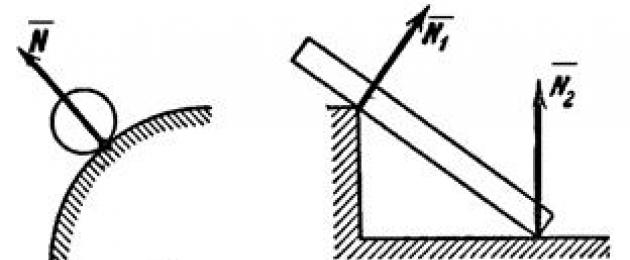
1. Ett slätt plan (yta) eller stöd. En slät yta är en yta på vilken friktionen hos en given kropp kan försummas till en första approximation. En sådan yta hindrar kroppen från att röra sig endast i riktning mot den gemensamma vinkelrät (normal) mot kontaktkropparnas ytor vid kontaktpunkten (fig. 7, A). Därför reaktionen N slät yta eller stöd riktas längs den gemensamma normalen till kontaktkropparnas ytor vid kontaktpunkten och appliceras vid denna punkt. När en av kontaktytorna är en punkt (fig. 7, b), så riktas reaktionen vinkelrätt mot den andra ytan.
Om ytorna inte är släta måste du lägga till en annan kraft - friktionskraft, som är riktad vinkelrätt mot den normala reaktionen i motsatt riktning mot kroppens eventuella glidning.

Ris. 7
2. Tråd. Anslutningen, gjord i form av en flexibel, outtöjbar tråd (fig. 8), ger inte kroppen M flytta bort från trådupphängningspunkten i riktningen A.M.. Därför reaktionen T den spända tråden riktas längs tråden från kroppen till punkten av dess avstängning.

Ris. 8
3. Cylindrisk led (lager). Om två kroppar är förbundna med en bult som går genom hål i dessa kroppar, så kallas en sådan koppling ett gångjärn eller helt enkelt ett gångjärn; Bultens mittlinje kallas gångjärnsaxeln. Kropp AB, fäst med ett gångjärn till stödet D(Fig. 9, A), kan roteras efter önskemål runt gångjärnsaxeln (i ritningsplanet); det här är slutet A kroppen kan inte röra sig i någon riktning vinkelrätt mot gångjärnsaxeln. Därför reaktionen R ett cylindriskt gångjärn kan ha vilken riktning som helst i ett plan vinkelrätt mot gångjärnsaxeln, dvs. i planet A hu. För styrka R i detta fall är inte heller dess modul känd i förväg R, inte heller riktning (vinkel).
4. Kulled och axiallager. Denna typ av anslutning fixerar någon punkt på kroppen så att den inte kan göra några rörelser i rymden. Exempel på sådana anslutningar är kulleden med vilken kameran fästs på stativet (bild 9, b) och ett lager med en tryckkraft (Fig. 9, V). Reaktion R en kulled eller axiallager kan ha vilken riktning som helst i rymden. För det är inte heller reaktionsmodulen känd i förväg R, inte heller de vinklar som den bildar med axlarna x, y, z.

Ris. 9
5. Stång. Låt anslutningen i någon struktur vara en stav AB, fäst i ändarna med gångjärn (fig. 10). Låt oss anta att stavens vikt kan försummas jämfört med den belastning den uppfattar. Då kommer endast två krafter som appliceras vid gångjärnen att verka på stången A Och I. Men om spöet ABär i jämvikt, tillämpas sedan enligt axiom 1 vid punkter A Och I krafterna måste riktas längs en rät linje, dvs längs stavens axel. Följaktligen fungerar en stång belastad i ändarna, vars vikt kan försummas i jämförelse med dessa belastningar, endast i spänning eller kompression. Om en sådan stav är en länk, kommer stavens reaktion att riktas längs stavens axel.

