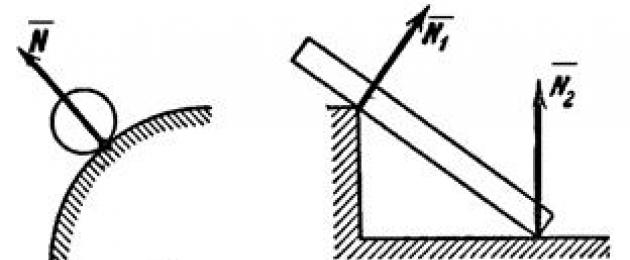
1. Un piano (superficie) o supporto liscio. Una superficie liscia è una superficie sulla quale l'attrito di un dato corpo può essere trascurato in prima approssimazione. Una tale superficie impedisce al corpo di muoversi solo nella direzione della perpendicolare comune (normale) alle superfici dei corpi in contatto nel punto del loro contatto (Fig. 7, UN). Quindi la reazione N superficie liscia o supporto è diretta lungo la normale comune alle superfici dei corpi in contatto nel punto del loro contatto e viene applicata in questo punto. Quando una delle superfici di contatto è un punto (Fig. 7, B), allora la reazione è diretta perpendicolarmente all'altra superficie.
Se le superfici non sono lisce, è necessario aggiungere un'altra forza: la forza di attrito, che è diretta perpendicolarmente alla reazione normale nella direzione opposta al possibile scorrimento del corpo.

Riso. 7
2. Discussione. La connessione, realizzata sotto forma di filo flessibile e inestensibile (Fig. 8), non dà corpo M allontanarsi dal punto di sospensione del filo nella direzione SONO.. Quindi la reazione T il filo teso è diretto lungo il filo dal corpo fino alla sua sospensione.

Riso. 8
3. Giunto cilindrico (cuscinetto). Se due corpi sono collegati da un bullone che passa attraverso i fori di questi corpi, tale connessione è chiamata cerniera o semplicemente cerniera; La linea centrale del bullone è chiamata asse della cerniera. Corpo AB, fissato mediante cerniera al supporto D(Fig.9, UN), può essere ruotato a piacere attorno all'asse cerniera (nel piano del disegno); questa è la fine UN il corpo non può muoversi in nessuna direzione perpendicolare all'asse cerniera. Quindi la reazione R una cerniera cilindrica può avere qualsiasi direzione in un piano perpendicolare all'asse della cerniera, cioè nell'aereo UN eh. Per forza R in questo caso non si conosce in anticipo nemmeno il suo modulo R, né direzione (angolo).
4. Giunto sferico e cuscinetto reggispinta. Questo tipo di connessione fissa alcuni punti del corpo in modo che non possa compiere alcun movimento nello spazio. Un esempio di tali collegamenti è il giunto sferico con cui la fotocamera viene fissata al treppiede (fig. 9, B) e un cuscinetto con una spinta (spinta) (Fig. 9, V). Reazione R un giunto sferico o un cuscinetto reggispinta può avere qualsiasi direzione nello spazio. Per questo non è noto in anticipo nemmeno il modulo di reazione R, né gli angoli da esso formati con gli assi x, y, z.

Riso. 9
5. Asta. Lascia che la connessione in qualche struttura sia un'asta AB, fissati alle estremità con cerniere (Fig. 10). Supponiamo che il peso dell'asta possa essere trascurato rispetto al carico che percepisce. Quindi sull'asta agiranno solo due forze applicate ai cardini UN E IN. Ma se l'asta ABè in equilibrio, quindi, secondo l'assioma 1, applicato nei punti UN E IN le forze devono essere dirette lungo una linea retta, cioè lungo l'asse dell'asta. Di conseguenza un'asta caricata alle estremità, il cui peso può essere trascurato rispetto a questi carichi, lavora solo in tensione o compressione. Se tale asta è un collegamento, la reazione dell'asta sarà diretta lungo l'asse dell'asta.

