DEFINICJA
zrównoważona równowaga- jest to równowaga, w której ciało wyrwane z równowagi i pozostawione samemu sobie powraca do swojej poprzedniej pozycji.
Dzieje się tak, gdy przy niewielkim przemieszczeniu ciała w dowolnym kierunku od położenia wyjściowego wypadkowa sił działających na ciało staje się niezerowa i jest skierowana w stronę położenia równowagi. Na przykład kula leżąca na dnie kulistej wnęki (ryc. 1a).
DEFINICJA
Niestabilna równowaga- jest to równowaga, w której ciało wyprowadzone z pozycji równowagi i pozostawione samemu sobie będzie jeszcze bardziej odchylać się od pozycji równowagi.
W tym przypadku przy niewielkim przemieszczeniu ciała z położenia równowagi wypadkowa przyłożonych do niego sił jest niezerowa i jest skierowana z położenia równowagi. Przykładem jest kula umieszczona na szczycie wypukłej kulistej powierzchni (ryc. 1b).
DEFINICJA
Równowaga obojętna- jest to równowaga, w której ciało wyrwane z równowagi i pozostawione sobie nie zmienia swojego położenia (stanu).
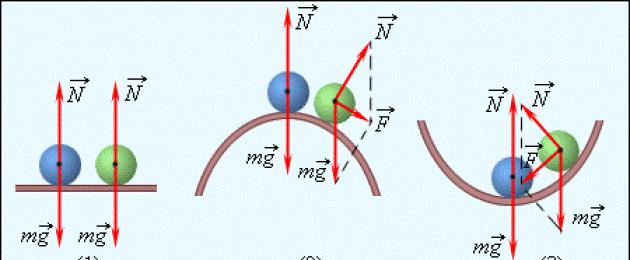
W tym przypadku, przy niewielkich przemieszczeniach ciała z jego pierwotnego położenia, wypadkowa sił przyłożonych do ciała pozostaje równa zeru. Na przykład piłka leżąca na płaskiej powierzchni (ryc. 1, c).
Rys.1. Różne rodzaje równowagi ciała na podporze: a) równowaga stabilna; b) niestabilna równowaga; c) równowaga obojętna.
Równowaga statyczna i dynamiczna ciał
Jeżeli w wyniku działania sił ciało nie otrzymuje przyspieszenia, może ono znajdować się w spoczynku lub poruszać się jednostajnie po linii prostej. Dlatego możemy mówić o równowadze statycznej i dynamicznej.
DEFINICJA
Równowaga statyczna- to jest taka równowaga, gdy pod działaniem przyłożonych sił ciało jest w spoczynku.
równowaga dynamiczna- to jest taka równowaga, gdy pod działaniem sił ciało nie zmienia swojego ruchu.
W stanie równowagi statycznej jest zawieszona na linach latarnia dowolna konstrukcja budowlana. Jako przykład równowagi dynamicznej możemy rozważyć koło, które toczy się po płaskiej powierzchni przy braku sił tarcia.
Wynika z tego, że jeśli suma geometryczna wszystkich siły zewnętrzne przyłożony do ciała jest równy zeru, wtedy ciało jest w spoczynku lub wykonuje jednostajny ruch prostoliniowy. W tym przypadku zwyczajowo mówi się, że siły przyłożone do ciała równoważą się nawzajem. Podczas obliczania wypadkowej wszystkie siły działające na ciało można przyłożyć do środka masy.
Aby ciało nieobrotowe było w równowadze, konieczne jest, aby wypadkowa wszystkich sił przyłożonych do ciała była równa zero.
$(\overrightarrow(F))=(\overrightarrow(F_1))+(\overrightarrow(F_2))+...= 0$
Jeśli ciało może się obracać wokół jakiejś osi, to dla jego równowagi nie wystarczy, aby wypadkowa wszystkich sił była równa zeru.
Obrotowe działanie siły zależy nie tylko od jej wielkości, ale także od odległości między linią działania siły a osią obrotu.
Długość prostopadłej poprowadzonej od osi obrotu do linii działania siły nazywana jest ramieniem siły.
Iloczyn modułu siły $F$ i ramienia d nazywamy momentem siły M. Momenty tych sił, które mają tendencję do obracania ciała w kierunku przeciwnym do ruchu wskazówek zegara, są uważane za dodatnie.
Zasada momentów: ciało o ustalonej osi obrotu jest w równowadze, jeśli suma algebraiczna momentów wszystkich sił przyłożonych do ciała wokół tej osi wynosi zero:
W ogólnym przypadku, gdy ciało może poruszać się translacyjnie i obracać się, oba warunki muszą być spełnione dla równowagi: siła wypadkowa musi być równa zeru, a suma wszystkich momentów sił musi być równa zeru. Oba te warunki nie wystarczają na odpoczynek.
Rysunek 1. Równowaga obojętna. Koło toczące się po poziomej powierzchni. Siła wypadkowa i moment sił są równe zero
Przykładem równowagi obojętnej jest koło toczące się po powierzchni poziomej (rys. 1). Jeśli koło zostanie zatrzymane w dowolnym momencie, będzie w równowadze. Wraz z obojętną równowagą w mechanice wyróżnia się stany równowagi stabilnej i niestabilnej.
Stan równowagi nazywamy stabilnym, jeśli przy niewielkich odchyleniach ciała od tego stanu powstają siły lub momenty sił, które mają tendencję do przywracania ciała do stanu równowagi.
Przy niewielkim odchyleniu ciała od stanu równowagi niestabilnej powstają siły lub momenty sił, które mają tendencję do wyprowadzania ciała z położenia równowagi. Piłka leżąca na płaskiej poziomej powierzchni jest w stanie obojętnej równowagi.

