Energi kallas skalär fysisk kvantitet, som är ett enda mått på olika former av materias rörelse och ett mått på övergången av materiens rörelse från en form till en annan.
För att karakterisera olika former av materias rörelse introduceras motsvarande energityper, till exempel: mekanisk, intern, elektrostatisk energi, intranukleär interaktion, etc.
Energi lyder bevarandelagen, som är en av de viktigaste naturlagarna.
Mekanisk energi E kännetecknar kroppars rörelse och samverkan och är en funktion av kropparnas hastigheter och relativa positioner. Det är lika med summan av kinetiska och potentiella energier.
Rörelseenergi
Låt oss överväga fallet när en kropp av massa m det finns en konstant kraft \(~\vec F\) (den kan vara resultanten av flera krafter) och vektorerna för kraft \(~\vec F\) och förskjutningen \(~\vec s\) är riktade längs en rak linje i en riktning. I detta fall kan det arbete som kraften utför definieras som A = F∙s. Kraftmodulen enligt Newtons andra lag är lika med F = m∙a, och förskjutningsmodulen s i likformigt accelererad rätlinjig rörelse är associerad med modulerna i initialen υ 1 och final υ 2 hastigheter och accelerationer A uttryck \(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
Härifrån går vi till jobbet
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
En fysisk storhet som är lika med halva produkten av en kropps massa och kvadraten på dess hastighet kallas kroppens kinetiska energi.
Kinetisk energi representeras av bokstaven E k.
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Då kan likhet (1) skrivas så här:
\(~A = E_(k2) - E_(k1)\) . (3)
Kinetisk energisats
arbetet av de resulterande krafterna som appliceras på kroppen är lika med förändringen i kroppens kinetiska energi.
Eftersom förändringen i kinetisk energi är lika med kraftarbetet (3), uttrycks en kropps kinetiska energi i samma enheter som arbete, dvs i joule.
Om den initiala rörelsehastigheten för en massakropp mär noll och kroppen ökar sin hastighet till värdet υ , då är det arbete som kraften utför lika med det slutliga värdet av kroppens kinetiska energi:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Fysisk betydelse av kinetisk energi
Den kinetiska energin hos en kropp som rör sig med en hastighet v visar hur mycket arbete som måste utföras av en kraft som verkar på en kropp i vila för att ge den denna hastighet.
Potentiell energi
Potentiell energiär energin för interaktion mellan kroppar.
Den potentiella energin för en kropp som höjs över jorden är energin för interaktion mellan kroppen och jorden av gravitationskrafter. Den potentiella energin hos en elastiskt deformerad kropp är interaktionsenergin enskilda delar kroppar mellan sig genom elastiska krafter.
Potential kallas styrka, vars funktion beror endast på den ursprungliga och slutliga positionen för rörelsen materiell punkt eller kropp och beror inte på banans form.
I en sluten bana är det arbete som utförs av den potentiella kraften alltid noll. Potentiella krafter inkluderar gravitationskrafter, elastiska krafter, elektrostatiska krafter och några andra.
Befogenheter, vars arbete beror på banans form, kallas icke-potential. När en materiell punkt eller kropp rör sig längs en stängd bana är det arbete som utförs av den icke-potentiella kraften inte lika med noll.
Potentiell energi för interaktion av en kropp med jorden
Låt oss hitta det arbete som utförs av gravitationen F t när man flyttar en massa m vertikalt ner från en höjd h 1 över jordens yta till en höjd h 2 (Fig. 1). Om skillnaden h 1 – h 2 är försumbar jämfört med avståndet till jordens centrum, sedan tyngdkraften F t under kroppsrörelse kan betraktas som konstant och lika mg.
Eftersom förskjutningen sammanfaller i riktning med gravitationsvektorn är gravitationens arbete lika med
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
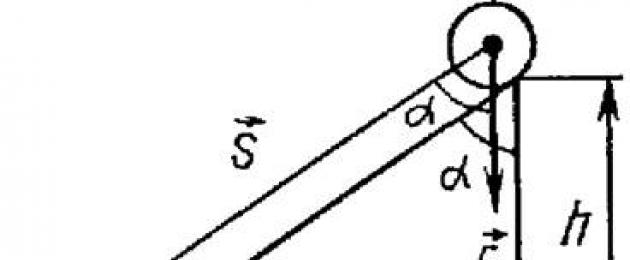
Låt oss nu betrakta en kropps rörelse längs ett lutande plan. När en kropp flyttas nerför ett lutande plan (fig. 2), tyngdkraften F t = m∙g fungerar
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
Var h– höjden på det lutande planet, s– förskjutningsmodul lika med längden på det lutande planet.

Förflyttning av en kropp från en punkt I exakt MED längs vilken bana som helst (fig. 3) kan mentalt föreställas bestå av rörelser längs sektioner av lutande plan med olika höjder h’, h'' etc. Arbete A gravitationen hela vägen från I V MED lika med summan av arbete på enskilda delar av sträckan:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\), (7)
Var h 1 och h 2 - höjder från jordens yta där punkterna är belägna I Och MED.