Fig. 10
6. Rörligt gångjärnsstöd (Fig. 11, stöd A) förhindrar att kroppen endast rör sig i riktningen vinkelrät mot stödets glidplan. Reaktionen hos ett sådant stöd riktas vinkelrätt mot den yta på vilken det rörliga stödets rullar vilar.
7. Fast gångjärnsstöd (Fig. 11, stöd I). Reaktionen av ett sådant stöd passerar genom gångjärnsaxeln och kan ha vilken riktning som helst i ritningens plan. När vi löser problem kommer vi att avbilda reaktionen genom dess komponenter och längs koordinataxlarnas riktningar. Om vi, efter att ha löst problemet, finner och , kommer reaktionen också att bestämmas; modulo ![]()

Fig. 11
Fästmetoden som visas i fig. 11 används så att i balken AB inga ytterligare spänningar uppstod när dess längd ändrades på grund av temperaturförändringar eller böjning.
Observera att om stödet A Om strålen (Fig. 11) också görs orörlig, kommer strålen, när något plan kraftsystem verkar på den, att vara statiskt obestämd, eftersom de tre jämviktsekvationerna kommer att omfatta fyra okända reaktioner , , , .
8. Fast klämstöd eller stel inbäddning (Fig. 12). I detta fall verkar ett system av fördelade reaktionskrafter på den inbäddade änden av balken från sidan av stödplanen. Överväger att dessa krafter ska föras till centrum A, vi kan ersätta dem med en i förväg okänd kraft, applicerad i detta centrum, och ett par med ett i förväg okänt ögonblick. Kraft kan i sin tur avbildas av dess komponenter och . För att hitta reaktionen hos ett stationärt klämstöd är det således nödvändigt att bestämma tre okända kvantiteter , och . Om under en sådan stråle någonstans vid en punkt I lägg till ytterligare stöd, strålen blir statiskt obestämd.

Fig. 12
När man bestämmer kopplingsreaktionerna för andra strukturer är det nödvändigt att fastställa om det tillåter rörelse längs tre ömsesidigt vinkelräta axlar och rotation runt dessa axlar. Om den stör någon rörelse, visa motsvarande kraft; om den stör rotationen, visa ett par med motsvarande moment.
Ibland måste man studera jämvikten hos icke-stela kroppar. I det här fallet kommer vi att använda antagandet att om denna icke-styva kropp är i jämvikt under inverkan av krafter, så kan den betraktas som en solid kropp, med alla regler och metoder för statik.
Exempel 1. En horisontell kraft verkar på en viktlös tregångsbåge (fig. 13). Bestäm reaktionens verkningslinje (anslutningsreaktion vid punkten A).
Lösning: Låt oss titta på höger sida av bågen separat. På punkter I Och MED Låt oss tillämpa bindningsreaktionskrafterna och . En kropp under inverkan av två krafter är i jämvikt. Enligt axiomet om två krafters jämvikt är krafterna och lika stora och verkar längs en rät linje i motsatta riktningar. Således vet vi riktningen för kraften (längs linjen Sol).

