Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
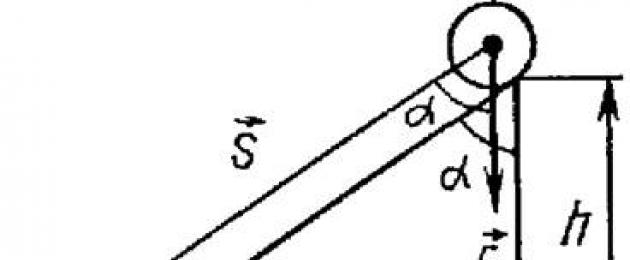
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.

Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .

Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:

Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
2.4.1. Кинетическая энергия механической системы. Кинетической энергией материальной точки массы , движущейся со скоростью , называют величину
Кинетической энергией механической системы называют сумму кинетических энергий включенных в эту систему материальных точек:
В тех случаях, когда масса системы распределена непрерывно, суммирование в выражении (7) заменяют интегрированием по области распределения.
Связь между значениями кинетической энергии механической системы в двух системах отсчета, одна из которых неподвижна, а другая движется поступательно со скоростью , где точка С – центр масс механической системы, дает теорема Кенига:
![]() . (8)
. (8)
Здесь ![]() - кинетическая энергия механической системы в подвижной системе координат.
- кинетическая энергия механической системы в подвижной системе координат.
Использование выражений (6, 7, 8) позволяет записать формулы для вычисления кинетической энергии твердого тела:
При поступательном движении тела массой со скоростью
При вращении с угловой скоростью вокруг неподвижной оси тела с моментом инерции
при плоскопараллельном движении твердого тела с угловой скоростью при значении центрального момента инерции относительно оси, перпендикулярной плоскости движения, и значении момента инерции относительно мгновенной оси вращения
![]() . (11)
. (11)
2.4.2. Энергетические характеристики . К энергетическим характеристикам силы относят ее мощность, работу и потенциальную энергию.
Мощностью силы , точка приложения которой движется со скоростью , называют величину
Работа силы на элементарном интервале времени и соответствующем этому промежутку времени элементарному смещению точки приложения определяется по правилу
Работой силы на конечном интервале времени и соответствующем изменении радиуса – вектора точки приложения этой силы от до называют величину
 . (14)
. (14)
Работа момента пары сил вычисляется аналогично.
Потенциальная энергия определена только в тех случаях, когда выражение (13) представляет собой полный дифференциал :
При выполнении условия (15) говорят, что сила потенциальна. Соотношения, связывающие проекции силы на оси выбранной координатной системы с функцией :
Если точка приложения силы переместилась из положения в положение , то путем интегрирования (15) можно получить
 . (17)
. (17)
Замечание: потенциальная энергия определена с точностью до постоянного слагаемого; отмеченная особенность позволяет полагать потенциальную энергию равной нулю в выбираемой нами точке (например, в начале координат).
В том случае, когда для совокупности сил, действующих на механическую систему, можно записать выражение потенциальной энергии , механическую систему называют консервативной . Такие механические системы обладают важными особенностями – работа действующих сил не зависит от вида траектории и закона движения по ней; работа при движении по замкнутому контуру равна нулю.
Условия, при выполнении которых существует функция :
2.4.3. Теорема об изменении кинетической энергии. Запись теоремы об изменении кинетической энергии механической системы в дифференциальной форме:
Производная по времени от кинетической энергии механической системы равна мощности внешних и внутренних сил.
Интегральная форма записи теоремы об изменении кинетической энергии
![]() , (20)
, (20)
где ; ; ; .
В частном случае, когда для совокупности внешних и внутренних сил системы можно записать выражение потенциальной энергии, выполняется закон сохранения полной механической энергии
а сама система оказывается консервативной.
ПРИМЕР 3. Для механической системы, изображенной на рис.2, получить дифференциальное уравнение движения груза.
РЕШЕНИЕ. Воспользуемся теоремой об изменении кинетической энергии в дифференциальной форме (19). Мысленно освободимся от связей, приложив к телам механической системы соответствующие реакции (см.рис.2). Замечание: силы, приложенные в неподвижном центе масс соосного блока не изображены, так как их мощность равна нулю.

