ОПРЕДЕЛЕНИЕ
Устойчивое равновесие - это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, возвращается в прежнее положение.
Это происходит, если при небольшом смещении тела в любом направлении от первоначального положения равнодействующая сил, действующих на тело, становится отличной от нуля и направлена к положению равновесия. Например, шарик, лежащий на дне сферического углубления (рис.1 а).
ОПРЕДЕЛЕНИЕ
Неустойчивое равновесие - это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, будет еще больше отклоняться от положения равновесия.
В данном случае при небольшом смещении тела из положения равновесия равнодействующая приложенных к нему сил отлична от нуля и направлена от положения равновесия. Примером может служить шарик, находящийся в верхней точке выпуклой сферической поверхности (ри.1 б).
ОПРЕДЕЛЕНИЕ
Безразличное равновесие - это равновесие, при котором тело, выведенное из положения равновесия и предоставленное самому себе, не меняет своего положения (состояния).
В этом случае при небольших смещениях тела из первоначального положения равнодействующая приложенных к телу сил остается равной нулю. Например, шарик, лежащий на плоской поверхности (рис.1,в).
Рис.1. Различные типы равновесия тела на опоре: а) устойчивое равновесие; б) неустойчивое равновесие; в) безразличное равновесие.
Статическое и динамическое равновесие тел
Если в результате действия сил тело не получает ускорения, оно может находиться в состоянии покоя или двигаться равномерно прямолинейно. Поэтому можно говорить о статическом и динамическом равновесии.
ОПРЕДЕЛЕНИЕ
Статическое равновесие - это такое равновесие, когда под действием приложенных сил тело находится в состоянии покоя.
Динамическое равновесие - это такое равновесие, когда по действием сил тело не изменяет своего движения.
В состоянии статического равновесия находится подвешенный на тросах фонарь, любое строительное сооружение. В качестве примера динамического равновесия можно рассматривать колесо, которое катится по плоской поверхности при отсутствии сил трения.
Следует, что если геометрическая сумма всех внешних сил, приложенных к телу, равна нулю, то тело находится в состоянии покоя или совершает равномерное прямолинейное движение. В этом случае принято говорить, что силы, приложенные к телу, уравновешивают друг друга. При вычислении равнодействующей все силы, действующие на тело, можно прикладывать к центру масс.
Чтобы невращающееся тело находилось в равновесии, необходимо, чтобы равнодействующая всех сил, приложенных к телу, была равна нулю.
${\overrightarrow{F}}={\overrightarrow{F_1}}+{\overrightarrow{F_2}}+...= 0$
Если тело может вращаться относительно некоторой оси, то для его равновесия недостаточно равенства нулю равнодействующей всех сил.
Вращающее действие силы зависит не только от ее величины, но и от расстояния между линией действия силы и осью вращения.
Длина перпендикуляра, проведенного от оси вращения до линии действия силы, называется плечом силы.
Произведение модуля силы $F$ на плечо d называется моментом силы M. Положительными считаются моменты тех сил, которые стремятся повернуть тело против часовой стрелки.
Правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
В общем случае, когда тело может двигаться поступательно и вращаться, для равновесия необходимо выполнение обоих условий: равенство нулю равнодействующей силы и равенство нулю суммы всех моментов сил. Оба эти условия не являются достаточными для покоя.
Рисунок 1. Безразличное равновесие. Качение колеса по горизонтальной поверхности. Равнодействующая сила и момент сил равны нулю
Катящееся по горизонтальной поверхности колесо -- пример безразличного равновесия (рис. 1). Если колесо остановить в любой точке, оно окажется в равновесном состоянии. Наряду с безразличным равновесием в механике различают состояния устойчивого и неустойчивого равновесия.
Состояние равновесия называется устойчивым, если при малых отклонениях тела от этого состояния возникают силы или моменты сил, стремящиеся возвратить тело в равновесное состояние.
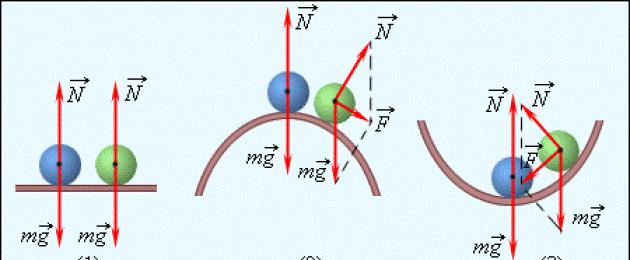
При малом отклонении тела из состояния неустойчивого равновесия возникают силы или моменты сил, стремящиеся удалить тело от положения равновесия. Шар, лежащий на плоской горизонтальной поверхности, находится в состоянии безразличного равновесия.