Likhet (7) visar att gravitationsarbetet inte är beroende av kroppens bana och alltid är lika med produkten av gravitationsmodulen och höjdskillnaden i utgångs- och slutpositionen.
När man rör sig nedåt är gravitationsarbetet positivt, när man rör sig uppåt är det negativt. Arbetet som utförs av gravitationen på en stängd bana är noll.
Jämställdhet (7) kan representeras enligt följande:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
En fysisk kvantitet lika med produkten av kroppsmassa och accelerationsmodul fritt fall och höjden till vilken kroppen höjs över jordens yta kallas potentiell energi växelverkan mellan kroppen och jorden.
Arbete som utförs av gravitationen när man flyttar en massa m från en punkt som ligger på en höjd h 2, till en punkt belägen på en höjd h 1 från jordens yta, längs vilken bana som helst, är lika med förändringen potentiell energi växelverkan mellan kroppen och jorden, taget med motsatt tecken.
\(~A = - (E_(p2) - E_(p1))\) . (9)
Potentiell energi anges med bokstaven E sid.
Värdet på den potentiella energin hos en kropp som höjs över jorden beror på valet av nollnivån, dvs. höjden vid vilken den potentiella energin antas vara noll. Man brukar anta att den potentiella energin för en kropp på jordens yta är noll.
Med detta val av nollnivån, den potentiella energin E p av en kropp belägen på en höjd h ovanför jordens yta, lika med produkten av kroppens massa m genom den absoluta accelerationen av fritt fall g och avstånd h det från jordens yta:
\(~E_p = m \cdot g \cdot h\) . (10)
Den fysiska innebörden av den potentiella energin av interaktion av en kropp med jorden
den potentiella energin hos en kropp som gravitationen verkar på är lika med det arbete som gravitationen utför när kroppen flyttas till nollnivån.
Till skillnad från kinetisk energi framåtrörelse, som bara kan ha positiva värden, kan en kropps potentiella energi vara både positiv och negativ. Kroppsmassa m, som ligger på en höjd h, Var h < h 0 (h 0 – noll höjd), har negativ potentiell energi:
\(~E_p = -m \cdot g \cdot h\) .
Potentiell energi av gravitationsinteraktion
Potentiell energi för gravitationsinteraktion av ett system av två materialpunkter med massor m Och M, ligger på avstånd r den ena från den andra är lika
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (elva)
Var Gär gravitationskonstanten och nollpunkten för den potentiella energireferensen ( E p = 0) accepteras kl r = ∞.
Potentiell energi av gravitationsinteraktion av en kropp med massa m med jorden, var h– kroppens höjd över jordens yta, M e – jordens massa, R e är jordens radie, och nollpunkten för den potentiella energiavläsningen väljs vid h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
Under samma villkor att välja noll referens, den potentiella energin av gravitationsinteraktion av en kropp med massa m med jorden för låga höjder h (h « R e) lika
\(~E_p = m \cdot g \cdot h\) ,
där \(~g = G \cdot \frac(M_e)(R^2_e)\) är modulen för gravitationsacceleration nära jordens yta.
Potentiell energi hos en elastiskt deformerad kropp
Låt oss beräkna det arbete som den elastiska kraften utför när fjäderns deformation (förlängning) ändras från ett visst initialvärde x 1 till slutvärde x 2 (fig. 4, b, c).