Ris. 13
Låt oss titta på den vänstra sidan av bågen separat. På punkter A Och MED Låt oss tillämpa bindningsreaktionskrafterna och . Kraft, handling är lika med reaktion. Tre krafter verkar på kroppen, riktningarna för två krafter ( och .) är kända. Enligt trekraftssatsen skär verkningslinjerna för alla tre krafterna varandra i en punkt. Därför riktas kraften längs linjen AD. riktad längs linjen AE.
Sista delen
Kom ihåg att den här lektionen täcker de grundläggande begreppen statik: ett par krafter, ögonblicket för ett par krafter, samband, reaktioner av anslutningar.
Svara på frågor från kadetter.
Ge en uppgift för självförberedelse.
V. Självstudieuppgift
1. Analysera materialet i sammanfattningen.
2. Studera frågorna: huvudproblemet med statik, analytiska villkor för jämvikten i ett godtyckligt kraftsystem.
VI. Litteratur
1. Butenin N.V., Lunts Ya.L., Merkin D.R. Teoretisk kurs
mekanik i 2 volymer. – St Petersburg: Lan, 2008, 736 sid.
2. Yablonsky A.A., Nikiforova V.M. Kurs i teoretisk mekanik. Del 1. Statik. Kinematik. M.: Högre. skola, 2004
3. Tsyvilsky V.L. Teoretisk mekanik. M.: Högre skola, 2004. – 343 sid.
Utvecklad av ____________________________________________________
(signatur, position, efternamn, titel)
"__" ______________2012
FÖRELÄSNINGSKURS OM TEORETISK MEKANIK
Föreläsning 1
Teoretisk mekanik är vetenskapen om de mest allmänna lagarna för mekanisk rörelse och materiella objekts jämvikt.
De grundläggande begreppen och definitionerna av teoretisk mekanik uppstod på grundval av många experiment och observationer av naturfenomen, följt av abstraktion från de specifika förhållandena för varje experiment. I teoretisk mekanik används de ultimata abstraktionerna: en materiell punkt och en absolut stel kropp. Ovanstående abstraktioner gör det möjligt att studera de mest allmänna lagarna för mekanisk rörelse, vilket motsvarar den teoretiska mekanikens huvuduppgift. Teoretisk mekanik är grunden för studier av sådana discipliner som materialstyrka och maskindelar.
Kursen i teoretisk mekanik består av tre delar: statik, kinematik och dynamik.
Statik är en gren av teoretisk mekanik som studerar den statiska jämvikten hos materiella kroppar under påverkan av krafter som appliceras på dem.
Grundläggande begrepp för statik:
1. Om en viss kropp inte rör sig i förhållande till en annan kropp, så sägs den första kroppen vara i ett tillstånd av relativ jämvikt. Den kropp i förhållande till vilken andra kroppars jämvikt beaktas kallas referenskroppen.
2. Varje kropp, under påverkan av krafter som appliceras på den, ändrar sina geometriska dimensioner och form, d.v.s. deformerad. Inom teoretisk mekanik beaktas inte dessa deformationer och endast icke-deformerbara – absolut stela kroppar – beaktas. En kropp kallas absolut solid om avståndet mellan två punkter förblir konstant.
3. Måttet på kropparnas mekaniska samverkan är kraft. Kraft är en vektorstorhet, den kännetecknas av appliceringspunkten, riktningen och storleken (Fig. 1.1). Kraftenheten är newton (N).
4. Uppsättningen krafter som verkar på någon kropp kallas ett kraftsystem. Kraftsystemet betecknas ( , , , … ) – ett system som består av n krafter.
5. Ett balanserat, eller ekvivalent med noll, kraftsystem är ett sådant kraftsystem som, när det appliceras på en fast kropp, inte bryter mot dess tillstånd. Det vill säga, om en viss kropp inte ändrade sin position i förhållande till referenskroppen innan den applicerade ett balanserat kraftsystem, så kommer den inte att ändra det även efter att ha applicerat detta system på den. Ett balanserat kraftsystem betecknas enligt följande: ( , , , … )<=>0 (<=>- likvärdighetstecken).
6. Om ett kraftsystem ( , , , ... ) appliceras på en viss kropp och vi applicerar ett annat kraftsystem ( , , , ... ) på den, så att det tillsammans med det första kommer att bilda ett balanserat kraftsystem. I det här fallet kallas systemet ( , , , …) ett balanserande kraftsystem. Om balanseringssystemet består av en kraft, så kallas denna kraft för balanseringskraften för kraftsystemet (, , , …).
7. Om vart och ett av två kraftsystem ( , , , … ) och ( , , , … ) balanseras av samma kraftsystem ( , , , … ), så är de två första kraftsystemen ekvivalenta med varandra ( , , , …)<=>( , , , … ). Slutsats: att ersätta ett system av krafter som verkar på en kropp med ett system som motsvarar det ändrar inte tillståndet i vilket kroppen befinner sig.
8. Om ett kraftsystem är ekvivalent med en kraft, så kallas denna kraft resultanten av detta kraftsystem.
Statikens axiom
Axiom 1. En fri absolut stel kropp är i jämvikt under inverkan av två krafter om och endast om krafterna verkar längs en rät linje i motsatta riktningar och har lika stora moduler.

