբ։ Ներսում ուժի պահի չափման միավորը միջազգային համակարգ C - 1 N m e t r.
Սահմանում. պահի կանոն
Եթե մարմնի նկատմամբ կիրառվող բոլոր պահերի հանրահաշվական գումարը նկատմամբ ֆիքսված առանցքռոտացիան զրոյական է, ապա մարմինը գտնվում է հավասարակշռության մեջ:
M1 + M2 + . . + M n = 0

Կարևոր.
Ընդհանուր դեպքում մարմինների հավասարակշռության համար պետք է պահպանվեն երկու պայման՝ արդյունքի ուժը հավասար է զրոյի և պահպանվում է պահերի կանոնը։
Մեխանիկայում՝ այնտեղ տարբեր տեսակներհավասարակշռություն. Այսպիսով, տարբերակվում է կայուն և անկայուն, ինչպես նաև անտարբեր հավասարակշռություն:

Անտարբեր հավասարակշռության տիպիկ օրինակ է պտտվող անիվը (կամ գնդակը), որը ցանկացած կետում կանգ առնելու դեպքում կլինի հավասարակշռության վիճակում։
Կայուն հավասարակշռությունը մարմնի այնպիսի հավասարակշռություն է, երբ իր փոքր շեղումներով առաջանում են ուժեր կամ ուժերի պահեր, որոնք հակված են մարմինը վերադարձնել հավասարակշռության վիճակի։
Անկայուն հավասարակշռություն - հավասարակշռության վիճակ, փոքր շեղումով, որից ուժերի ուժերն ու ակնթարթները հակված են մարմնին էլ ավելի դուրս բերել հավասարակշռությունից:

Վերևում գտնվող նկարում գնդակի դիրքը (1) - անտարբեր հավասարակշռություն, (2) - անկայուն հավասարակշռություն, (3) - կայուն հավասարակշռություն:
Պտտման ֆիքսված առանցքով մարմինը կարող է գտնվել նկարագրված հավասարակշռության դիրքերից որևէ մեկում: Եթե պտտման առանցքը անցնում է զանգվածի կենտրոնով, ապա անտարբեր հավասարակշռություն է առաջանում։ Կայուն և անկայուն հավասարակշռության դեպքում զանգվածի կենտրոնը գտնվում է ուղղահայաց գծի վրա, որն անցնում է պտտման առանցքով: Երբ զանգվածի կենտրոնը գտնվում է պտտման առանցքից ցածր, հավասարակշռությունը կայուն է։ Հակառակ դեպքում՝ հակառակը։

Հավասարակշռության հատուկ դեպք է մարմնի հավասարակշռությունը հենարանի վրա: Այս դեպքում առաձգական ուժը բաշխվում է մարմնի ողջ հիմքի վրա և չի անցնում մեկ կետով։ Մարմինը գտնվում է հանգստի վիճակում, երբ զանգվածի կենտրոնով գծված ուղղահայաց գիծը հատում է հենարանի տարածքը: Հակառակ դեպքում, եթե զանգվածի կենտրոնից գիծը չի ընկնում հենակետերը միացնող գծերով կազմված եզրագծի մեջ, մարմինը շրջվում է։
Հենարանի վրա մարմնի հավասարակշռության օրինակ է Պիզայի հայտնի թեք աշտարակը: Ըստ լեգենդի՝ Գալիլեո Գալիլեյը գնդակներ է գցել այնտեղից, երբ նա ուսումնասիրել է իր փորձերը. ազատ անկումհեռ.

Աշտարակի զանգվածի կենտրոնից գծված գիծը հատում է հիմքը կենտրոնից մոտավորապես 2,3 մ հեռավորության վրա:
Եթե տեքստում սխալ եք նկատել, ընդգծեք այն և սեղմեք Ctrl+Enter
Դասարան: 10
Ներկայացում դասի համար






