Рисунок 2. Различные виды равновесия шара на опоре. (1) -- безразличное равновесие, (2) -- неустойчивое равновесие, (3) -- устойчивое равновесие
Шар, находящийся в верхней точке сферического выступа, -- пример неустойчивого равновесия. Наконец, шар на дне сферического углубления находится в состоянии устойчивого равновесия (рис. 2).
Для тела, имеющего неподвижную ось вращения, возможны все три вида равновесия. Безразличное равновесие возникает, когда ось вращения проходит через центр масс. При устойчивом и неустойчивом равновесии центр масс находится на вертикальной прямой, проходящей через ось вращения. При этом, если центр масс находится ниже оси вращения, состояние равновесия оказывается устойчивым. Если же центр масс расположен выше оси -- состояние равновесия неустойчиво (рис. 3).

Рисунок 3. Устойчивое (1) и неустойчивое (2) равновесие однородного круглого диска, закрепленного на оси O; точка C -- центр массы диска; ${\overrightarrow{F}}_т\ $-- сила тяжести; ${\overrightarrow{F}}_{у\ }$-- упругая сила оси; d -- плечо
Особым случаем является равновесие тела на опоре. В этом случае упругая сила опоры приложена не к одной точке, а распределена по основанию тела. Тело находится в равновесии, если вертикальная линия, проведенная через центр масс тела, проходит через площадь опоры, т. е. внутри контура, образованного линиями, соединяющими точки опоры. Если же эта линия не пересекает площадь опоры, то тело опрокидывается.
Задача 1
Наклонная плоскость наклонена под углом 30o к горизонту (рис. 4). На ней находится тело Р, масса которого m=2 кГ. Трением можно пренебречь. Нить, перекинутая через блок, составляет угол 45o с наклонной плоскостью. При каком весе груза Q тело Р будет в равновесии?

Рисунок 4
Тело находится под действием трех сил: силы тяжести Р, натяжения нити с грузом Q и силы упругости F со стороны плоскости, давящей на него в направлении, перпендикулярном к плоскости. Разложим силу Р на составляющие: $\overrightarrow{Р}={\overrightarrow{Р}}_1+{\overrightarrow{Р}}_2$. Условие ${\overrightarrow{P}}_2=$ Для равновесия, учитывая удвоение усилия подвижным блоком, необходимо, чтобы $\overrightarrow{Q}=-{2\overrightarrow{P}}_1$. Отсюда условие равновесия: $m_Q=2m{sin \widehat{{\overrightarrow{P}}_1{\overrightarrow{P}}_2}\ }$. Подставляя значения получим: $m_Q=2\cdot 2{sin \left(90{}^\circ -30{}^\circ -45{}^\circ \right)\ }=1,035\ кГ$.
При ветре привязной аэростат висит не над той точкой Земли, к которой прикреплен трос (рис. 5). Натяжение троса составляет 200 кГ, угол с вертикалью а=30${}^\circ$. Какова сила давления ветра?
\[{\overrightarrow{F}}_в=-{\overrightarrow{Т}}_1;\ \ \ \ \left|{\overrightarrow{F}}_в\right|=\left|{\overrightarrow{Т}}_1\right|=Тg{sin {\mathbf \alpha }\ }\] \[\left|{\overrightarrow{F}}_в\right|=\ 200\cdot 9.81\cdot {sin 30{}^\circ \ }=981\ Н\]