Fig.10
6. Supporto mobile incernierato (Fig. 11, supporto UN) impedisce al corpo di muoversi solo nella direzione perpendicolare al piano di scorrimento del supporto. La reazione di tale supporto è diretta perpendicolarmente alla superficie su cui poggiano i rulli del supporto mobile.
7. Supporto fisso incernierato (Fig. 11, supporto IN). La reazione di tale supporto passa attraverso l'asse della cerniera e può avere qualsiasi direzione nel piano del disegno. Quando risolviamo i problemi, rappresenteremo la reazione in base ai suoi componenti e nelle direzioni degli assi delle coordinate. Se, risolto il problema, troviamo e , allora verrà determinata anche la reazione; modulo ![]()

Fig.11
Il metodo di fissaggio mostrato in Fig. 11 viene utilizzato in modo che nella trave AB non si sono verificate ulteriori sollecitazioni quando la sua lunghezza è cambiata a causa di cambiamenti di temperatura o flessione.
Tieni presente che se il supporto UN Se anche la trave (Fig. 11) viene resa immobile, allora la trave, quando su di essa agisce un qualsiasi sistema piano di forze, sarà staticamente indeterminata, poiché allora le tre equazioni di equilibrio includeranno quattro reazioni sconosciute , , , .
8. Supporto fisso a pinzatura o ancoraggio rigido (Fig. 12). In questo caso, un sistema di forze di reazione distribuite agisce sull'estremità incassata della trave dal lato dei piani di appoggio. Considerando queste forze da portare al centro UN, possiamo sostituirli con una forza sconosciuta in anticipo, applicata in questo centro, e una coppia con un momento sconosciuto in anticipo. La forza può, a sua volta, essere rappresentata dalle sue componenti e. Pertanto, per trovare la reazione di un supporto stazionario che pizzica, è necessario determinare tre incognite , e . Se sotto una trave del genere da qualche parte in un punto IN aggiungi un altro supporto, la trave diventerà staticamente indeterminata.

Fig.12
Quando si determinano le reazioni di accoppiamento di altre strutture, è necessario stabilire se consente il movimento lungo tre assi reciprocamente perpendicolari e la rotazione attorno a questi assi. Se interferisce con qualche movimento, mostra la forza corrispondente; se interferisce con la rotazione, mostra una coppia con il momento corrispondente.
A volte devi studiare l'equilibrio dei corpi non rigidi. In questo caso, utilizzeremo l'ipotesi che se questo corpo non rigido è in equilibrio sotto l'azione delle forze, allora può essere considerato un corpo solido, utilizzando tutte le regole e i metodi della statica.
Esempio 1. Una forza orizzontale agisce su un arco a tre cerniere senza peso (Fig. 13). Determinare la linea d'azione della reazione (reazione di connessione nel punto UN).
Soluzione: Diamo un'occhiata al lato destro dell'arco separatamente. A punti IN E CON Applichiamo le forze di reazione di legame e . Un corpo sotto l'influenza di due forze è in equilibrio. Secondo l'assioma sull'equilibrio di due forze, le forze e sono uguali in grandezza e agiscono lungo una linea retta in direzioni opposte. Pertanto, conosciamo la direzione della forza (lungo la linea Sole).