Составим выражение для кинетической энергии механической системы.
Интегральная (конечная) форма . Теорема об изменении кинетической энергии материальной точки: изменение кинетической энергии мате-риальной точки на некотором ее перемещении равно алгебраической сумме работ всех действующих на эту точку сил на том же перемещении .
Теорема об изменении кинетической энергии механической системы формулируется: изменение кинетической энергии меха-нической системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних cuл, приложенных к системе, на этом перемещении:
В случае неизменяемой системы сумма работ внутренних сил на любом перемещении равна нулю (), тогда
Закон сохранения механической энергии. При движении механической системы под действием сил, имеющих потенциал, изменения кинетической энергии системы определяются зависимостями:
Откуда ,
Сумму кинетической и потенциальной энергий системы называют полной механической энергией системы.
Таким образом , при движении механической системы в стационар-ном потенциальном поле полная механическая энергия системы при движении остается неизменной .
Задача. Механическая система под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела 3, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость и ускорение тела 1 в тот момент, когда пройденный им путь станет равным s (рис. 3.70).
В задаче принять:
Решение. На механическую систему действуют активные силы , , . Применяя принцип освобождения от связей системы, покажем реакции шарнирно-неподвижной опоры 2 и шероховатой наклонной поверхности. Направления скоростей тел системы изобразим с учетом того, что тело 1 спускается.
Задачу решим, применяя теорему об изменении кинетической энергии механической системы :
где Т и - кинетическая энергия системы в начальном и конечном положениях; - алгебраическая сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное; - сумма работ внутренних сил системы на том же перемещении.
Для рассматриваемой системы, состоящей из абсолютно твердых тел, соединенных нерастяжимыми нитями:
Так как в начальном положении система покоилась, то . Следовательно:
Кинетическая энергия системы представляет собой сумму кинетических энергий тел 1, 2, 3:
Кинетическая энергия груза 1, движущегося поступательно, равна:
Кинетическая энергия блока 2, совершающего вращение вокруг оси Оz , перпендикулярной плоскости чертежа:
Кинетическая энергия тела 3 в его поступательном движении:
Таким образом,
Выражение кинетической энергии содержит неизвестные скорости всех тел системы. Начать определение необходимо с . Избавимся от лишних неизвестных, составив уравнения связей.
Уравнения связей это не что иное, как кинематические соотношения между скоростями и перемещениями точек системы. При составлении уравнений связей выразим все неизвестные скорости и перемещения тел системы через скорость и перемещение груза 1.
Скорость любой точки обода малого радиуса равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения r:
Отсюда выразим угловую скорость тела 2:
Вращательная скорость любой точки обода блока большого радиуса , с одной стороны, равна произведению угловой скорости блока и радиуса вращения, а с другой - скорости тела 3:
Подставив значение угловой скорости, получим:
Проинтегрировав при начальных условиях выражения (а) и (б), запишем соотношение перемещений точек системы:
Зная основные зависимости скоростей точек системы, вернемся к выражению кинетической энергии и подставим в него уравнения (а) и (б):
Момент инерции тела 2 равен:
Подставляя значения масс тел и момента инерции тела 2, запишем:
Определение суммы работ всех внешних сил системы на заданном перемещении.
Теперь согласно теореме об изменении кинетической энергии механической системы приравняем значения Т и
Скорость тела 1 получим из выражения (г)
Ускорение тела 1 можно определить, продифференцировав по времени равенство (г).
Кинетическая энергия механической системы - это сумма кинетических энергий всех ее материальных точек:
Вычислим дифференциал от выражения кинетической энергии и выполним некоторые простые преобразования:

Опуская промежуточные значения и применяя ранее введенный для обозначения элементарной работы символ , запишем:

Итак, дифференциал кинетической энергии механической системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на точки системы. В этом и состоит содержание теоремы об изменении кинетической энергии.
Заметим, что сумма работ внутренних сил системы в общем случае не равна нулю. Она обращается в нуль только в некоторых частных случаях: когда системой служит абсолютно твердое тело; система абсолютно твердых тел, взаимодействующих при помощи не-деформируемых элементов (идеальных шарниров, абсолютно твердых стержней, нерастяжимых нитей и т.п.). По этой причине теорема об изменении кинетической энергии является единственной из общих теорем динамики, которая учитывает эффект действия внутренних сил.
Можно интересоваться изменением кинетической энергии не за бесконечно малый промежуток времени, как это делается выше, а за некоторый конечный промежуток времени . Тогда при помощи интегрирования можно получить:

Здесь - значения кинетической энергии соответственно в моменты времени - суммы полных работ внешних и внутренних сил за рассматриваемый промежуток времени.
Полученное равенство выражает теорему об изменении кинетической энергии в конечной (интегральной) форме, которая может быть сформулирована так: изменение кинетической энергии при переходе механической системы из одного положения в другое равно сумме полных работ всех внешних и внутренних сил.

Лекция 5. Теорема об изменении кинетической энергии
5. 1. Работа силы
Пусть сила ![]() – равнодействующая всех сил системы, приложена к точке Р, а (dx
,
dy
,
dz
)
– элементарное перемещение точки Р вдоль ее траектории Р 1 Р 2 (рис. 5.1). Элементарной работой d
А
силы называют скалярное произведение
– равнодействующая всех сил системы, приложена к точке Р, а (dx
,
dy
,
dz
)
– элементарное перемещение точки Р вдоль ее траектории Р 1 Р 2 (рис. 5.1). Элементарной работой d
А
силы называют скалярное произведение
Элементарная работа является скалярной величиной. Если - угол между силой и направлением перемещения , то выражение (5.1) можно представить в виде
где - проекция силы на направление элементарного перемещения (или направление скорости точки).
Знак элементарной работы зависит от знака функции . Если - острый угол, то , если - тупой угол, то , если , то .
Пусть точка Р совершает конечное перемещение из положения в положение , описывая дугу . Разобьем дугу на n произвольных малых участков, обозначив длину участка с номером k через . Тогда элементарная работа силы на k -м участке будет равна , а на всем пути от до - сумме работ на отдельных участках

Точное значение работы получим, переходя к пределу, при условии, что число участков n неограниченно возрастает, а длина каждого участка убывает:
 .
.
Такой предел называется криволинейным интегралом первого рода по дуге и записывается следующим образом
![]() . (5.3)
. (5.3)
Результат интегрирования является полной работой А силы F на рассматриваемом конечном перемещении вдоль пути .
5. 1. 1. Работа силы тяжести
Пусть m – масса точки, g – ускорение свободного падения. Тогда

Вычисляя работу по формулам (5.1) и (5.3), имеем

где - высота опускания точки.
При подъеме точки , следовательно, .
5. 1. 2. Работа линейной силы упругости

Пусть материальная точка Р движется вдоль оси Ох (рис. 5.3) под действием пружины, к которой она прикреплена. Если при , , то пружина деформирована и при малых отклонениях точки можно считать, что со стороны пружины к ней приложена сила упругости . Тогда работа силы упругости на перемещении x 0 x 1 будет равна
 . (5.5)
. (5.5)
Работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинения (или сжатий) пружины.
5. 1. 3. Элементарная работа сил, приложенных к твердому телу
Рассмотрим движение тела в плоскости. Пусть О – произвольно выбранная точка на твердом теле (рис.5.4). Назовем ее полюсом. Тогда движение тела в плоскости можно представить как сумму простейших: поступательного движения вместе с полюсом и вращение тела вокруг полюса. Тогда, скорость точки относительно неподвижной системы координат определится как геометрическая сумма двух скоростей
где - скорость полюса, - вектор угловой скорости твердого тела, – скорость Эйлера, т е. скорость точки при ее ращении вокруг полюса.