Axiom 2. Verkan av ett givet kraftsystem på en absolut stel kropp kommer inte att förändras om ett kraftsystem motsvarande noll läggs till eller kastas från det.
{ , , , … } <=> { , , , … , , , , … };
{ , , , … } <=> 0
| |
| |
Axiom 4. Samverkanskrafterna mellan två kroppar är lika stora och riktade längs en rät linje i motsatta riktningar.
Kroppen kallas fri, om dess rörelser i rymden inte begränsas av någonting. Om begränsningar införs på rörelsen av punkter på kroppen, så kallas kroppen ofri eller relaterade. Materialkroppar som begränsar rörelsen hos en given kropp kallas för förbindelser. Den kraft med vilken en bindning verkar på en given kropp kallas bindningsreaktionen. Kraften verkar på förbindelsen, och kopplingens reaktion verkar på kroppen.
Axiom 5. (Axiom för befrielse från förbindelser). Kroppens balans kommer inte att störas om de anslutningar som påtvingas den ersätts av reaktioner från anslutningarna.
Axiom 6. (Axiom om stelning). Jämvikten hos en deformerbar kropp kommer inte att förändras om ytterligare begränsningar åläggs den eller om den blir helt solid.
Följder från axiomen
Följd 1. En kraft som appliceras på en absolut stel kropp kan överföras till vilken punkt som helst i dess verkningslinje. I det här fallet kommer effekten av kraft på kroppen inte att förändras.
Bevis:
 Låt en kraft som appliceras på en punkt verka på en stel kropp A(Fig. 1.4). Låt oss ansöka någon gång I kraftlinjer F kraftsystem ( , )<=>0, vilket är tillåtet baserat på Axiom 2. Låt oss acceptera = = . Som ett resultat får vi ett kraftsystem ( , , )<=> .
Låt en kraft som appliceras på en punkt verka på en stel kropp A(Fig. 1.4). Låt oss ansöka någon gång I kraftlinjer F kraftsystem ( , )<=>0, vilket är tillåtet baserat på Axiom 2. Låt oss acceptera = = . Som ett resultat får vi ett kraftsystem ( , , )<=> .
Lägg märke till att ( , )<=>0, baserat på axiom 2, kan detta kraftsystem förkastas. Vi får<=>{ , , }<=> .
Slutsats: Kraft är en glidande vektor.
Resultat 2. Satsen om det nödvändiga villkoret för en kropps jämvikt under inverkan av tre icke-parallella krafter som ligger i samma plan.
Om en fri kropp befinner sig i ett tillstånd av jämvikt under inverkan av tre icke-parallella krafter som ligger i samma plan, skärs dessa krafters verkningslinjer vid en punkt.
Bevis:
 Låt tre krafter , , appliceras på kroppen (Fig. 1.5). ( , , )<=>0. Eftersom krafternas verkningslinjer inte är parallella, kommer två av dem (även om ) att skära varandra någon gång HANDLA OM. Låt oss flytta F 1 och F 2 till punkten HANDLA OM och ersätt dessa krafter med den resulterande. Vi får ( , , )<=>( , ), och för att kroppen ska vara i jämvikt måste följande villkor vara uppfyllt: = , och de måste vara riktade längs en rät linje i motsatta riktningar. Det vill säga kraftens verkningslinje måste passera genom skärningspunkten mellan krafternas verkningslinjer och.