В данной лекции рассматриваются следующие вопросы:
1. Условия равновесия механических систем.
2. Устойчивость равновесия.
3. Пример определения положений равновесия и исследования их устойчивости.
Изучение данных вопросов необходимо для изучения колебательных движений механической системы относительно положения равновесия в дисциплине «Детали машин», для решения задач в дисциплинах «Теория машин и механизмов» и «Сопротивление материалов».
Важным случаем движения механических систем является их колебательное движение. Колебания - это повторяющиеся движения механической системыотносительно некоторого ее положения, происходящие более или менее регулярно во времени. В курсовой работе рассматривается колебательное движение механической системы относительно положения равновесия (относительного или абсолютного).
Механическая система может совершать колебания в течение достаточно длительного промежутка времени только вблизи положения устойчивого равновесия. Поэтому перед тем, как составить уравнения колебательного движения, надо найти положения равновесия и исследовать их устойчивость.
Условия равновесия механических систем.
Согласно принципу возможных перемещений (основному уравнению статики), для того, чтобы механическая система, на которую наложены идеальные, стационарные, удерживающие и голономные связи, находилась в равновесии, необходимо и достаточно, чтобы в этой системе были равны нулю все обобщенные силы:
где - обобщенная сила, соответствующая j - ой обобщенной координате;
s - число обобщенных координат в механической системе.
Если для исследуемой системы были составлены дифференциальные уравнения движения в форме уравнений Лагранжа II - го рода, то для определения возможных положений равновесия достаточно приравнять обобщенные силы нулю и решить полученные уравнения относительно обобщенных координат.
Если механическая система находится в равновесии в потенциальном силовом поле, то из уравнений (1) получаем следующие условия равновесия:
Следовательно, в положении равновесия потенциальная энергия имеет экстремальное значение. Не всякое равновесие, определяемое вышеприведенными формулами, может быть реализовано практически. В зависимости от поведения системы при отклонении от положения равновесия говорят об устойчивости или неустойчивости данного положения.
Устойчивость равновесия
Определение понятия устойчивости положения равновесия было дано в конце XIX века в работах русского ученого А. М. Ляпунова. Рассмотрим это определение.
Для упрощения выкладок условимся в дальнейшем обобщенные координаты q 1 , q 2 ,..., q s отсчитывать от положения равновесия системы:
где
Положение равновесия называется устойчивым, если для любого сколь угодно малого числа можно найти такое другое число , что в том случае, когда начальные значения обобщенных координат и скоростей не будут превышать :
значения обобщенных координат и скоростей при дальнейшем движении системы не превысят .
Иными словами, положение равновесия системы q 1 = q 2 = ...= q s = 0 называется устойчивым , если всегда можно найти такие достаточно малые начальные значения , при которыхдвижение системы не будет выходить из любой заданной сколь угодно малой окрестности положения равновесия . Для системы с одной степенью свободы устойчивое движение системы можно наглядно изобразить в фазовой плоскости (рис.1). Для устойчивого положения равновесия движение изображающей точки, начинающееся в области [ ] , не будет в дальнейшем выходить за пределы области .

Рис.1
Положение равновесия называется асимптотически устойчивым , если с течением времени система будет приближатьсякположению равновесия, то есть
Определение условий устойчивости положения равновесия представляет собой достаточно сложную задачу, поэтому ограничимся простейшим случаем: исследованием устойчивости равновесия консервативных систем .
Достаточные условия устойчивости положений равновесия для таких системопределяются теоремой Лагранжа - Дирихле : положение равновесия консервативной механической системы устойчиво, если в положении равновесия потенциальная энергия системы имеет изолированный минимум .
Потенциальная энергия механической системы определяется с точностью до постоянной. Выберем эту постоянную так, чтобы в положении равновесия потенциальная энергия равнялась нулю:
П (0)=0.
Тогда для системы с одной степенью свободы достаточным условием существования изолированного минимума, наряду с необходимым условием (2), будет условие
Так как в положении равновесия потенциальная энергия имеет изолированный минимум и П (0)=0, то в некоторой конечной окрестности этого положения
П (q )=0.
Функции, имеющие постоянный знак и равные нулю только при нулевых значениях всех своих аргументов, называются знакоопределенными . Следовательно, для того, чтобы положение равновесия механической системы было устойчивым необходимо и достаточно, чтобы в окрестности этого положения потенциальная энергия была положительно определенной функцией обобщенных координат.
Для линейных систем и для систем, которые можно свести к линейным при малых отклонениях от положения равновесия (линеаризовать), потенциальную энергию можно представить в виде квадратичной формы обобщенных координат

где - обобщенные коэффициенты жесткости.
Обобщенные коэффициенты являются постоянными числами, которые могут быть определены непосредственно из разложения потенциальной энергии в ряд или по значениям вторых производных от потенциальной энергии по обобщенным координатам в положении равновесия:
Из формулы (4) следует, что обобщенные коэффициенты жесткости симметричны относительно индексов
Для того, чтобы выполнялись достаточные условия устойчивости положения равновесия, потенциальная энергия должна быть положительно определенной квадратичной формой своих обобщенных координат.
В математике существует критерий Сильвестра , дающий необходимые и достаточные условия положительной определенности квадратичных форм: квадратичная форма (3) будет положительно определенной, если определитель, составленный из ее коэффициентов, и все его главные диагональные миноры будут положительными, т.е. если коэффициенты будут удовлетворять условиям
![]()
.....