Den elastiska kraften ändras när fjädern deformeras. För att hitta det arbete som den elastiska kraften utför kan du ta medelvärdet av kraftmodulen (eftersom den elastiska kraften beror linjärt på x) och multiplicera med förskjutningsmodulen:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
där \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . Härifrån
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) eller \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (14)
En fysisk storhet som är lika med hälften av produkten av en kropps styvhet med kvadraten på dess deformation kallas potentiell energi elastiskt deformerad kropp:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
Av formlerna (14) och (15) följer att den elastiska kraftens arbete är lika med förändringen i den potentiella energin hos en elastiskt deformerad kropp, taget med motsatt tecken:
\(~A = -(E_(p2) - E_(p1))\) . (16)
Om x 2 = 0 och x 1 = X, då, som framgår av formlerna (14) och (15),
\(~E_p = A\) .
Fysisk betydelse av den potentiella energin i en deformerad kropp
den potentiella energin för en elastiskt deformerad kropp är lika med det arbete som utförs av den elastiska kraften när kroppen övergår till ett tillstånd där deformationen är noll.
Potentiell energi kännetecknar interagerande kroppar, och kinetisk energi kännetecknar rörliga kroppar. Både potentiell och kinetisk energi förändras endast som ett resultat av en sådan interaktion mellan kroppar där krafterna som verkar på kropparna fungerar annat än noll. Låt oss överväga frågan om energiförändringar under växelverkan mellan kroppar som bildar ett slutet system.
Stängt system- detta är ett system som inte påverkas av externa krafter eller dessa krafters verkan kompenseras. Om flera kroppar växelverkar med varandra endast av gravitationskrafter och elastiska krafter och inga yttre krafter verkar på dem, så är arbetet med de elastiska eller gravitationskrafterna lika med förändringen i kropparnas potentiella energi, taget med motsatt tecken:
\(~A = -(E_(p2) - E_(p1))\) . (17)
Enligt kinetisk energisatsen är arbetet som utförs av samma krafter lika med förändringen i kinetisk energi:
\(~A = E_(k2) - E_(k1)\) . (18)
Från en jämförelse av likheter (17) och (18) är det tydligt att förändringen i den kinetiska energin hos kroppar i ett slutet system är lika i absolut värde som förändringen i den potentiella energin i kroppssystemet och motsatt i tecken:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) eller \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
Lagen om bevarande av energi i mekaniska processer:
summan av den kinetiska och potentiella energin hos de kroppar som utgör ett slutet system och interagerar med varandra genom gravitationskrafter och elastiska krafter förblir konstant.
Summan av kroppars kinetiska och potentiella energi kallas total mekanisk energi.
Låt oss ge enklaste upplevelsen. Låt oss kasta upp en stålkula. Genom att ge starthastigheten υ tum kommer vi att ge den kinetisk energi, vilket är anledningen till att den börjar stiga uppåt. Tyngdkraftens verkan leder till en minskning av bollens hastighet, och därmed dess kinetiska energi. Men bollen stiger högre och högre och får mer och mer potentiell energi ( E p = m∙g∙h). Kinetisk energi försvinner alltså inte spårlöst utan omvandlas till potentiell energi.
I ögonblicket för att nå toppen av banan ( υ = 0) bollen är helt berövad på kinetisk energi ( E k = 0), men samtidigt blir dess potentiella energi maximal. Sedan ändrar bollen riktning och rör sig nedåt med ökande hastighet. Nu omvandlas den potentiella energin tillbaka till kinetisk energi.
Lagen om energibevarande avslöjar fysisk mening begrepp arbete:
gravitationskrafter och elastiska krafters arbete är å ena sidan lika med en ökning av kinetisk energi, och å andra sidan med en minskning av kropparnas potentiella energi. Därför är arbete lika med energi som omvandlas från en typ till en annan.
Lag om mekanisk energiförändring
Om ett system av interagerande kroppar inte är stängt, så bevaras inte dess mekaniska energi. Förändringen i mekanisk energi i ett sådant system är lika med externa krafters arbete:
\(~A_(vn) = \Delta E = E - E_0\) . (20)
Var E Och E 0 – totala mekaniska energier för systemet i slut- respektive initialtillstånd.
Ett exempel på ett sådant system är ett system där, tillsammans med potentiella krafter, verkar icke-potentiella krafter. Icke-potentiella krafter inkluderar friktionskrafter. I de flesta fall, när vinkeln mellan friktionskraften F r kroppen är π radianer är det arbete som utförs av friktionskraften negativt och lika med
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
Var s 12 – kroppsväg mellan punkterna 1 och 2.
Friktionskrafter under ett systems rörelse minskar dess kinetiska energi. Som ett resultat av detta minskar alltid den mekaniska energin i ett slutet icke-konservativt system och förvandlas till energin för icke-mekaniska rörelseformer.
Till exempel, en bil som rör sig längs en horisontell del av vägen, efter att ha stängt av motorn, färdas en bit och stannar under påverkan av friktionskrafter. Den kinetiska energin för bilens framåtrörelse blev lika med noll, och den potentiella energin ökade inte. När bilen bromsade värmdes bromsbelägg, bildäck och asfalt upp. Följaktligen, som ett resultat av verkan av friktionskrafter, försvann inte bilens kinetiska energi, utan förvandlades till intern energi termisk rörelse molekyler.
Lagen om bevarande och omvandling av energi
I varje fysisk interaktion omvandlas energi från en form till en annan.
Ibland vinkeln mellan friktionskraften F tr och elementär förskjutning Δ rär lika med noll och friktionskraftens arbete är positivt:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Exempel 1. Låt den yttre kraften F verkar på blocket I, som kan glida på vagnen D(Fig. 5). Om vagnen rör sig till höger, då arbetet utförs av den glidande friktionskraften F tr2 som verkar på vagnen från sidan av blocket är positivt:

Exempel 2. När ett hjul rullar riktas dess rullande friktionskraft längs rörelsen, eftersom hjulets kontaktpunkt med den horisontella ytan rör sig i motsatt riktning mot hjulets rörelseriktning, och friktionskraftens arbete är positivt (Fig. 6):