Riso. 13
Diamo un'occhiata al lato sinistro dell'arco separatamente. A punti UN E CON Applichiamo le forze di reazione di legame e . La forza, l'azione è uguale alla reazione. Sul corpo agiscono tre forze, le direzioni di due forze ( e .) sono note. Secondo il teorema delle tre forze, le linee di azione di tutte e tre le forze si intersecano in un punto. Pertanto, la forza è diretta lungo la linea A.D. diretto lungo la linea AE.
Parte finale
Ricordiamo che questa lezione copre i concetti di base della statica: una coppia di forze, il momento di una coppia di forze, connessioni, reazioni di connessioni.
Rispondi alle domande dei cadetti.
Assegna un compito di auto-preparazione.
V. Compito di studio autonomo
1. Analizzare il materiale nel riassunto.
2. Studiare le domande: il problema principale della statica, condizioni analitiche per l'equilibrio di un sistema arbitrario di forze.
VI. Letteratura
1. Butenin N.V., Lunts Ya.L., Merkin D.R. Corso teorico
meccanica in 2 volumi. – San Pietroburgo: Lan, 2008, 736 p.
2. Yablonsky A.A., Nikiforova V.M. Corso di meccanica teorica. Parte 1. Statica. Cinematica. M.: Più in alto. scuola, 2004
3. Tsyvilsky V.L. Meccanica teorica. M.: Scuola superiore, 2004. – 343 p.
Sviluppato da ____________________________________________________
(firma, carica, cognome, titolo)
"___" ________________2012
CORSO DI LEZIONI DI MECCANICA TEORICA
Lezione 1
La meccanica teorica è la scienza delle leggi più generali del movimento meccanico e dell'equilibrio degli oggetti materiali.
I concetti e le definizioni di base della meccanica teorica sono nati sulla base di numerosi esperimenti e osservazioni di fenomeni naturali, seguiti dall'astrazione dalle condizioni specifiche di ciascun esperimento. Nella meccanica teorica vengono utilizzate le astrazioni ultime: un punto materiale e un corpo assolutamente rigido. Le astrazioni di cui sopra consentono di studiare le leggi più generali del movimento meccanico, che corrisponde al compito principale della meccanica teorica. La meccanica teorica è la base per lo studio di discipline come la resistenza dei materiali e delle parti delle macchine.
Il corso di meccanica teorica si compone di tre parti: statica, cinematica e dinamica.
La statica è una branca della meccanica teorica che studia l'equilibrio statico dei corpi materiali sotto l'influenza delle forze ad essi applicate.
Concetti base di statica:
1. Se un certo corpo non si muove rispetto a un altro corpo, allora si dice che il primo corpo è in uno stato di relativo equilibrio. Il corpo in relazione al quale viene considerato l'equilibrio degli altri corpi è detto corpo di riferimento.
2. Qualsiasi corpo, sotto l'influenza delle forze ad esso applicate, cambia le sue dimensioni e forma geometriche, ad es. deforme. Nella meccanica teorica queste deformazioni non vengono prese in considerazione e vengono considerati solo i corpi indeformabili, cioè assolutamente rigidi. Un corpo si dice assolutamente solido se la distanza tra due punti qualsiasi rimane costante.
3. La misura dell'interazione meccanica dei corpi è la forza. La forza è una quantità vettoriale, è caratterizzata dal suo punto di applicazione, direzione e grandezza (Fig. 1.1). L'unità di forza è il newton (N).
4. L'insieme delle forze che agiscono su qualsiasi corpo è chiamato sistema di forze. Il sistema di forze è designato ( , , , … ) – un sistema costituito da n forze.
5. Un sistema di forze equilibrato o equivalente a zero è un tale sistema di forze che, se applicato a un corpo solido, non ne viola lo stato. Cioè, se un certo corpo non ha cambiato la sua posizione rispetto al corpo di riferimento prima di applicare un sistema equilibrato di forze, allora non la cambierà nemmeno dopo aver applicato ad esso questo sistema. Un sistema equilibrato di forze è designato come segue: ( , , , … )<=>0 (<=>- segno di equivalenza).
6. Se ad un certo corpo viene applicato un sistema di forze ( , , , … ) e ad esso applichiamo un altro sistema di forze ( , , , … ), tale che insieme al primo formerà un sistema di forze equilibrato. In questo caso il sistema ( , , , …) è chiamato sistema di bilanciamento delle forze. Se il sistema di bilanciamento è costituito da una forza, allora questa forza è chiamata forza di bilanciamento per il sistema di forze (, , , …).
7. Se ciascuno dei due sistemi di forze ( , , , … ) e ( , , , … ) sono bilanciati dallo stesso sistema di forze ( , , , … ), allora i primi due sistemi di forze sono equivalenti tra loro ( , , , …)<=>( , , , ... ). Conclusione: sostituire un sistema di forze agenti su un corpo con un sistema ad esso equivalente non cambia lo stato in cui si trova il corpo.
8. Se un sistema di forze è equivalente a una forza, allora questa forza è chiamata la risultante di questo sistema di forze.
Assiomi della statica
Assioma 1. Un corpo libero assolutamente rigido è in equilibrio sotto l'azione di due forze se e solo se le forze agiscono lungo una retta in direzioni opposte e hanno moduli uguali.