Låt tre krafter , , appliceras på kroppen (Fig. 1.5). ( , , )<=>0. Eftersom krafternas verkningslinjer inte är parallella, kommer två av dem (även om ) att skära varandra någon gång HANDLA OM. Låt oss flytta F 1 och F 2 till punkten HANDLA OM och ersätt dessa krafter med den resulterande. Vi får ( , , )<=>( , ), och för att kroppen ska vara i jämvikt måste följande villkor vara uppfyllt: = , och de måste vara riktade längs en rät linje i motsatta riktningar. Det vill säga kraftens verkningslinje måste passera genom skärningspunkten mellan krafternas verkningslinjer och.
Föreläsning 2
Typer av samband och deras reaktioner
När man löser tekniska problem blir det nödvändigt att söka efter reaktioner av olika samband. Den allmänna regeln som bör tillämpas är följande: om rörelsen för någon punkt på kroppen är begränsad, bör reaktionen appliceras vid denna punkt i motsatt riktning mot den riktning i vilken rörelsen är begränsad.
Huvudtyper av anslutningar:
1. Slät yta eller stöd. En yta på vilken friktion kan försummas anses vara slät. Reaktionen av en slät yta reduceras endast till reaktionen riktad längs den allmänna normalen till kontaktytorna, under antagandet att denna normal existerar (Fig. 2.1.a). Om det inte finns någon gemensam normal, det vill säga en av ytorna har en hörnpunkt eller en "punkt", riktas reaktionen längs normalen till den andra ytan (fig. 2.1.b).
3.  Flexibel kommunikation. Denna typ av anslutning inkluderar anslutningar gjorda med hjälp av en kedja, kabel, rep, etc. Reaktionen av en sådan anslutning är alltid riktad längs anslutningen (fig. 2.3).
Flexibel kommunikation. Denna typ av anslutning inkluderar anslutningar gjorda med hjälp av en kedja, kabel, rep, etc. Reaktionen av en sådan anslutning är alltid riktad längs anslutningen (fig. 2.3).
4. Cylindriskt gångjärn (Fig. 2.4) och lager (stöd B i Fig. 2.5). Ett cylindriskt gångjärn är en förbindelse mellan två eller flera kroppar med hjälp av en cylindrisk stång, den så kallade tappen, insatt i hål i dessa kroppar. Det cylindriska gångjärnet förhindrar rörelse i alla riktningar i XOY-planet. Reaktionen av ett fast cylindriskt gångjärn (gångjärnsfixerat stöd) representeras i form av okända komponenter och , vars handlingslinjer är parallella eller sammanfaller med koordinataxlarna (Fig. 2.4).
5. Trycklager (stöd A, Fig. 2.5) och sfäriskt gångjärn (Fig. 2.6). Denna typ av anslutning kan representeras i form av en stång med en sfärisk yta i änden, som är fäst vid ett stöd, som är en del av en sfärisk hålighet. Ett sfäriskt gångjärn förhindrar rörelse i alla riktningar i rymden, så dess reaktion representeras i form av tre komponenter, , , , parallella med motsvarande koordinataxlar.
6. 
 |
Ledbart och rörligt stöd. Denna typ av anslutning är strukturellt gjord i form av ett cylindriskt gångjärn som kan röra sig fritt längs ytan. Reaktionen hos det ledade rörliga stödet är alltid riktat vinkelrätt mot stödytan (stöd A i fig. 2.7).
7. Gångjärnsfast stöd. Reaktionen av ett gångjärnsfixerat stöd representeras i form av okända komponenter och , vars verkningslinjer är parallella eller sammanfaller med koordinataxlarna (stöd B i fig. 2.7).
8. En viktlös stång (rak eller böjd), fäst i ändarna med gångjärn. Reaktionen hos en sådan stång är bestämd och riktad längs linjen som förbinder gångjärnens mittpunkter (Fig. 2.8).