Litteratur
- Kabardin O.F. Fysik: Referens. material: Lärobok. manual för studenter. – M.: Utbildning, 1991. – 367 sid.
- Kikoin I.K., Kikoin A.K. Fysik: Lärobok. för 9:e klass. snitt skola – M.: Prosveshchenie, 1992. – 191 sid.
- Lärobok i elementär fysik: Proc. ersättning. I 3 band / Ed. G.S. Landsberg: bd 1. Mekanik. Värme. Molekylär fysik. – M.: Fizmatlit, 2004. – 608 sid.
- Yavorsky B.M., Seleznev Yu.A. En referensguide till fysik för dig som går in på universitet och självutbildning. – M.: Nauka, 1983. – 383 sid.
2.4.1. Rörelseenergi mekaniskt system. Den kinetiska energin för en materiell massapunkt som rör sig med hastighet kallas kvantiteten
Den kinetiska energin för ett mekaniskt system är summan av de kinetiska energierna för de materialpunkter som ingår i detta system:
I de fall systemets massa distribueras kontinuerligt ersätts summeringen i uttryck (7) av integration över distributionsområdet.
Förhållandet mellan värdena för den kinetiska energin för ett mekaniskt system i två referenssystem, varav det ena är stationärt och det andra rör sig translationellt med hastighet, där punkten C är det mekaniska systemets masscentrum, ges av Koenigs teorem:
![]() . (8)
. (8)
Här ![]() - kinetisk energi hos ett mekaniskt system i ett rörligt koordinatsystem.
- kinetisk energi hos ett mekaniskt system i ett rörligt koordinatsystem.
Genom att använda uttryck (6, 7, 8) kan du skriva formler för beräkning av kinetisk energi fast:
När en kropp av massa rör sig framåt med hastighet
Vid rotation med vinkelhastighet runt en fast axel hos en kropp med ett tröghetsmoment
i planparallell rörelse av en stel kropp med vinkelhastighet vid ett värde av det centrala tröghetsmomentet i förhållande till axeln vinkelrät mot rörelseplanet och ett värde på tröghetsmomentet i förhållande till den momentana rotationsaxeln
![]() . (11)
. (11)
2.4.2. Energiegenskaper. En krafts energiegenskaper inkluderar dess kraft, arbete och potentiella energi.
Kraft kraft, vars appliceringspunkt rör sig med hastigheten, kallas storleken
Jobb styrka på ett elementärt intervall tid och den elementära förskjutningen av appliceringspunkten som motsvarar denna tidsperiod bestäms av regeln
Arbete styrka på ett begränsat intervall tid och motsvarande förändring i radien - vektorn för appliceringspunkten för denna kraft från till - kallas storleken
 . (14)
. (14)
Arbetet som utförs av momentet av ett kraftpar beräknas på liknande sätt.
Potentiell energi definieras endast i fall där uttryck (13) är en total differential:
När villkoret (15) är uppfyllt, sägs kraften vara potentiell. Relationer som förbinder kraftprojektionerna på det valda koordinatsystemets axel med funktionen:
Om kraftens appliceringspunkt har flyttats från position till position kan vi genom att integrera (15) erhålla
 . (17)
. (17)
Notera: potentiell energi bestäms upp till en konstant term; Den noterade funktionen låter oss anta att den potentiella energin är lika med noll vid en punkt vi väljer (till exempel vid koordinaternas ursprung).
I det fall då det för den uppsättning krafter som verkar på ett mekaniskt system är möjligt att skriva ner uttrycket för potentiell energi, det mekaniska systemet kallas konservativ. Sådana mekaniska system har viktiga egenskaper - drift aktiva krafter beror inte på typen av bana och rörelselagen längs den; arbeta under förflyttning sluten slinga lika med noll.
Villkor under vilka en funktion existerar:
2.4.3. Sats om förändringen i kinetisk energi. Att skriva satsen om förändringen i kinetisk energi för ett mekaniskt system i differentialform:
Tidsderivatan av den kinetiska energin i ett mekaniskt system är lika med kraften hos yttre och inre krafter.
Integral form för att skriva satsen om förändringen i kinetisk energi
![]() , (20)
, (20)
Var ; ; ; .
I det speciella fallet när uttrycket för potentiell energi kan skrivas för totaliteten av yttre och inre krafter i systemet, är lagen om bevarande av total mekanisk energi uppfylld
och själva systemet visar sig vara konservativt.
EXEMPEL 3. För det mekaniska systemet som visas i fig. 2, erhåll differentialekvation förflyttning av last.
LÖSNING. Låt oss använda satsen om förändringen i kinetisk energi i differentialform (19). Låt oss mentalt befria oss från kopplingar genom att applicera lämpliga reaktioner på det mekaniska systemets kroppar (se fig. 2). Notera: krafterna som appliceras vid koaxialblockets stationära masscentrum är inte avbildade, eftersom deras effekt är noll.