Assioma 2. L'azione di un dato sistema di forze su un corpo assolutamente rigido non cambierà se ad esso si aggiunge o si elimina da esso un sistema di forze equivalente a zero.
{ , , , … } <=> { , , , … , , , , … };
{ , , , … } <=> 0
| |
| |
Assioma 4. Le forze di interazione tra due corpi sono uguali in grandezza e dirette lungo una linea retta in direzioni opposte.
Il corpo è chiamato gratuito, se i suoi movimenti nello spazio non sono limitati da nulla. Se vengono imposte restrizioni al movimento dei punti del corpo, viene chiamato il corpo non libero o correlati. I corpi materiali che limitano il movimento di un dato corpo sono chiamati connessioni. La forza con cui un legame agisce su un dato corpo è detta reazione di legame. La forza agisce sulla connessione e la reazione della connessione agisce sul corpo.
Assioma 5. (Assioma di liberazione dalle connessioni). L'equilibrio del corpo non sarà disturbato se le connessioni che gli vengono imposte vengono sostituite dalle reazioni delle connessioni.
Assioma 6. (Assioma sulla solidificazione). L'equilibrio di un corpo deformabile non cambierà se gli vengono imposti ulteriori vincoli o se diventa assolutamente solido.
Corollari dagli assiomi
Corollario 1. Una forza applicata ad un corpo assolutamente rigido può essere trasferita in qualsiasi punto della sua linea d'azione. In questo caso, l'effetto della forza sul corpo non cambierà.
Prova:
 Lasciamo che una forza applicata ad un punto agisca su un corpo rigido UN(Fig. 1.4). Applichiamoci ad un certo punto IN linee d'azione delle forze F sistema di forze ( , )<=>0, che è consentito in base all'Assioma 2. Accettiamo = = . Di conseguenza, otteniamo un sistema di forze ( , , )<=> .
Lasciamo che una forza applicata ad un punto agisca su un corpo rigido UN(Fig. 1.4). Applichiamoci ad un certo punto IN linee d'azione delle forze F sistema di forze ( , )<=>0, che è consentito in base all'Assioma 2. Accettiamo = = . Di conseguenza, otteniamo un sistema di forze ( , , )<=> .
Notare che ( , )<=>0, in base all'assioma 2, questo sistema di forze può essere scartato. Otteniamo<=>{ , , }<=> .
Conclusione: la forza è un vettore scorrevole.
Corollario 2. Il teorema sulla condizione necessaria per l'equilibrio di un corpo sotto l'azione di tre forze non parallele giacenti sullo stesso piano.
Se un corpo libero è in uno stato di equilibrio sotto l'azione di tre forze non parallele che giacciono sullo stesso piano, allora le linee di azione di queste forze si intersecano in un punto.
Prova:
 Si applichino tre forze , , al corpo (Fig. 1.5). (,,,)<=>0. Poiché le linee di azione delle forze non sono parallele, allora due di esse (anche se ) si intersecheranno ad un certo punto DI. Spostiamo F 1 e F 2 al dunque DI e sostituire queste forze con la risultante. Otteniamo (,,,)<=>( , ), e affinché il corpo sia in equilibrio, deve essere soddisfatta la seguente condizione: = , e devono essere diretti lungo una linea retta in direzioni opposte. Cioè, la linea di azione della forza deve passare per il punto di intersezione delle linee di azione delle forze e.