В частности, для линейной системы с двумя степенями свободы потенциальная энергия и условия критерия Сильвестра будут иметь вид
Аналогичным образом можно провести исследование положений относительного равновесия, если вместо потенциальной энергии ввести в рассмотрение потенциальную энергию приведенной системы.
П ример определения положений равновесия и исследования их устойчивости

Рис.2
Рассмотрим механическую систему, состоящую из трубки AB , которая стержнем OO 1 соединена с горизонтальной осью вращения, и шарика, который перемещается по трубке без тренияи связан с точкой A трубки пружиной (рис.2). Определим положения равновесия системы и оценим их устойчивость при следующих параметрах: длина трубки l 2 = 1 м, длина стержня l 1 = 0,5 м. длина недеформированной пружины l 0 = 0,6 м , жесткость пружины c = 100 Н/м. Масса трубки m 2 = 2 кг, стержня - m 1 = 1 кг и шарика - m 3 = 0,5 кг. Расстояние OA равно l 3 = 0,4 м.
Запишем выражение для потенциальной энергии рассматриваемой системы. Она складывается из потенциальной энергии трех тел, находящихся в однородном поле силы тяжести, и потенциальной энергии деформированной пружины.
Потенциальная энергия тела в поле силы тяжести равна произведению веса тела на высоту его центра тяжести над плоскостью, в которой потенциальная энергия считается равной нулю. Пусть потенциальная энергия равна нулю в плоскости, проходящей через ось вращения стержня OO 1 , тогда для сил тяжести
Для силы упругости потенциальная энергия определяется величиной деформации
![]()
Найдем возможные положения равновесия системы. Значения координат в положениях равновесия есть корни следующей системы уравнений.

Подобную систему уравнений можно составить для любой механической системы с двумя степенями свободы. В некоторых случаях можно получить точное решение системы. Для системы (5) такого решения не существует, поэтому корни надо искать с помощью численных методов.
Решая систему трансцендентных уравнений (5), получаем два возможных положения равновесия:
Для оценки устойчивости полученных положений равновесия найдем все вторые производные от потенциальной энергии по обобщенным координатам и по ним определим обобщенные коэффициенты жесткости.
![]()
Тело находится в состоянии покоя (или движется равномерно и прямолинейно), если векторная сумма всех сил, действующих на него, равна нулю. Говорят, что силы уравновешивают друг друга. Когда мы имеем дело с телом определенной геометрической формы, при вычислении равнодействующей силы можно все силы прикладывать к центру масс тела.
Условие равновесия тел
Чтобы тело, которое не вращается, находилось в равновесии, необходимо, чтобы равнодействующая всех сил, действующий на него, была равна нулю.
F → = F 1 → + F 2 → + . . + F n → = 0 .
На рисунке выше изображено равновесие твердого тела. Брусок находится в состоянии равновесия под действием трех действующих не него сил. Линии действия сил F 1 → и F 2 → пересекаются в точке O . Точка приложения силы тяжести - центр масс тела C . Данные точки лежат на одной прямой, и при вычислении равнодействующей силы F 1 → , F 2 → и m g → приводятся к точке C .
Условия равенства нулю равнодействующей всех сил недостаточно, если тело может вращаться вокруг некоторой оси.
Плечом силы d называется длина перпендикуляра, проведенного от линии действия силы к точке ее приложения. Момент силы M - произведение плеча силы на ее модуль.
Момент силы стремится повернуть тело вокруг оси. Те моменты, которые поворачивают тело против часовой стрелки, считаются положительными. Единица измерения момента силы в международной системе CИ - 1 Н ь ю т о н м е т р.
Определение. Правило моментов
Если алгебраическая сумма всех моментов, приложенных к телу относительно неподвижной оси вращения, равна нулю, то тело находится в состоянии равновесия.
M 1 + M 2 + . . + M n = 0

Важно!
В общем случае для равновесия тел необходимо выполнение двух условий: равенство нулю равнодействующей силы и соблюдение правила моментов.
В механике есть разные виды равновесия. Так, различают устойчивое и неустойчивое, а также безразличное равновесие.