Låt oss skapa ett uttryck för den kinetiska energin i ett mekaniskt system.
Integral (slutlig) form. Sats om förändringen i kinetisk energi för en materialpunkt: förändringen i den kinetiska energin för en materialpunkt vid en del av dess förskjutning är lika med den algebraiska summan av arbetet av alla krafter som verkar på denna punkt vid samma förskjutning.
Satsen om förändringen i kinetisk energi för ett mekaniskt system är formulerat: förändringen i den kinetiska energin hos ett mekaniskt system när det rör sig från en position till en annan är lika med summan av arbetet av alla yttre och inre krafter som appliceras på systemet under denna rörelse:
I fallet med ett oföränderligt system är summan av det arbete som utförs av inre krafter på varje förskjutning lika med noll (), då
Lagen om bevarande av mekanisk energi. När ett mekaniskt system rör sig under påverkan av krafter som har potential, bestäms förändringar i systemets kinetiska energi av beroenden:
Var ,
Summan av de kinetiska och potentiella energierna i ett system kallas total mekanisk energi system.
Således, När ett mekaniskt system rör sig i ett stationärt potentialfält förblir systemets totala mekaniska energi under rörelse oförändrad.
Uppgift. Ett mekaniskt system, under påverkan av gravitationen, kommer i rörelse från ett vilotillstånd. Med hänsyn till kroppens 3 glidfriktion, bortse från andra motståndskrafter och gängmassorna som antas vara outtöjbara, bestäm hastigheten och accelerationen för kropp 1 i det ögonblick då den färdväg som den färdats blir lika s(Fig. 3.70).
I uppgiften accepterar du:
Lösning. Det mekaniska systemet påverkas av aktiva krafter, , . Genom att tillämpa principen om att befria systemet från begränsningar kommer vi att visa reaktionerna från det gångjärnsfasta stödet 2 och den grova lutande ytan. Vi kommer att avbilda hastighetsriktningarna för systemets kroppar med hänsyn till det faktum att kropp 1 sjunker.
Låt oss lösa problemet genom att tillämpa satsen om förändringen i kinetisk energi i ett mekaniskt system:
Var T och är den kinetiska energin för systemet i de initiala och slutliga positionerna; - den algebraiska summan av det arbete som utförs av yttre krafter som appliceras på systemet för att flytta systemet från utgångsläget till slutläget; - summan av det arbete som utförs av systemets inre krafter vid samma förskjutning.
För det aktuella systemet, bestående av absolut styva kroppar förbundna med outtöjbara gängor:
Eftersom systemet var i vila i utgångsläget, då . Därav:
Systemets kinetiska energi är summan av de kinetiska energierna för kropparna 1, 2, 3:
Den kinetiska energin för last 1 som rör sig framåt är lika med:
Kinetisk energi för block 2 som roterar runt en axel Uns, vinkelrätt mot ritningsplanet:
Kinetisk energi för kropp 3 i dess framåtgående rörelse:
Således,
Uttrycket för kinetisk energi innehåller de okända hastigheterna för alla kroppar i systemet. Definitionen måste börja med . Låt oss bli av med onödiga okända genom att skapa sambandsekvationer.
Begränsningsekvationer är inget annat än kinematiska samband mellan hastigheter och rörelser för punkter i systemet. När vi komponerar begränsningsekvationerna kommer vi att uttrycka alla okända hastigheter och rörelser för systemets kroppar genom hastigheten och rörelsen för last 1.
Hastigheten för vilken punkt som helst på kanten med liten radie är lika med hastigheten på kropp 1, såväl som produkten av vinkelhastigheten på kropp 2 och rotationsradien r:
Härifrån uttrycker vi vinkelhastigheten för kropp 2:
Rotationshastigheten för vilken punkt som helst på kanten av ett block med stor radie är å ena sidan lika med produkten av blockets vinkelhastighet och rotationsradien, och å andra sidan hastigheten på kroppen 3 :
Genom att ersätta värdet på vinkelhastigheten får vi:
Efter att ha integrerade uttryck (a) och (b) under de initiala förhållandena, skriver vi förhållandet mellan förskjutningarna av systemets punkter:
Genom att känna till de grundläggande beroenden av hastigheterna för systemets punkter, återgår vi till uttrycket av kinetisk energi och ersätter ekvationerna (a) och (b) i det:
Tröghetsmomentet för kropp 2 är lika med:
Genom att ersätta kroppsmassornas värden och tröghetsmomentet för kropp 2 skriver vi:
Bestämning av summan av arbetet för alla yttre krafter i systemet vid en given förskjutning.
Nu, enligt satsen om förändringen i kinetisk energi för ett mekaniskt system, likställer vi värdena T Och
Hastigheten för kropp 1 erhålls från uttrycket (g)
Accelerationen av kropp 1 kan bestämmas genom att differentiera likheten (g) med avseende på tid.
Den kinetiska energin i ett mekaniskt system är summan av de kinetiska energierna för alla dess materiella punkter:
Låt oss beräkna skillnaden från uttrycket av kinetisk energi och utföra några enkla transformationer:

Sänkning mellanvärden och med hjälp av symbolen som tidigare introducerats för att beteckna elementärt arbete, skriver vi:

Så skillnaden mellan den kinetiska energin för ett mekaniskt system lika med summan elementära verk av alla yttre och inre krafter som verkar på punkter i systemet. Detta är innehållet i satsen om förändringen i kinetisk energi.
Observera att summan av det arbete som utförs av systemets inre krafter inte är lika med noll i det allmänna fallet. Det försvinner endast i vissa speciella fall: när systemet är en absolut stel kropp; ett system av absolut styva kroppar som samverkar med hjälp av icke-deformerbara element (ideala gångjärn, absolut styva stavar, outtöjbara gängor, etc.). Av denna anledning är satsen om förändringen i kinetisk energi den enda av dynamikens allmänna satser som tar hänsyn till effekten av inre krafter.
Man kan vara intresserad av förändringen i kinetisk energi inte över en oändlig tidsperiod, som gjorts ovan, utan över en viss begränsad tidsperiod. Med hjälp av integration kan vi få:

Här - värdena för kinetisk energi, respektive vid tidpunkter - summan av det totala arbetet av yttre och inre krafter under den betraktade tidsperioden.
Den resulterande likheten uttrycker satsen om förändringen i kinetisk energi i en slutlig (integral) form, som kan formuleras på följande sätt: förändringen i kinetisk energi under övergången av ett mekaniskt system från en position till en annan är lika med summan av det totala arbetet av alla yttre och inre krafter.

Föreläsning 5. Sats om förändringen av kinetisk energi
5. 1. Kraftarbete
Må kraften ![]() – resultanten av alla krafter i systemet, applicerade på punkt P, och ( dx,
dy,
dz)
– elementär rörelse av punkt P längs dess bana P 1 P 2 (Fig. 5.1). Elementärt arbete dA krafter kallas skalär produkt
– resultanten av alla krafter i systemet, applicerade på punkt P, och ( dx,
dy,
dz)
– elementär rörelse av punkt P längs dess bana P 1 P 2 (Fig. 5.1). Elementärt arbete dA krafter kallas skalär produkt
Elementärt arbete är en skalär storhet. Om är vinkeln mellan kraften och förskjutningsriktningen kan uttrycket (5.1) representeras som
var är projektionen av kraft på riktningen av elementär förskjutning (eller riktningen för punkthastighet).
Det elementära arbetets tecken beror på funktionens tecken. Om är en spetsig vinkel, då , Om är en trubbig vinkel, då , om , då .
Låt poängen R gör en sista rörelse från position till position och beskriver en båge. Låt oss dela upp bågen i n godtyckliga små sektioner, som anger längden på sektionen med numret k genom . Sedan det elementära kraftarbetet på k- sektion kommer att vara lika med , och hela vägen från till - mängden arbete i enskilda sektioner