Si applichino tre forze , , al corpo (Fig. 1.5). (,,,)<=>0. Poiché le linee di azione delle forze non sono parallele, allora due di esse (anche se ) si intersecheranno ad un certo punto DI. Spostiamo F 1 e F 2 al dunque DI e sostituire queste forze con la risultante. Otteniamo (,,,)<=>( , ), e affinché il corpo sia in equilibrio, deve essere soddisfatta la seguente condizione: = , e devono essere diretti lungo una linea retta in direzioni opposte. Cioè, la linea di azione della forza deve passare per il punto di intersezione delle linee di azione delle forze e.
Lezione 2
Tipi di connessioni e loro reazioni
Quando si risolvono problemi tecnici, diventa necessario cercare reazioni di varie connessioni. La regola generale da applicare è la seguente: se il movimento di un punto qualsiasi del corpo è limitato, allora la reazione deve essere applicata in quel punto nella direzione opposta a quella in cui è limitato il movimento.
Principali tipologie di collegamenti:
1. Superficie o supporto liscio. Una superficie su cui l'attrito può essere trascurato è considerata liscia. La reazione di una superficie liscia si riduce solo alla reazione diretta lungo la normale generale alle superfici in contatto, supponendo che questa normale esista (Fig. 2.1.a). Se non esiste una normale comune, cioè una delle superfici ha un punto d'angolo o un “punto”, la reazione è diretta lungo la normale all'altra superficie (Fig. 2.1.b).
3.  Comunicazione flessibile. Questo tipo di connessione include connessioni effettuate utilizzando una catena, un cavo, una fune, ecc. La reazione di tale connessione è sempre diretta lungo la connessione (Fig. 2.3).
Comunicazione flessibile. Questo tipo di connessione include connessioni effettuate utilizzando una catena, un cavo, una fune, ecc. La reazione di tale connessione è sempre diretta lungo la connessione (Fig. 2.3).
4. Cerniera cilindrica (Fig. 2.4) e cuscinetto (supporto B in Fig. 2.5). Una cerniera cilindrica è un collegamento tra due o più corpi mediante un'asta cilindrica, il cosiddetto perno, inserita nei fori di tali corpi. La cerniera cilindrica impedisce il movimento in qualsiasi direzione nel piano XOY. La reazione di una cerniera cilindrica fissa (supporto incernierato-fisso) è rappresentata sotto forma di componenti sconosciuti e , le cui linee di azione sono parallele o coincidono con gli assi delle coordinate (Fig. 2.4).
5. Cuscinetto reggispinta (supporto A, Fig. 2.5) e cerniera sferica (Fig. 2.6). Questo tipo di connessione può essere rappresentata sotto forma di un'asta con una superficie sferica all'estremità, che è fissata ad un supporto, che fa parte di una cavità sferica. Una cerniera sferica impedisce il movimento in qualsiasi direzione nello spazio, quindi la sua reazione è rappresentata sotto forma di tre componenti, , , , parallele ai corrispondenti assi delle coordinate.
6. 
 |
Supporto articolato e mobile. Questo tipo di connessione è strutturalmente realizzata sotto forma di una cerniera cilindrica che può muoversi liberamente lungo la superficie. La reazione del supporto mobile snodato è sempre diretta perpendicolarmente al piano di appoggio (supporto A in Fig. 2.7).
7. Supporto fisso incernierato. La reazione di un supporto incernierato-fisso è rappresentata sotto forma di componenti sconosciuti e , le cui linee di azione sono parallele o coincidono con gli assi delle coordinate (supporto B in Fig. 2.7).
8. Un'asta senza peso (diritta o curva), fissata alle estremità con cerniere. La reazione di tale asta è definita e diretta lungo la linea che collega i centri delle cerniere (Fig. 2.8).