9. Hård tätning. Detta är en ovanlig typ av anslutning, eftersom den styva tätningen förutom att förhindra rörelse i XOY-planet förhindrar rotation av stången (balken) i förhållande till spetsen A. Därför reduceras kopplingsreaktionen inte bara till reaktionen R (R a x, R a y), utan även till det reaktiva momentet M pa (Fig. 2.9).
Kroppen kallas fri, om hans rörelser inte begränsas av något. En kropp vars rörelse begränsas av andra kroppar kallas ofri . Kroppar som begränsar en viss kropps rörelse kallas anslutningar . De krafter med vilka bindningar verkar på en given kropp kallas reaktioner av anslutningar .
Principen om befrielse: vilken icke-fri kropp som helst kan betraktas som fri om bindningarnas verkan ersätts av dem med reaktioner som appliceras på kroppen.
Grundläggande typer av anslutningar:
A) stöd på en idealiskt slät yta - ytans reaktion riktas normalt mot den, d.v.s. vinkelrät mot tangenten - normal reaktion;
b) en av kontaktytorna är en punkt (vinkel), reaktionen är riktad vinkelrätt mot den andra ytan;
V) tråd - reaktionen riktas längs tråden till suspensionspunkten;
G) cylindriskt gångjärn (gångjärnsfixerat stöd) - reaktionen kan ha vilken riktning som helst i planet, när man löser problem ersätts den av två ömsesidigt vinkelräta komponenter;
d) cylindriskt ledat rörligt stöd (gångjärn på rullar) - reaktionen riktas vinkelrätt mot stödplanet;
e) viktlös stav (nödvändigtvis viktlös) - reaktionen riktas längs staven;
och) stel inbäddning (balk inbäddad i väggen) - en godtyckligt riktad reaktion inträffar - kraft och reaktivt moment, också okänt i riktning. Reaktionen är uppdelad i två komponenter.
3. Projektion av kraft på axeln och planet
Projektionen av en kraft på en axel är en algebraisk storhet lika med produkten av kraftmodulen och cosinus för vinkeln mellan kraften och axelns positiva riktning. Om denna vinkel är spetsig är projektionen positiv, om den är trubbig är den negativ, och om kraften är vinkelrät mot axeln är dess projektion på axeln noll.
Projektion av kraft på ett plan Ohoo kallas vektorn som är innesluten mellan projektionerna av början och slutet av kraften på detta plan. .
Krafter kan specificeras inte bara med hjälp av vektorer, utan också analytiskt, med kraftprojektioner på koordinataxlar. Vi använder rätt koordinatsystem, d.v.s. en där den kortaste axelinriktningen Oxe c Oj inträffar sett från den positiva änden av axeln Uns, moturs.
För det rumsliga systemet: ,
Fx =Fcosa; Fy =Fcosb; Fz =Fcosg;
4. Tillsats av krafter
Geometrisk metod för att addera krafter
1. Tillägg av två krafter.
Den geometriska summan av två krafter hittas av parallellogramregeln eller genom att konstruera en krafttriangel som visar en av halvorna av detta parallellogram.
2. Addering av tre krafter som inte ligger i samma plan.
Den geometriska summan av tre krafter , , , som inte ligger i samma plan representeras av diagonalen av en parallellepiped byggd på dessa krafter (parallellepipedregel). Vi är övertygade om giltigheten av detta genom att konsekvent tillämpa parallellogramregeln.
3. Tillägg av ett kraftsystem.
Den geometriska summan (huvudvektorn) av vilket kraftsystem som helst bestäms antingen av den sekventiella additionen av systemets krafter enligt parallellogramregeln eller genom konstruktionen av en kraftpolygon. Den andra metoden är enklare och bekvämare. För att hitta summan av krafter , , , …, med den här metoden, plottar vi från en godtycklig punkt en vektor som representerar kraften på en vald skala, från en punkt en vektor som representerar kraften, från en punkt en vektor som representerar kraften, etc. .; från slutet av den näst sista vektorn lägger vi bort vektorn som representerar . Genom att koppla ihop början av den första vektorn med slutet av den sista får vi en vektor som representerar den geometriska summan eller huvudvektorn för de krafter som adderas: .
Analytisk metod för att addera krafter.
Krafter kan också adderas analytiskt med hjälp av projektioner av dessa krafter på koordinataxlar. I detta fall är projektionen av summavektorn på valfri axel lika med den algebraiska summan av projektionerna av termerna på samma axel. -> R x =åF ix ; R y =åF iy ; Rz =åF iz; .
Om krafterna är placerade i samma plan, då R x =åF ix; R y =åF iy ; .
5. Jämvikt hos ett system av konvergerande krafter