Vi får det exakta värdet av arbetet genom att gå till gränsen, förutsatt att antalet sektioner nökar på obestämd tid, och längden på varje sektion minskar:
 .
.
En sådan gräns kallas en krökt integral av det första slaget längs en båge och skrivs på följande sätt
![]() . (5.3)
. (5.3)
Resultatet av integrationen är det fullständiga arbetet A styrka F på den betraktade ändliga förskjutningen längs vägen.
5. 1. 1. Tyngdarbete
Låta m – punktmassa, g- tyngdacceleration. Sedan

Att beräkna arbetet med formlerna (5.1) och (5.3), har vi

var är höjden på punktens nedstigning.
När punkten stiger, därför .
5. 1. 2. Arbete med linjär elastisk kraft

Låt materialet peka R rör sig längs axeln Åh(Fig. 5.3) under verkan av fjädern som den är fäst vid. Jag fet , , då deformeras fjädern och för små avvikelser av spetsen kan vi anta att en elastisk kraft appliceras på den från sidan av fjädern. Sedan arbetet med den elastiska kraften vid förskjutning x 0 x 1 kommer att vara lika
 . (5.5)
. (5.5)
Den elastiska kraftens arbete är lika med hälften av produkten av styvhetskoefficienten och skillnaden mellan kvadraterna av den initiala och slutliga förlängningen (eller kompressionen) av fjädern.
5. 1. 3. Elementärt kraftverk som appliceras på en fast kropp
Låt oss betrakta en kropps rörelse i ett plan. Låta HANDLA OM– en godtyckligt vald punkt på en solid kropp (Fig. 5.4). Låt oss kalla det en stolpe. Då kan en kropps rörelse i ett plan representeras som summan av det enklaste: translationsrörelse tillsammans med polen och kroppens rotation runt polen. Då kommer punktens hastighet i förhållande till det fasta koordinatsystemet att bestämmas som den geometriska summan av två hastigheter
var är polens hastighet, är vektorn för den stela kroppens vinkelhastighet, är Eulerhastigheten, dvs punktens hastighet när den roterar runt polen.

Vi kommer att representera en solid kropp som ett mekaniskt system bestående av N individuella punkter, vars inbördes avstånd inte ändras.
Låt oss beräkna förskjutningen av en punkt under påverkan av kraft:
Sedan .
Det elementära arbetet, enligt (5.1), kommer att skrivas enligt följande
Använda egenskaperna hos en blandad produkt av vektorer ![]() , skriver vi om det sista uttrycket i formuläret
, skriver vi om det sista uttrycket i formuläret
Låta vara resultatet av alla krafter, externa och interna (fig. 5.4), applicerade på en punkt på kroppen, dvs.
![]() .
.
Då kommer (a) att skrivas så här

Enligt (3.1 och 3.2) huvudvektor och huvudmomentet för systemets inre krafter är lika med noll, får vi
Här: ![]() – huvudvektor,
– huvudvektor, ![]() – huvudmomentet för yttre krafter i förhållande till punkten HANDLA OM.
– huvudmomentet för yttre krafter i förhållande till punkten HANDLA OM.
Speciella fall
A. Translationell rörelse av en stel kropp. Alla punkter i kroppen har samma förskjutningar (fig. 5.5, a) både i storlek och i riktning, sedan, från (5.6), får vi (här):
![]() . (5.7)
. (5.7)
B. Rotation av en stel kropp runt en fast axel. Låt axeln z passerar genom stolpen HANDLA OM(Fig. 5.5b). Sedan, ; från (5.6) får vi
![]() . (5.8)
. (5.8)

Exempel. Spolmassa m och radie R drivs av konstant kraft F, tillämpas vid punkten A(Fig. 5.6). Rullen rullar åt höger utan att glida på den grova ytan.