9. Sigillo duro. Si tratta di un tipo di collegamento insolito, poiché oltre ad impedire il movimento nel piano XOY, la guarnizione rigida impedisce la rotazione dell'asta (trave) rispetto al punto UN. Pertanto, la reazione di accoppiamento si riduce non solo alla reazione R (R a x, R a y), ma anche al momento reattivo M pa (Fig. 2.9).
Il corpo è chiamato gratuito, se i suoi movimenti non sono limitati da nulla. Si chiama corpo il cui movimento è limitato da altri corpi non libero . Vengono chiamati corpi che limitano il movimento di un dato corpo connessioni . Si chiamano le forze con cui i legami agiscono su un dato corpo reazioni delle connessioni .
Il principio di liberazione: qualsiasi corpo non libero può considerarsi libero se l'azione dei legami è sostituita dalle loro reazioni applicate al corpo.
Tipi fondamentali di connessioni:
UN) supporto su una superficie idealmente liscia - la reazione della superficie è diretta perpendicolarmente ad essa, cioè perpendicolare alla tangente - reazione normale;
B) una delle superfici a contatto è un punto (angolo), la reazione è diretta perpendicolarmente all'altra superficie;
V) filo: la reazione è diretta lungo il filo fino al punto di sospensione;
G) cerniera cilindrica (supporto fisso con cerniera) - la reazione può avere qualsiasi direzione nel piano, quando si risolvono i problemi viene sostituita da due componenti reciprocamente perpendicolari;
D) supporto mobile articolato cilindrico (cerniera su rulli) - la reazione è diretta perpendicolarmente al piano di appoggio;
e) asta senza peso (necessariamente senza peso) – la reazione è diretta lungo l'asta;
E) incastro rigido (trave incassata nel muro) - avviene una reazione diretta arbitrariamente - forza e momento reattivo, sconosciuti anche nella direzione. La reazione è divisa in due componenti.
3. Proiezione della forza sull'asse e sul piano
La proiezione di una forza su un asse è una quantità algebrica pari al prodotto del modulo della forza per il coseno dell'angolo formato dalla forza e dalla direzione positiva dell'asse. Se quest'angolo è acuto la proiezione è positiva, se è ottuso è negativa e se la forza è perpendicolare all'asse la sua proiezione sull'asse è zero.
Proiezione della forza su un piano Ohohè chiamato il vettore racchiuso tra le proiezioni dell'inizio e della fine della forza su questo piano. .
Le forze possono essere specificate non solo utilizzando i vettori, ma anche analiticamente, utilizzando le proiezioni delle forze sugli assi delle coordinate. Usiamo il giusto sistema di coordinate, ad es. quello in cui è allineato l'asse più corto Bue C Ehi si verifica se visto dall'estremità positiva dell'asse Oz, in senso antiorario.
Per il sistema spaziale: ,
Fx =Fcosa; Fy =Fcosb; F z = Fcosg;
4. Aggiunta di forze
Metodo geometrico per sommare le forze
1. Somma di due forze.
La somma geometrica di due forze si trova con la regola del parallelogramma o costruendo un triangolo di forza raffigurante una delle metà di questo parallelogramma.
2. Aggiunta di tre forze che non giacciono sullo stesso piano.
La somma geometrica di tre forze , , , non giacenti sullo stesso piano è rappresentata dalla diagonale di un parallelepipedo costruito su tali forze (regola del parallelepipedo). Ne siamo convinti applicando coerentemente la regola del parallelogramma.
3. Aggiunta di un sistema di forze.
La somma geometrica (vettore principale) di qualsiasi sistema di forze è determinata dalla somma sequenziale delle forze del sistema secondo la regola del parallelogramma, oppure dalla costruzione di un poligono di forza. Il secondo metodo è più semplice e conveniente. Per trovare la somma delle forze , , , …, utilizzando questo metodo, tracciamo da un punto arbitrario un vettore che rappresenta la forza su una scala selezionata, da un punto - un vettore che rappresenta la forza, da un punto - un vettore che rappresenta la forza , ecc.; dalla fine del penultimo vettore lasciamo il vettore che rappresenta . Collegando l'inizio del primo vettore con la fine dell'ultimo, otteniamo un vettore che rappresenta la somma geometrica o il vettore principale delle forze sommate: .
Metodo analitico per sommare le forze.
Le forze possono anche essere aggiunte analiticamente utilizzando le proiezioni di queste forze sugli assi delle coordinate. In questo caso la proiezione del vettore somma su un asse qualsiasi è uguale alla somma algebrica delle proiezioni dei termini sullo stesso asse. -> R x =åF ix ; R y =åF iy ; R z =åF iz ; .
Se le forze si trovano sullo stesso piano, allora R x =åF ix ; R y =åF iy ; .
5. Equilibrio di un sistema di forze convergenti