Будем представлять твердое тело как механическую систему, состоящую из N отдельных точек, взаимное расстояние между которыми не изменяется.
Вычислим смещение точки под действием силы :
Тогда .
Элементарная работа, согласно (5.1), запишется следующим образом
Воспользовавшись свойствами смешенного произведения векторов ![]() , перепишем последнее выражение в виде
, перепишем последнее выражение в виде
Пусть - равнодействующая всех сил, внешних и внутренних (рис5.4), приложенных в точке тела, т.е.
![]() .
.
Тогда (а) запишется так

Согласно (3.1 и 3.2), главный вектор и главный момент внутренних сил системы равны нулю, получаем
здесь: ![]() – главный вектор,
– главный вектор, ![]() – главный момент внешних сил относительно точки О
.
– главный момент внешних сил относительно точки О
.
Частные случаи
A. Поступательное движение твердого тела . Все точки тела имеют одинаковые перемещения (рис. 5.5, а) и по модулю, и по направлению, тогда, из (5.6), получим (здесь ):
![]() . (5.7)
. (5.7)
B. Вращение твердого тела вокруг неподвижной оси . Пусть ось z проходит через полюс О (рис. 5.5б). Тогда , ; из (5.6) получим
![]() . (5.8)
. (5.8)

Пример. Катушка массой m и радиусом R приводится в движение постоянной силой F , приложенной в точке А (рис. 5.6). Катушка катится вправо без скольжения по шероховатой поверхности.

Вычислить работу всех внешних сил, если центр катушки переместился на расстояние , - коэффициент трения качения, - сила трения, r – радиус сердечника катушки, к которой приложена сила.
Решение. Катушка совершает плоское движение. Так как качение происходит без скольжения, то мгновенный центр скоростей находится в точке касания катушки с плоскостью, т.е. в точке Р (рис.5.6). Направим ось S по горизонтали вправо. В соответствии с направлением движения примем положительное направление угла поворота против хода часовой стрелки.
Пусть центр катушки С переместится на . При этом катушка повернется на угол . Тогда , откуда
Приняв точку Р за мгновенную ось вращения, вычислим элементарную работу по формуле (5.8):
 (а)
(а)
Здесь: линии действия сил и mg пересекают ось вращения, поэтому ; далее , где N – сила нормальной реакции.
Для определения искомой работы остается взять определенный интеграл от (а) в пределах от 0 до S А . Получим
5. 2. Силовое поле. Силовая функция. Потенциальная энергия
Предположим, что точка движется в некотором пространстве и на нее со стороны пространства действует сила, которая зависит от положения точки в этом пространстве, но не зависит от скорости движения точки. В этом случае говорят, что в пространстве задано силовое поле , а также, что точка движется в силовом поле. Соответствующие понятия для системы материальных точек аналогичны.
Силы, зависящие от положения точек их приложения, в механике встречаются часто. Например, сила упругости, приложенная к материальной точке, которая движется по горизонтальной прямой под действием пружины. Важнейшим примером силового поля в природе является гравитационное поле: действие Солнца на планету данной массы определяется в каждой точке пространства законом всемирного тяготения.
Силовое поле называется потенциальным , если существует скалярная функция U , зависящая только от координат , , точки -точки материальной системы (возможно, и от времени), такая, что
Функция называется силовой функцией .
Рассмотрим свойства силовой функции.
Элементарная работа (5.1) связана с силовой функцией следующим образом
Таким образом, элементарная работа силы в потенциальном силовом поле равна полному дифференциалу от силовой функц ии.
Полная работа силы на участке от точки ![]() до точки
до точки ![]() (рис.5.1)
(рис.5.1)
т.е. . (5.10)
Из полученных выражений следует, что
1. работа силы в потенциальном силовом поле по любому замкнутому пути равна нулю;
2. работа силы в потенциальном силовом поле зависит только от положения конечной и начальной точек, но сам путь перемещения роли не играет.
Потенциальная энергия. Потенциальной энергией П в рассматриваемой точке силового поля Р называют работу, которую совершают силы поля, действующую на материальную точку при ее перемещении из точки Р в начальную точку 1 , т.е.
П
= или П
= ![]()
Свяжем силовую функцию U с потенциальной энергией. Имеем
Примеры вычисления потенциальной энергии
1. Однородное поле тяжести . Пусть m – масса точки; g – ускорение свободного падения. Тогда (рис. 5.2)
2. Силовое поле упругой пружины . Пусть материальная точка движется вдоль оси Ох (рис. 5.3) под действием пружины, к которой она прикреплена. Если при пружина не деформирована, то, полагая в формуле (5.5) , получим
![]() .
.
5. 3. Кинетическая энергия
5. 3. 1. Кинетическая энергия системы. Теорема Кенига
Кинетической энергией материальной точки называют половину произведения массы точки на квадрат ее скорости, т.е.
.
Кинетическая энергия, является скалярной положительной величиной. В системе СИ, единицей измерения кинетической энергии является джоуль: ![]() .
.
Кинетической энергией механической системы называется сумма кинетических энергий всех точек, входящих в систему:
 (5.11)
(5.11)
Скорости точек системы (5.1) определяются относительно неподвижной системы отсчета.