Konvergerande kallas krafter vars verkningslinjer skär varandra vid en punkt. Resulterande jag av konvergerande krafter är lika med den geometriska summan (huvudvektor) av dessa krafter och appliceras vid skärningspunkten. För jämvikten hos ett system av konvergerande krafter som appliceras på en fast kropp är det nödvändigt och tillräckligt att resultanten av dessa krafter är lika med noll
1. Geometriskt jämviktstillstånd . För att ett system av konvergerande krafter ska vara i jämvikt är det nödvändigt och tillräckligt att kraftpolygonen som är konstruerad av dessa krafter sluts.
2. Analytiska jämviktsförhållanden . ó , , .
Följaktligen, för jämvikten i ett rumsligt system av konvergerande krafter, är det nödvändigt och tillräckligt att summan av projektionerna av dessa krafter på var och en av de tre koordinataxlarna är lika med noll. åF ix =0; åF iy =0; åF iz =0. För ett platt system, endast de två första ekvationerna.
3. Tre krafters sats : Om en stel kropp är i jämvikt under inverkan av tre icke-parallella krafter som ligger i samma plan, skärs dessa krafters verkningslinjer vid en punkt.
För att bevisa satsen, överväg först några två av de krafter som verkar på kroppen, till exempel och . Eftersom dessa krafter enligt satsens villkor ligger i samma plan och inte är parallella, skär deras verkningslinjer vid någon punkt A. Låt oss applicera krafterna vid denna punkt och ersätta dem med resultanten
Denna publikation hjälper dig att systematisera tidigare förvärvade kunskaper, samt förbereda dig för ett prov eller test och klara det framgångsrikt.
* * *
litervis företag.
2. Anslutningar och reaktioner av anslutningar
Alla kroppar är indelade i fri och bunden.
Fria kroppar– Det här är kroppar vars rörelse inte är begränsad.
Bundna kroppar- Dessa är kroppar vars rörelse begränsas av andra kroppar.
Kroppar som begränsar andra kroppars rörelse kallas anslutningar.
De krafter som verkar från anslutningar och förhindrar rörelse kallas reaktioner av anslutningar. Kommunikationsreaktionen riktas alltid från den sida där den inte kan flyttas.
Vilken bunden kropp som helst kan föreställas som fri om bindningarna ersätts av reaktioner (principen om befrielse från band).
Anslutningar är indelade i flera typer.
Anslutning – smidigt stöd(utan friktion) - stödreaktionen appliceras vid stödpunkten och är alltid riktad vinkelrätt mot stödet.
Flexibel kommunikation(tråd, rep, kabel, kedja) – lasten är upphängd i två gängor. Trådens reaktion riktas längs tråden bort från kroppen, och tråden kan bara sträckas.
Hård spö– stången kan komprimeras eller sträckas. Reaktionen av staven riktas längs staven. Staven arbetar i spänning eller kompression. Den exakta riktningen för reaktionen bestäms genom att mentalt ta bort staven och överväga möjliga rörelser av kroppen utan denna koppling.
Eventuell flytt punkt kallas en sådan infinitesimal mental rörelse som är tillåten vid ett givet ögonblick.
Artikulerat stöd. Gångjärnet tillåter rotation runt fästpunkten. Det finns två typer av gångjärn.
Rörligt gångjärn. Stången som är fäst vid gångjärnet kan rotera runt gångjärnet, och fästpunkten kan röra sig längs styrningen (plattformen). Det rörliga gångjärnets reaktion är riktad vinkelrätt mot stödytan, eftersom endast rörelse över stödytan inte är tillåten.
Fast gångjärn. Fästpunkten kan inte flyttas.
Stången kan rotera fritt runt gångjärnsaxeln. Reaktionen av ett sådant stöd passerar genom gångjärnsaxeln, men dess riktning är okänd. Det är avbildat som två komponenter: horisontell och vertikal ( R x , R y).
Nypning, eller "tätning". Någon förflyttning av fästpunkten är inte möjlig.
Under påverkan av yttre krafter uppstår en reaktiv kraft och ett reaktivt moment i stödet M z, förhindrar rotation.
Den reaktiva kraften representeras som två komponenter längs koordinataxlarna:
R = R x + R y .
* * *
Det givna inledande fragmentet av boken Teknisk mekanik. Spjälsäng (Aurika Lukovkina, 2009) tillhandahålls av vår bokpartner -
1. Slät (friktionsfri) plan eller yta. Sådana anslutningar förhindrar att kroppen endast rör sig i riktning mot det vanliga normala vid kontaktpunkten, längs vilken motsvarande reaktion kommer att riktas. Därför är reaktionen av ett slätt platt stöd vinkelrätt mot detta stöd (reaktion i fig. 12,a); reaktionen av en slät vägg är vinkelrät mot denna vägg Fig. 12, b); reaktionen av en slät yta riktas längs normalen till denna yta, ritad vid kontaktpunkten i fig. 12, c).