Convergente sono chiamate forze le cui linee di azione si intersecano in un punto. Risultante IO delle forze convergenti è pari alla somma geometrica (vettore principale) di tali forze e si applica nel punto della loro intersezione. Per l'equilibrio di un sistema di forze convergenti applicato ad un corpo solido è necessario e sufficiente che la risultante di tali forze sia pari a zero
1. Condizione di equilibrio geometrico . Affinché un sistema di forze convergenti sia in equilibrio, è necessario e sufficiente che il poligono delle forze costruito da queste forze sia chiuso.
2. Condizioni di equilibrio analitico . ó , , .
Di conseguenza, per l'equilibrio di un sistema spaziale di forze convergenti, è necessario e sufficiente che le somme delle proiezioni di tali forze su ciascuno dei tre assi coordinati siano pari a zero. åF ix =0; åF iy =0; åFiz =0. Per un sistema piatto, solo le prime 2 equazioni.
3. Teorema delle tre forze : Se un corpo rigido è in equilibrio sotto l'azione di tre forze non parallele che giacciono sullo stesso piano, le linee di azione di queste forze si intersecano in un punto.
Per dimostrare il teorema, consideriamo prima due delle forze che agiscono sul corpo, ad esempio e . Poiché, secondo le condizioni del teorema, queste forze giacciono sullo stesso piano e non sono parallele, le loro linee di azione si intersecano in un punto A. Applichiamo le forze in questo punto e sostituiamole con la risultante
Questa pubblicazione ti aiuterà a sistematizzare le conoscenze acquisite in precedenza, nonché a prepararti per un esame o test e a superarlo con successo.
* * *
dalla società litri.
2. Connessioni e reazioni delle connessioni
Tutti i corpi sono divisi in libero e vincolato.
Corpi liberi– questi sono corpi il cui movimento non è limitato.
Corpi legati- questi sono corpi il cui movimento è limitato da altri corpi.
Si chiamano corpi che limitano il movimento di altri corpi connessioni.
Vengono chiamate le forze che agiscono dalle connessioni e che impediscono il movimento reazioni delle connessioni. La reazione comunicativa è sempre diretta dal lato dove non può essere spostata.
Qualsiasi corpo legato può essere immaginato libero se i legami vengono sostituiti da reazioni (principio di liberazione dai legami).
Le connessioni sono suddivise in diversi tipi.
Connessione: supporto fluido(senza attrito) - la reazione di supporto viene applicata al punto di supporto ed è sempre diretta perpendicolarmente al supporto.
Comunicazione flessibile(filo, fune, cavo, catena) – il carico è sospeso su due fili. La reazione del filo è diretta lungo il filo lontano dal corpo e il filo può solo essere allungato.
Asta dura– l'asta può essere compressa o allungata. La reazione dell'asta è diretta lungo l'asta. L'asta funziona in tensione o compressione. La direzione esatta della reazione viene determinata rimuovendo mentalmente l'asta e considerando i possibili movimenti del corpo senza questa connessione.
Possibile trasferimento punto si chiama quel movimento mentale infinitesimale consentito in un dato momento.
Supporto articolato. La cerniera consente la rotazione attorno al punto di attacco. Esistono due tipi di cerniere.
Cerniera mobile. L'asta fissata alla cerniera può ruotare attorno alla cerniera e il punto di attacco può spostarsi lungo la guida (piattaforma). La reazione della cerniera mobile è diretta perpendicolarmente alla superficie di appoggio, poiché non è consentito solo il movimento attraverso la superficie di appoggio.
Cerniera fissa. Il punto di associazione non può essere spostato.
L'asta può ruotare liberamente attorno all'asse della cerniera. La reazione di un tale supporto passa attraverso l'asse cerniera, ma la sua direzione non è nota. È raffigurato come due componenti: orizzontale e verticale ( R X , R sì).
Pizzicare o "sigillare". Non è possibile alcun movimento del punto di attacco.
Sotto l'influenza di forze esterne, nel supporto si formano una forza reattiva e un momento reattivo M z, impedendone la rotazione.
La forza reattiva è rappresentata come due componenti lungo gli assi delle coordinate:
R = R X +R sì .
* * *
Il frammento introduttivo del libro Meccanica tecnica. Presepe (Aurika Lukovkina, 2009) fornito dal nostro partner per i libri -
1. Piano o superficie liscia (senza attrito). Tali connessioni impediscono al corpo di muoversi solo nella direzione della normale comune al punto di contatto, lungo la quale sarà diretta la reazione corrispondente. Pertanto la reazione di un supporto piano liscio è perpendicolare a tale supporto (reazione in Fig. 12,a); la reazione di una parete liscia è perpendicolare a questa parete Fig. 12, b); la reazione di una superficie liscia è diretta lungo la normale a questa superficie, disegnata nel punto di contatto in Fig. 12,c).