Совместим начало координат с центром масс системы. Предположим, что механическая система вместе с системой координат движется поступательно относительно неподвижной системы координат (рис.5.7). Точка – точка системы.
Тогда, на основании теоремы о сложении скоростей, абсолютная скорость точки Р k . системы запишется так векторная сумма переносной и относительной скоростей:
![]() , (а)
, (а)
где – скорость начала подвижной системы координат (переносная скорость, т.е. скорость центра масс системы); – скорость точки Р k относительно подвижной системы координат Оху z (относительная скорость).
Подставляя (а) в формулу (5.11), получаем
 (5.12)
(5.12)
Здесь - масса всей системы.
Радиус-вектор центра масс системы в подвижной системе координат определяется, согласно (2.1), –  , откуда
, откуда  , т.е.
, т.е. ![]() . Поскольку начало координат О
является центром масс системы, то , тогда , т.е. вторая сумма в выражении (5.12) равна нулю.
. Поскольку начало координат О
является центром масс системы, то , тогда , т.е. вторая сумма в выражении (5.12) равна нулю.
Таким образом, кинетическая энергия системы (5.12) имеет вид
 (5.13)
(5.13)
Это равенство определяет теорему Кенига.
Теорема . Кинетическая энергия системы равна сумме кинетической энергии, которую имела бы материальная точка, расположенная в центре масс системы и имеющая массу, равную массе системы, и кинетической энергии движения системы относительно центра масс.
5. 3. 2. Кинетическая энергия твердого тела
Твердое тело является частным случаем механической системы и рассматривается как непрерывно распределенная масса, тогда все суммы, входящие в выражение для кинетической энергии системы, переходят в интегралы. Так, для твердого тела формула (5.11) примет вид
![]() . (5.14)
. (5.14)

1. Кинетическая энергия твердого тела, двигающегося поступательно.
При этом виде движения скорости всех точек тела одинаковы (рис. 5.8). Вынося в формуле (5.14) за знак интеграла, получим
![]() . (5.15)
. (5.15)
Кинетическая энергия твердого тела, движущегося поступательно, равна половине произведения массы тела M на квадрат его скорости.
2. Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси

Модуль скорости V любой точки твердого тела, вращающегося вокруг неподвижной оси, равен , где - модуль угловой скорости твердого тела, - расстояние от точки до оси вращения z (рис. 5.9). Подставляя в формулу (5.14), получим
здесь ![]() – момент инерции твердого тела относительно оси z
.
– момент инерции твердого тела относительно оси z
.
Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси, равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости тела.
3. Кинетическая энергия твердого тела при плоско – параллельном движении
При плоско – параллельном движении скорость любой точки тела состоит из геометрической суммы скорости полюса и скорости точки при вращении вокруг полюса. Пусть тело движется плоско в плоскости Oxy , тогда
|| . За полюс выбираем центр масс тела, тогда в формуле (5.13), скорость есть скорость точки k
тела при ее вращении относительно полюса (центра масс) и равна ![]() , где расстояние k
-
ой точки до полюса. Тогда (5.13) перепишется
, где расстояние k
-
ой точки до полюса. Тогда (5.13) перепишется