 Հետ առաջ
Հետ առաջ
Ուշադրություն. Սլայդի նախադիտումը միայն տեղեկատվական նպատակների համար է և կարող է չներկայացնել ներկայացման ամբողջ ծավալը: Եթե դուք հետաքրքրված եք այս աշխատանքըխնդրում ենք ներբեռնել ամբողջական տարբերակը:
Դասի նպատակները.Ուսումնասիրել մարմինների հավասարակշռության վիճակը, ծանոթանալ հավասարակշռության տարբեր տեսակներին. պարզել, թե ինչ պայմաններում է մարմինը գտնվում հավասարակշռության մեջ.
Դասի նպատակները.
- Ուսուցում.Ուսումնասիրել հավասարակշռության երկու պայմաններ, հավասարակշռության տեսակներ (կայուն, անկայուն, անտարբեր): Պարզեք, թե ինչ պայմաններում են մարմիններն ավելի կայուն։
- Զարգացող:Նպաստել ֆիզիկայի նկատմամբ ճանաչողական հետաքրքրության զարգացմանը: Համեմատելու, ընդհանրացնելու, գլխավորը լուսաբանելու, եզրակացություններ անելու հմտությունների զարգացում։
- Ուսումնական:Մշակել ուշադրություն, սեփական տեսակետն արտահայտելու և այն պաշտպանելու կարողություն, զարգացնել ուսանողների հաղորդակցման հմտությունները։
Դասի տեսակը.դաս ուսուցման նոր նյութ համակարգչային աջակցությամբ.
Սարքավորումներ:
- Սկավառակ «Աշխատանք և հզորություն» «Էլեկտրոնային դասեր և թեստեր.
- Աղյուսակ «Հավասարակշռության պայմաններ»:
- Պրիզմա թեքված սանրվածքով։
- Երկրաչափական մարմիններ՝ գլան, խորանարդ, կոն և այլն։
- Համակարգիչ, մուլտիմեդիա պրոյեկտոր, ինտերակտիվ գրատախտակ կամ էկրան:
- Ներկայացում.
Դասերի ժամանակ
Այսօր դասին մենք կիմանանք, թե ինչու կռունկը չի ընկնում, ինչու Roly-Vstanka խաղալիքը միշտ վերադառնում է իր սկզբնական վիճակին, ինչու չի ընկնում Պիզայի թեք աշտարակը:
I. Գիտելիքների կրկնություն և թարմացում.
- Ձևակերպեք Նյուտոնի առաջին օրենքը. Ինչպիսի՞ն է օրենքը:
- Ո՞ր հարցին է պատասխանում Նյուտոնի երկրորդ օրենքը: Բանաձև և ձևակերպում.
- Ո՞ր հարցին է պատասխանում Նյուտոնի երրորդ օրենքը: Բանաձև և ձևակերպում.
- Ո՞րն է արդյունքի ուժը: Ինչպես է նա?
- «Մարմինների շարժում և փոխազդեցություն» սկավառակից լրացրեք թիվ 9 «Տարբեր ուղղություններով ուժերի արդյունքը» առաջադրանքը (վեկտորի գումարման կանոնը (2, 3 վարժություն)):
II. Նոր նյութ սովորելը.
1. Ի՞նչ է կոչվում հավասարակշռություն:
Հավասարակշռությունը հանգստի վիճակ է:
2. Հավասարակշռության պայմաններ.(սլայդ 2)
ա) Ե՞րբ է մարմինը հանգստանում. Սա ո՞ր օրենքից է բխում:
Առաջին հավասարակշռության պայմանը.Մարմինը գտնվում է հավասարակշռության մեջ, եթե մարմնի վրա կիրառվող արտաքին ուժերի երկրաչափական գումարը զրո է։ ∑ F = 0
բ) Թող երկու հավասար ուժեր, ինչպես ցույց է տրված նկարում։

Արդյո՞ք նա հավասարակշռության մեջ կլինի: (Ոչ, նա կշրջվի)
Հանգիստ է միայն կենտրոնական կետիսկ մնացածը շարժվում են: Սա նշանակում է, որ մարմինը հավասարակշռության մեջ գտնվելու համար անհրաժեշտ է, որ յուրաքանչյուր տարրի վրա ազդող բոլոր ուժերի գումարը հավասար լինի 0-ի։
Երկրորդ հավասարակշռության պայմանը.Ժամացույցի սլաքի ուղղությամբ գործող ուժերի մոմենտների գումարը պետք է հավասար լինի ժամացույցի սլաքի ուղղությամբ գործող ուժերի մոմենտների գումարին:
∑ M ժամացույցի սլաքի ուղղությամբ = ∑ M հակառակ ուղղությամբ
Ուժի պահը՝ M = F L
L - ուժի ուս - ամենակարճ հեռավորությունը հենակետից մինչև ուժի գործողության գիծը:
3. Մարմնի ծանրության կենտրոնը և գտնվելու վայրը.(սլայդ 4)
Մարմնի ծանրության կենտրոնայն կետն է, որի միջոցով ազդող բոլոր զուգահեռ ձգողական ուժերի արդյունքը առանձին տարրերմարմին (տարածության մեջ մարմնի ցանկացած դիրքում):
Գտեք հետևյալ պատկերների ծանրության կենտրոնը.

4. Հավասարակշռության տեսակները.
ա) (սլայդներ 5-8)


Եզրակացություն:Հավասարակշռությունը կայուն է, եթե հավասարակշռության դիրքից փոքր շեղումով կա ուժ, որը հակված է այն վերադարձնել այս դիրքին:
Այն դիրքը, որտեղ նրա պոտենցիալ էներգիան նվազագույն է, կայուն է: (սլայդ 9)
բ) հենակետի կամ հենակետի վրա գտնվող մարմինների կայունությունը.(սլայդներ 10-17)

Եզրակացություն:Հենարանի մեկ կետի կամ գծի վրա տեղակայված մարմնի կայունության համար անհրաժեշտ է, որ ծանրության կենտրոնը լինի հենարանի կետից (գծից) ցածր:
գ) մարմինների կայունությունը հարթ մակերեսի վրա.
(սլայդ 18)
1) Աջակցման մակերես- սա միշտ չէ, որ մարմնի հետ շփվող մակերևույթ է (այլ այն սահմանափակված է սեղանի, եռոտանի ոտքերը միացնող գծերով)