2. Protrusione tagliente. In questo caso, possiamo supporre che la sporgenza stessa sia supportata e che il corpo in questione serva da supporto. Ciò porta al caso 1 e alla conclusione che la reazione di una sporgenza liscia è diretta perpendicolarmente alla superficie del corpo di supporto (forza in Fig. 12, c).
3. Connessione flessibile (filo senza peso, cavo, catena, ecc.). La reazione corrispondente è diretta lungo la connessione dal punto di attacco del filo al punto di sospensione (forza in Fig. 11, d, forza in Fig. 12, b).
4. Asta diritta senza peso con cerniere alle estremità. La reazione è diretta lungo l'asta. Poiché l'asta può essere compressa o allungata, la reazione può essere diretta sia verso il punto di sospensione dell'asta che lontano dal punto di sospensione (reazioni in Fig. 13, a).
5. Asta a gomito o curva senza peso. La reazione è diretta lungo una linea retta passante per i centri delle cerniere terminali (forza 53 in Fig. 13, a; forza S in Fig. 13, b).

6. Supporto cerniera mobile. La reazione è diretta perpendicolarmente al piano di supporto (piano di rotolamento) (Fig. 14, a, b).

7. Cerniera cilindrica (Fig. 15, a), cuscinetto radiale (Fig. 15, b). La reazione passa attraverso il centro della cerniera (il centro della sezione centrale del cuscinetto) e giace su un piano perpendicolare all'asse della cerniera (cuscinetto).
Equivale a due forze di grandezza sconosciuta: i componenti di questa reazione lungo i corrispondenti assi delle coordinate (forze in Fig. 15, a; e in Fig. 15, b). (Per una spiegazione di ciò, vedere anche l'esempio a pagina 16).


8. Cerniera sferica (Fig. 16, a), cuscinetto reggispinta (o cuscinetto a contatto angolare) (Fig. 16, b). La reazione consiste di tre forze di grandezza sconosciuta: le componenti della reazione lungo gli assi del sistema di coordinate spaziali.
9. Guarnizione dura (Fig. 17). Quando su un corpo agisce un sistema piano di forze, la reazione totale dell'ancoraggio è costituita da una forza con componenti XA e UA, e da una coppia di forze con momento M, situate sullo stesso piano delle forze agenti.
10. Guarnizione scorrevole (Fig. 18). Nel caso di un sistema di forze piano e in assenza di attrito, la reazione consiste in una forza N e una coppia di forze con momento M, situate nello stesso piano delle forze agenti. La forza N è perpendicolare alla direzione di scorrimento.



Domande di autotest
1. Cosa si chiama corpo assolutamente rigido, punto materiale?
2. Identificare gli elementi di forza. In che modo puoi impostare la forza?
3. Cos'è il momento della forza vettoriale rispetto a un punto? Cos'è il momento della forza algebrico?
4. In quale caso il momento di una forza rispetto a un punto è uguale a zero?
5. Cos'è chiamato sistema di forze? Quali sistemi di forze sono detti equivalenti?
6. Cos'è chiamato il sistema di forze risultante?
7. Definire una reazione di solido, legame, legame non libero?
8. Un corpo non libero può essere considerato libero?
9. In quali due gruppi si dividono le forze che agiscono su un corpo rigido non libero?

- VKontakte 0
- Google+ 0
- OK 0
- Facebook 0