Типичный пример безразличного равновесия - катящееся колесо (или шар), которое, если остановить его в любой точке, окажется в состоянии равновесия.
Устойчивое равновесие - такое равновесие тела, когда при его малых отклонениях возникают силы или моменты сил, которые стремятся вернуть тело в равновесное состояние.
Неустойчивое равновесие - состояние равновесия, при малом отклонении от которого силы и моменты сил стремятся вывести тело из равновесия еще больше.

На рисунке выше положение шара (1) - безразличное равновесие, (2) - неустойчивое равновесие, (3) - устойчивое равновесие.
Тело с неподвижной осью вращения может находится в любом из описанных положений равновесия. Если ось вращения проходит через центр масс, возникает безразличное равновесие. При устойчивом и неустойчивом равновесии центр масс располагается на вертикальной прямой, которая проходит через ось вращения. Когда центр масс находится ниже оси вращения, равновесие является устойчивым. Иначе - наоборот.

Особый случай равновесия - равновесие тела на опоре. При этом упругая сила распределяется по всему основанию тела, а не проходит через одну точку. Тело покоится в равновесии, когда вертикальная линия, проведенная через центр масс, пересекает площадь опоры. Иначе, если линия из центра масс не попадает в контур, образованный линиями, соединяющими точки опоры, тело опрокидывается.
Пример равновесия тела на опоре - знаменитая Пизанская башня. По легенде с нее сбрасывал шары Галилео Галилей, когда проводил свои опыты по изучению свободного падения тел.

Линия, проведенная из центра масс башни пересекает основание приблизительно в 2,3 м от его центра.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Класс: 10
Презентация к уроку






























 Назад
Вперёд
Назад
Вперёд
Внимание! Предварительный просмотр слайдов используется исключительно в ознакомительных целях и может не давать представления о всех возможностях презентации. Если вас заинтересовала данная работа, пожалуйста, загрузите полную версию.
Цели урока: Изучить состояние равновесия тел, познакомиться с различными видами равновесия; выяснить условия, при которых тело находится в равновесии.
Задачи урока:
- Учебные: Изучить два условия равновесия, виды равновесия (устойчивое, неустойчивое, безразличное). Выяснить, при каких условиях тела более устойчивы.
- Развивающие: Способствовать развитию познавательного интереса к физике. Развитие навыков сравнивать, обобщать, выделять главное, делать выводы.
- Воспитательные: Воспитывать внимание, умения высказывать свою точку зрения и отстаивать её, развивать коммуникативные способности учащихся.
Тип урока: урок изучения нового материала с компьютерной поддержкой.
Оборудование:
- Диск «Работа и мощность» из «Электронных уроков и тестов.
- Таблица «Условия равновесия».
- Призма наклоняющаяся с отвесом.
- Геометрические тела: цилиндр, куб, конус и т.д.
- Компьютер, мултимедиапроектор, интерактивная доска или экран.
- Презентация.
Ход урока
Сегодня на уроке мы узнаем, почему подъёмный кран не падает, почему игрушка «Ванька-встанька» всегда возвращается в исходное состояние, почему Пизанская башня не падает?
I. Повторение и актуализация знаний.
- Сформулировать первый закон Ньютона. О каком состоянии говорится в законе?
- На какой вопрос отвечает второй закон Ньютона? Формула и формулировка.
- На какой вопрос отвечает третий закон Ньютона? Формула и формулировка.
- Что называется равнодействующей силой? Как она находится?
- Из диска «Движение и взаимодействие тел» выполнить задание № 9 «Равнодействующая сил с разными направлениями» (правило сложения векторов (2, 3 упражнения)).
II. Изучение нового материала.
1. Что называется равновесием?
Равновесие – это состояние покоя.
2. Условия равновесия. (слайд 2)
а) Когда тело находится в покое? Из какого закона это следует?
Первое условие равновесия: Тело находится в равновесии, если геометрическая сумма внешних сил, приложенных к телу, равна нулю. ∑F = 0
б) Пусть на доску действуют две равные силы, как показано на рисунке.