2) Սլայդի վերլուծություն «Էլեկտրոնային դասեր և թեստեր», սկավառակ «Աշխատանք և հզորություն», դաս «Հավասարակշռության տեսակները».
Նկար 1.
- Ինչպե՞ս են տարբերվում աթոռակները: (քառակուսի հիմք)
- Ո՞րն է ավելի կայուն: (ավելի մեծ տարածքով)
- Ինչպե՞ս են տարբերվում աթոռակները: (Ծանրության կենտրոնի գտնվելու վայրը)
- Ո՞րն է ամենակայունը: (Ծանրության որ կենտրոնն է ավելի ցածր)
- Ինչո՞ւ։ (Քանի որ այն կարող է շեղվել ավելի մեծ անկյան տակ՝ առանց թեքվելու)
3) փորձ շեղվող պրիզմայով
- Եկեք տախտակի վրա դնենք մի պրիզմա, որն ունի սանրվածք և սկսենք աստիճանաբար բարձրացնել այն մեկ եզրից: Ի՞նչ ենք մենք տեսնում։
- Քանի դեռ սանրվածքը հատում է հենարանով սահմանափակված մակերեսը, հավասարակշռությունը պահպանվում է: Բայց հենց որ ծանրության կենտրոնով անցնող ուղղահայացը սկսում է դուրս գալ հենարանի մակերեսի սահմաններից, գրապահարանը շրջվում է։
Վերլուծություն սլայդներ 19–22.

Եզրակացություններ.
- Ամենամեծ աջակցության տարածք ունեցող մարմինը կայուն է։
- Նույն տարածքի երկու մարմիններից այն մարմինը, որի ծանրության կենտրոնն ավելի ցածր է, կայուն է, քանի որ այն կարող է շեղվել առանց մեծ անկյան տակ շրջվելու:
Վերլուծություն սլայդներ 23–25.

Ո՞ր նավերն են առավել կայուն: Ինչո՞ւ։ (որի համար բեռը գտնվում է պահարաններում, և ոչ թե տախտակամածի վրա)

Ո՞ր մեքենաներն են ամենակայունը: Ինչո՞ւ։ (Մեքենաների կայունությունը շրջադարձներին բարձրացնելու համար ճանապարհի մահճակալը թեքվում է շրջադարձի ուղղությամբ):
Եզրակացություններ.Հավասարակշռությունը կարող է լինել կայուն, անկայուն, անտարբեր: Մարմինների կայունությունն ավելի մեծ է, որքան մեծ է աջակցության տարածքը և որքան ցածր է ծանրության կենտրոնը:
III. Մարմինների կայունության մասին գիտելիքների կիրառում.
- Ո՞ր մասնագիտություններին է ամենից շատ անհրաժեշտ մարմինների հավասարակշռության մասին գիտելիքները:
- Տարբեր կառույցների դիզայներներ և դիզայներներ ( բարձրահարկ շենքեր, կամուրջներ, հեռուստաաշտարակներ և այլն)
- Կրկեսի արտիստներ.
- Վարորդներ և այլ մասնագետներ։
(սլայդներ 28–30)
- Ինչու՞ է Roly-Vstanka-ն վերադառնում հավասարակշռության դիրքի խաղալիքի ցանկացած թեքության դեպքում:
- Ինչո՞ւ է Պիզայի թեք աշտարակը թեքված և չի ընկնում.
- Ինչպե՞ս են հեծանվորդներն ու մոտոցիկլավարները պահպանում իրենց հավասարակշռությունը:
Դասերի պատրաստում.
- Հավասարակշռության երեք տեսակ կա՝ կայուն, անկայուն, անտարբեր։
- Մարմնի դիրքը կայուն է, որի դեպքում նրա պոտենցիալ էներգիան նվազագույն է։
- Հարթ մակերեսի վրա մարմինների կայունությունն ավելի մեծ է, որքան մեծ է աջակցության տարածքը և որքան ցածր է ծանրության կենտրոնը:
Տնային աշխատանք§ 54 – 56 (Գ.Յա. Մյակիշև, Բ.Բ. Բուխովցև, Ն.Ն. Սոցկի)
Օգտագործված աղբյուրներ և գրականություն.
- Գ.Յա. Մյակիշևը, Բ.Բ. Բուխովցև, Ն.Ն.Սոցկի.Ֆիզիկա. 10-րդ դասարան.
- Կինոժապավեն «Կայունություն» 1976 (սկանավորվել է իմ կողմից ֆիլմի սկաների վրա):
- Սկավառակ «Մարմինների շարժում և փոխազդեցություն» «Էլեկտրոնային դասեր և թեստեր».
- Սկավառակ «Աշխատանք և հզորություն» «Էլեկտրոնային դասեր և թեստեր»:
- հետ շփման մեջ 0
- Google+ 0
- լավ 0
- Ֆեյսբուք 0