Beräkna arbetet för alla yttre krafter om spolens centrum har flyttats med ett avstånd, - rullfriktionskoefficient, - friktionskraft, r - radie för spolkärnan som kraften appliceras på.
Lösning. Spolen rör sig i en plan rörelse. Eftersom rullning sker utan glidning, är det momentana hastighetscentrumet beläget vid spolens kontaktpunkt med planet, dvs. vid punkten R(Fig. 5.6). Låt oss rikta S-axeln horisontellt åt höger. I enlighet med rörelseriktningen kommer vi att ta den positiva riktningen av rotationsvinkeln moturs.
Låt mitten av spolen MED kommer att flytta till. I detta fall kommer spolen att rotera i en vinkel. Varifrån då
Efter att ha accepterat poängen R för den momentana rotationsaxeln beräknar vi det elementära arbetet med formeln (5.8):
 (A)
(A)
Här: kraftlinjer och mg skära rotationsaxeln, därför; vidare, var N– styrkan av normal reaktion.
För att bestämma det nödvändiga arbetet återstår att ta en bestämd integral från (a) i intervallet från 0 till SA. Vi får
5. 2. Kraftfält. Power funktion. Potentiell energi
Låt oss anta att en punkt rör sig i ett utrymme och påverkas av en kraft från rymden som beror på punktens position i detta utrymme, men inte beror på hastigheten på punktens rörelse. I det här fallet säger de att utrymmet är givet kraftfält, och även att punkten rör sig i ett kraftfält. Motsvarande koncept för ett system av materialpunkter är likartade.
Krafter beroende på placeringen av punkterna för deras tillämpning påträffas ofta inom mekanik. Till exempel en elastisk kraft som appliceras på en materialpunkt som rör sig längs en horisontell linje under inverkan av en fjäder. Det viktigaste exemplet på ett kraftfält i naturen är gravitationsfältet: solens verkan på en planet med en given massa bestäms vid varje punkt i rymden av lagen universell gravitation.
Kraftfältet kallas potential, om det finns en skalär funktion U, endast beroende på koordinaterna , , punkt-punkt för materialsystemet (eventuellt också på tid), så att
Funktionen kallas kraftfunktion.
Låt oss betrakta kraftfunktionens egenskaper.
Elementärt arbete (5.1) är relaterat till kraftfunktionen enligt följande
Således, det elementära kraftarbetet i ett potentiellt kraftfält är lika med full differential från kraftfunktion ii.
Fullt arbete krafter i området från punkten ![]() till poängen
till poängen ![]() (Fig.5.1)
(Fig.5.1)
de där. . (5,10)
Av de erhållna uttrycken följer att
1. arbetet som utförs av en kraft i ett potentiellt kraftfält längs en sluten bana är noll;
2. kraftarbetet i ett potentiellt kraftfält beror endast på positionen för finalen och initialen poäng, men själva rörelsens väg spelar ingen roll.
Potentiell energi. Potentiell energi P vid den betraktade punkten av kraftfältet Rär det arbete som utförs av fältkrafter som verkar på en materiell punkt när den rör sig från en punkt R V startpunkt 1, dvs.
P= eller P= ![]()
Låt oss koppla ihop kraftfunktionen U med potentiell energi. Vi har
Exempel på beräkning av potentiell energi
1. Enhetligt gravitationsfält. Låta m– punktmassa; g - tyngdacceleration. Sedan (bild 5.2)
2. Elastiskt fjäderkraftfält. Låt materialpunkten röra sig längs axeln Åh(Fig. 5.3) under verkan av fjädern som den är fäst vid. Om vid fjädern inte är deformerad, då, förutsatt i formel (5.5), får vi
![]() .
.
5. 3. Kinetisk energi
5. 3. 1. Systemets kinetiska energi. Koenigs teorem
En materialpunkts kinetiska energi är hälften av produkten av punktens massa och kvadraten på dess hastighet, dvs.
.
Kinetisk energi är en positiv skalär kvantitet. I SI-systemet är enheten för kinetisk energi joule: ![]() .
.
Den kinetiska energin för ett mekaniskt system är summan av de kinetiska energierna för alla punkter som ingår i systemet:
 (5.11)
(5.11)
Hastigheterna för systempunkterna (5.1) bestäms i förhållande till en fast referensram.

Låt oss rikta in ursprunget för koordinaterna med systemets masscentrum. Låt oss anta att det mekaniska systemet tillsammans med koordinatsystemet rör sig translationellt relativt det fasta koordinatsystemet (fig. 5.7). Punkt – punkt i systemet.
Sedan, baserat på satsen om addition av hastigheter, punktens absoluta hastighet Rk. systemet kommer att skrivas som vektorsumman av de bärbara och relativa hastigheterna:
![]() , (A)
, (A)
var är hastigheten för början av det rörliga koordinatsystemet ( bärbar hastighet, dvs. hastigheten för systemets masscentrum); – punkthastighet Rk i förhållande till det rörliga koordinatsystemet Ohooz (relativ hastighet).
Genom att ersätta (a) i formel (5.11) får vi
 (5.12)
(5.12)
Här är massan av hela systemet.
Radievektorn för systemets masscentrum i det rörliga koordinatsystemet bestäms enligt (2.1), –  , var
, var  , dvs.
, dvs. ![]() . Sedan ursprunget HANDLA OMär systemets masscentrum, då , då, dvs. den andra summan i uttryck (5.12) är lika med noll.
. Sedan ursprunget HANDLA OMär systemets masscentrum, då , då, dvs. den andra summan i uttryck (5.12) är lika med noll.
Således har den kinetiska energin i systemet (5.12) formen
 (5.13)
(5.13)
Denna jämlikhet avgör Koenigs teorem.
Sats. Den kinetiska energin i ett system är lika med summan av den kinetiska energi som en materialpunkt belägen i systemets masscentrum och med en massa lika med systemets massa skulle ha, och den kinetiska rörelseenergin för systemet systemet i förhållande till massans centrum.
5. 3. 2. Kinetisk energi hos en fast kropp
En stel kropp är ett specialfall av ett mekaniskt system och betraktas som en kontinuerligt fördelad massa, då går alla summor som ingår i uttrycket för systemets kinetiska energi in i integraler. Således, för en fast kropp, kommer formel (5.11) att ha formen
![]() . (5.14)
. (5.14)

1. Kinetisk energi hos en stel kropp som rör sig framåt.
Med denna typ av rörelse är hastigheterna för alla punkter i kroppen desamma (fig. 5.8). Genom att ta ut heltecknet i formeln (5.14) får vi
![]() . (5.15)
. (5.15)
Den kinetiska energin hos en stel kropp som rör sig translationellt är lika med hälften av produkten av kroppens massaMmed kvadraten på dess hastighet.
2. Kinetisk energi hos en stel kropp som roterar runt en fast axel