Будет ли она находиться в равновесии? (Нет, она будет поворачиваться)
В покое находится только центральная точка, а остальные движутся. Значит, чтобы тело находилось в равновесии, необходимо, чтобы сумма всех сил, действующих на каждый элемент равнялась 0.
Второе условие равновесия: Сумма моментов сил, действующих по часовой стрелке, должна равняться сумме моментов сил, действующих против часовой стрелки.
∑ M по часовой = ∑ M против часовой
Момент силы: M = F L
L – плечо силы – кратчайшее расстояние от точки опоры до линии действия силы.
3. Центр тяжести тела и его нахождение. (слайд 4)
Центр тяжести тела – это точка, через которую проходит равнодействующая всех параллельных сил тяжести, действующих на отдельные элементы тела (при любом положении тела в пространстве).
Найти центр тяжести следующих фигур:

4. Виды равновесия.
а) (слайды 5–8)


Вывод: Равновесие устойчиво, если при малом отклонении от положения равновесия есть сила, стремящаяся вернуть его в это положение.
Устойчиво то положение, в котором его потенциальная энергия минимальна. (слайд 9)
б) Устойчивость тел, находящихся на точке опоры или на линии опоры. (слайды 10–17)

Вывод: Для устойчивости тела, находящегося на одной точке или линии опоры необходимо, чтобы центр тяжести находился ниже точки (линии) опоры.
в) Устойчивость тел, находящихся на плоской поверхности.
(слайд 18)
1) Поверхность опоры – это не всегда поверхность, которая соприкасается с телом (а та, которая ограниченна линиями, соединяющими ножки стола, треноги)

2) Разбор слайда из «Электронных уроков и тестов», диск «Работа и мощность», урок «Виды равновесия».
Рисунок 1.
- Чем различаются табуретки? (Площадью опоры)
- Какая из них более устойчивая? (С большей площадью)
- Чем различаются табуретки? (Расположением центра тяжести)
- Какая из них наиболее устойчива? (Укоторой центр тяжести ниже)
- Почему? (Т.к. её можно отклонить на больший угол без опрокидывания)
3) Опыт с призмой отклоняющейся
- Поставим на доску призму с отвесом и начнём её постепенно поднимать за один край. Что мы видим?
- Пока линия отвеса пересекает поверхность, ограниченную опорой, равновесие сохраняется. Но как только вертикаль, проходящая через центр тяжести, начнёт выходить за границы поверхности опоры, этажерка опрокидывается.
Разбор слайдов 19–22 .

Выводы:
- Устойчиво то тело, у которого площадь опоры больше.
- Из двух тел одинаковой площади устойчиво то тело, у которого центр тяжести расположен ниже, т.к. его можно отклонить без опрокидывания на большой угол.
Разбор слайдов 23–25.

Какие корабли наиболее устойчивы? Почему? (У которых груз расположен в трюмах, а не на палубе)

Какие автомобили наиболее устойчивы? Почему? (Чтобы увеличить устойчивость машин на поворотах, полотно дороги наклоняют в сторону поворота.)
Выводы: Равновесие может быть устойчивым, неустойчивым, безразличным. Устойчивость тел тем больше, чем больше площадь опоры и ниже центр тяжести.
III. Применение знаний об устойчивости тел.
- Каким специальностям наиболее необходимы знания о равновесии тел?
- Проектировщикам и конструкторам различных сооружений (высотных зданий, мостов, телевизионных башен и т.д.)
- Цирковым артистам.
- Водителям и другим специалистам.
(слайды 28–30)
- Почему «Ванька-встанька» возвращается в положение равновесия при любом наклоне игрушки?
- Почему Пизанская башня стоит под наклоном и не падает?
- Каким образом сохраняют равновесие велосипедисты и мотоциклисты?
Выводы из урока:
- Существует три вида равновесия: устойчивое, неустойчивое, безразличное.
- Устойчиво положение тела, в котором его потенциальная энергия минимальна.
- Устойчивость тел на плоской поверхности тем больше, чем больше площадь опоры и ниже центр тяжести.
Домашнее задание : § 54– 56 (Г.Я. Мякишев, Б.Б. Буховцев, Н.Н. Сотский)
Использованные источники и литература:
- Г.Я. Мякишев, Б.Б. Буховцев, Н.Н.Сотский. Физика. 10 класс.
- Диафильм «Устойчивость» 1976 г. (отсканирован мною на плёночном сканере).
- Диск «Движение и взаимодействие тел» из «Электронных уроков и тестов».
- Диск «Работа и мощность» из «Электронных уроков и тестов».