Имея в виду, что ![]() – момент инерции тела относительно оси z
, проходящей через полюс С
, последнее выражение можно переписать как
– момент инерции тела относительно оси z
, проходящей через полюс С
, последнее выражение можно переписать как
![]() , (5.17)
, (5.17)
при плоско – параллельном движении тела кинетическая энергия складывается из кинетической энергии поступательного движения вместе с центром масс и кинетической энергии от вращения вокруг оси, проходящей через центр масс и перпендикулярной плоскости движения.
5. 4. Теорема об изменении кинетической энергии
5. 4. 1. Теорема об изменении кинетической энергии точки

Найдем связь между работой и изменением скорости. Пусть материальная точка массой m перемещается вдоль оси Ох под действием силы, например сжатой или разжатой пружины, закрепленной в начале координат, – точке О (рис. 5.10). Уравнение движения точки имеет вид
Умножим обе части этого уравнения на , и, учитывая, что  , получим
, получим
 . (5.19)
. (5.19)
В правой части этого равенства заменим V x на и умножим на dt правую и левую части. Тогда
 . (5.20)
. (5.20)
В этом виде равенство имеет очень наглядный смысл: при смещении точки на dx , сила совершает работу , в результате чего изменяется величина кинетической энергии точки , характеризующая движение точки и, в частности, модуль ее скорости. Если точка смещается из положения в , а ее скорость при этом изменяется от до , то, интегрируя (5.20), имеем
 . (5.21)
. (5.21)
Учитывая, что  , окончательно находим
, окончательно находим
 . (5.22)
. (5.22)
Изменение кинетической энергии материальной точки при ее каком-либо перемещении равно работе силы, действующей на точку на том же перемещении.
Проделывая все предыдущие процедуры, получим
 ,
,
здесь – дуга, вдоль которой перемещается точка (рис. 5.11).
5. 4. 2. Теорема об изменении кинетической энергии системы
Пусть точки системы массой переместились так, что их радиус-векторы в инерциальной системе отсчета получили приращение . Найдем, как при этом изменилась кинетическая энергия Т системы.
Согласно (5.11), кинетическая энергия системы
 .
.
Вычислим дифференциал кинетической энергии системы и преобразуем полученное выражение

здесь 
Принимая во внимание, что ![]() , где - ускорение точки а и - равнодействующие внешних и внутренних сил, приложенных к точке, перепишем последнее равенство в виде
, где - ускорение точки а и - равнодействующие внешних и внутренних сил, приложенных к точке, перепишем последнее равенство в виде
Таким образом,
![]() . (5.23)
. (5.23)
Последнее равенство выражает теорему об изменении кинетической энергии механической системы в дифференциальной форме: дифференциал кинетической энергии системы равен элементарной работе всех сил системы.
Частный случай . Для абсолютно твердого тела сумма работ всех внутренних сил системы равна нулю:
![]() .
.
Следовательно, теорему об изменении кинетической энергии (5.23) для твердого тела можно записать в виде
Изменение кинетической энергии твердого тела при каком-либо элементарном перемещении равно элементарной работе внешних сил, действующих на тело.
Если обе части (5.24) проинтегрировать между двумя положениями – начальным и конечным, в которых соответственно кинетическая энергия и , получаем
![]() . (5.25)
. (5.25)
Пример 1 . Диск массой m =5 кг и радиусом приводится в движение постоянной силой , приложенной в точке А (рис. 5.6). Диск катится по шероховатой поверхности вправо без скольжения. Определить скорость центра масс С катушки в момент, когда он переместится на расстояние , коэффициент трения скольжения , , радиус инерции диска
Решение. Диск совершает плоское движение. Запишем теорему об изменении кинетической энергии для твердого тела
Вычислим кинетическую энергию диска. В начальный момент времени диск находился в покое, т.е. . Кинетическая энергия в конечном положении диска