Hastighetsmodul V av någon punkt på en stel kropp som roterar runt en fast axel är lika med , där är modulen för den stela kroppens vinkelhastighet, är avståndet från punkten till rotationsaxeln z(Fig. 5.9). Genom att ersätta formeln (5.14) får vi
Här ![]() – tröghetsmoment för en fast kropp i förhållande till axeln z.
– tröghetsmoment för en fast kropp i förhållande till axeln z.
Den kinetiska energin hos en stel kropp som roterar runt en fast axel är lika med hälften av produkten av kroppens tröghetsmoment i förhållande till rotationsaxeln och kvadraten på kroppens vinkelhastighet.
3. Kinetisk energi hos en stel kropp under planparallell rörelse
I planparallell rörelse består hastigheten av vilken punkt som helst på kroppen av geometrisk summa stavens hastighet och punktens hastighet vid rotation runt staven. Låt kroppen röra sig platt i ett plan Oxy, Då
|| . Vi väljer kroppens masscentrum som pol, sedan i formel (5.13) är hastigheten punktens hastighet k kropp under sin rotation i förhållande till polen (massacentrum) och är lika med ![]() , var är avståndet k-
åh peka på stolpen. Sedan (5.13) kommer att skrivas om
, var är avståndet k-
åh peka på stolpen. Sedan (5.13) kommer att skrivas om

Med tanke på det ![]() – kroppens tröghetsmoment i förhållande till axeln z passerar genom stolpen MED, kan det sista uttrycket skrivas om som
– kroppens tröghetsmoment i förhållande till axeln z passerar genom stolpen MED, kan det sista uttrycket skrivas om som
![]() , (5.17)
, (5.17)
i planparallell rörelse av en kropp är kinetisk energi summan av den kinetiska energin för translationsrörelse tillsammans med masscentrum och den kinetiska energin från rotation runt en axel som går genom masscentrum och vinkelrätt mot rörelseplanet.
5. 4. Sats om förändringen i kinetisk energi
5. 4. 1. Sats om förändringen i kinetisk energi för en punkt

Låt oss hitta sambandet mellan arbete och förändring i hastighet. Låt ett material peka med massa m rör sig längs axeln Åh under påverkan av en kraft, till exempel en komprimerad eller dekomprimerad fjäder fixerad vid koordinaternas ursprung - en punkt HANDLA OM(Fig. 5.10). En punkts rörelseekvation har formen
Låt oss multiplicera båda sidor av denna ekvation med , och, med hänsyn till det  , vi får
, vi får
 . (5.19)
. (5.19)
På höger sida av denna jämlikhet byter vi ut V x med och multiplicera med dt höger och vänster sida. Sedan
 . (5.20)
. (5.20)
I denna form har jämlikhet en mycket tydlig innebörd: när punkten förskjuts dx, kraften fungerar, som ett resultat av vilket kvantiteten ändras kinetisk energi för en punkt, som karakteriserar en punkts rörelse och i synnerhet dess hastighetsmodul. Om en punkt flyttas från en position till , och dess hastighet ändras från till , då integreras (5.20), har vi
 . (5.21)
. (5.21)
Med tanke på att  , hittar vi äntligen
, hittar vi äntligen
 . (5.22)
. (5.22)
Förändringen i den kinetiska energin för en materialpunkt under varje rörelse är lika med det arbete som utförs av kraften som verkar på punkten vid samma rörelse.
Genom att utföra alla tidigare procedurer får vi
 ,
,
här är den båge längs vilken punkten rör sig (fig. 5.11).
5. 4. 2. Sats om förändringen i systemets kinetiska energi
Låt masssystemets punkter röra sig så att deras radievektorer i tröghetsreferenssystemet får ett inkrement. Låt oss ta reda på hur den kinetiska energin förändrades T system.
Enligt (5.11), systemets kinetiska energi
 .
.
Låt oss beräkna differentialen för systemets kinetiska energi och transformera det resulterande uttrycket

Här 
Med hänsyn till det ![]() , där är accelerationen av punkt a och är de resulterande yttre och inre krafterna som appliceras på punkten, skriver vi om den sista likheten i formen
, där är accelerationen av punkt a och är de resulterande yttre och inre krafterna som appliceras på punkten, skriver vi om den sista likheten i formen
Således,
![]() . (5.23)
. (5.23)
Den sista likheten uttrycker satsen om förändringen i den kinetiska energin hos ett mekaniskt system i differentialform: differentialen för systemets kinetiska energi är lika med grundläggande arbete alla krafter i systemet.
Specialfall. För en absolut stel kropp är summan av det arbete som utförs av alla inre krafter i systemet lika med noll:
![]() .
.
Följaktligen kan satsen om förändringen i kinetisk energi (5.23) för en stel kropp skrivas i formen
Förändringen i den kinetiska energin hos en fast kropp under varje elementär förskjutning är lika med det elementära arbetet av yttre krafter som verkar på kroppen.
Om båda sidorna av (5.24) är integrerade mellan två positioner – initial och slutlig, där den kinetiska energin respektive är, får vi
![]() . (5.25)
. (5.25)
Exempel 1. Diskmassa m=5 kg och radien sätts i rörelse av en konstant kraft som appliceras vid punkten A(Fig. 5.6). Skivan rullar på en grov yta åt höger utan att glida. Bestäm hastigheten för massacentrum MED spolen i det ögonblick när den rör sig en sträcka , glidfriktionskoefficient , , skivans rotationsradie
Lösning. Skivan rör sig i en plan rörelse. Låt oss skriva ner satsen om förändringen i kinetisk energi för en fast kropp
Låt oss beräkna skivans kinetiska energi. Vid det inledande ögonblicket låg disken i vila, d.v.s. . Kinetisk energi vid skivans slutliga position
- I kontakt med 0
- Google+ 0
- OK 0
- Facebook 0