2. Skarpt utsprång. I det här fallet kan vi anta att själva utsprånget stöds, och kroppen i fråga fungerar som ett stöd. Detta leder till fall 1 och slutsatsen att reaktionen av ett slätt utsprång är riktat vinkelrätt mot ytan av stödkroppen (kraft i fig. 12, c).
3. Flexibel anslutning (viktlös tråd, kabel, kedja, etc.). Motsvarande reaktion riktas längs anslutningen från fästpunkten för gängan till upphängningspunkten (kraft i fig. 11, d, kraft i fig. 12, b).
4. Viktlös rak stav med gångjärn i ändarna. Reaktionen riktas längs staven. Eftersom stången kan vara antingen sammanpressad eller sträckt, kan reaktionen riktas både mot stångens upphängningspunkt och bort från upphängningspunkten (reaktioner i fig. 13, a).
5. Viktlös eller krökt stång. Reaktionen riktas längs en rät linje som passerar genom mitten av ändgångjärnen (kraft 53 i fig. 13, a; kraft S i fig. 13, b).

6. Rörligt gångjärnsstöd. Reaktionen riktas vinkelrätt mot stödplanet (rullningsplanet) (fig. 14, a, b).

7. Cylindriskt gångjärn (fig. 15, a), radiallager (fig. 15, b). Reaktionen passerar genom mitten av gångjärnet (mitten av lagrets mittsektion) och ligger i ett plan vinkelrätt mot gångjärnets (lagrets) axel.
Det motsvarar två krafter som är okända i storlek - komponenterna i denna reaktion längs motsvarande koordinataxlar (krafter i fig. 15, a; och i fig. 15, b). (För en förklaring av detta, se även exemplet på sidan 16).


8. Sfäriskt gångjärn (Fig. 16, a), axiallager (eller vinkelkontaktlager) (Fig. 16, b). Reaktionen består av tre krafter som är okända i storlek - reaktionens komponenter längs det rumsliga koordinatsystemets axlar.
9. Hård tätning (Fig. 17). När ett plan kraftsystem verkar på en kropp, består den totala reaktionen av inbäddningen av en kraft med komponenterna XA och UA, och ett kraftpar med ett moment M, belägna i samma plan som de verkande krafterna.
10. Glidtätning (Fig. 18). Vid ett plan kraftsystem och frånvaro av friktion består reaktionen av en kraft N och ett kraftpar med ett moment M, belägna i samma plan som de verkande krafterna. Kraften N är vinkelrät mot glidriktningen.



Självtestfrågor
1. Vad kallas en absolut stel kropp, en materiell punkt?
2. Identifiera kraftens element. På vilka sätt kan du ställa in kraften?
3. Vad kallas vektorkraftmomentet i förhållande till en punkt?Vad är det algebraiska kraftmomentet?
4. I vilket fall är momentet för en kraft i förhållande till en punkt lika med noll?
5. Vad kallas ett kraftsystem? Vilka kraftsystem kallas ekvivalenta?
6. Vad kallas det resulterande kraftsystemet?
7. Definiera en icke-fri fast substans, bindning, bindningsreaktion?
8. Kan en icke-fri kropp anses vara fri?
9. Vilka två grupper verkar krafter på en icke-fri stel kropp indelad i?

- I kontakt med 0
- Google+ 0
- OK 0
- Facebook 0