Rysunek 2. Różne rodzaje równowagi piłki na podporze. (1) — równowaga obojętna, (2) — równowaga niestabilna, (3) — równowaga stabilna
Kula znajdująca się na szczycie kulistej półki jest przykładem równowagi niestabilnej. Wreszcie kulka na dnie kulistej wnęki znajduje się w stanie stabilnej równowagi (rys. 2).
W przypadku ciała o stałej osi obrotu możliwe są wszystkie trzy rodzaje równowagi. Równowaga obojętna występuje, gdy oś obrotu przechodzi przez środek masy. W stabilnej i niestabilnej równowadze środek masy znajduje się na linii pionowej przechodzącej przez oś obrotu. W tym przypadku, jeśli środek masy znajduje się poniżej osi obrotu, stan równowagi jest stabilny. Jeżeli środek masy znajduje się powyżej osi, stan równowagi jest niestabilny (rys. 3).

Rysunek 3. Równowaga stabilna (1) i niestabilna (2) jednorodnego okrągłego dysku nieruchomego na osi O; punkt C jest środkiem masy dysku; $(\overrightarrow(F))_t\ $-- grawitacja; $(\overrightarrow(F))_(y\ )$-- siła sprężystości osi; d – ramię
Szczególnym przypadkiem jest równowaga ciała na podporze. W tym przypadku siła sprężystości podpory nie jest przykładana do jednego punktu, ale rozkłada się na podstawie ciała. Ciało jest w równowadze, jeśli pionowa linia poprowadzona przez środek masy ciała przechodzi przez obszar podparcia, tj. wewnątrz konturu utworzonego przez linie łączące punkty podparcia. Jeśli linia ta nie przecina obszaru podparcia, ciało się przewraca.
Zadanie 1
Płaszczyzna pochyła jest nachylona pod kątem 30o do horyzontu (rys. 4). Jest na nim ciało P o masie m=2 kg. Tarcie można zaniedbać. Nić narzucona na klocek tworzy kąt 45o z pochyloną płaszczyzną. Przy jakim ciężarze ładunku Q ciało P będzie w równowadze?

Rysunek 4
Na ciało działają trzy siły: siła grawitacji P, naprężenie nici z obciążeniem Q oraz siła sprężystości F od strony napierającej na nią płaszczyzny w kierunku prostopadłym do płaszczyzny. Rozłóżmy siłę Р na składowe: $\overrightarrow(Р)=(\overrightarrow(Р))_1+(\overrightarrow(Р))_2$. Warunek $(\overrightarrow(P))_2=$ Dla równowagi, biorąc pod uwagę podwojenie wysiłku przez poruszający się blok, konieczne jest, aby $\overrightarrow(Q)=-(2\overrightarrow(P))_1$. Stąd warunek równowagi: $m_Q=2m(sin \widehat((\overrightarrow(P))_1(\overrightarrow(P))_2)\ )$. Podstawiając wartości, otrzymujemy: $m_Q=2\cdot 2(sin \left(90()^\circ -30()^\circ -45()^\circ \right)\ )=1.035\ kg$.
Na wietrze balon na uwięzi wisi nad innym punktem na Ziemi, do którego przymocowany jest kabel (ryc. 5). Naprężenie liny wynosi 200 kg, kąt z pionem a=30$()^\circ$. Jaka jest siła naporu wiatru?
\[(\overrightarrow(F))_in=-(\overrightarrow(T))_1;\ \ \ \ \left|(\overrightarrow(F))_in\right|=\left|(\overrightarrow(T)) _1\right|=Tg(sin (\mathbf \alpha )\ )\] \[\left|(\overrightarrow(F))_in\right|=\ 200\cdot 9.81\cdot (sin 30()^\circ \ )=981\ N\]

Ten wykład obejmuje następujące pytania:
1. Warunki równowagi układów mechanicznych.
2. Stabilność równowagi.
3. Przykład wyznaczania pozycji równowagi i badania ich stabilności.
Badanie tych zagadnień jest niezbędne do badania ruchów oscylacyjnych układu mechanicznego względem położenia równowagi w dyscyplinie „Części maszyn”, do rozwiązywania problemów w dyscyplinach „Teoria maszyn i mechanizmów” oraz „Wytrzymałość materiałów”.
Ważnym przypadkiem ruchu układów mechanicznych jest ich ruch oscylacyjny. Oscylacje to powtarzające się ruchy układu mechanicznego w odniesieniu do niektórych jego pozycji, występujące mniej więcej regularnie w czasie. Praca kursu uwzględnia ruch oscylacyjny układu mechanicznego względem położenia równowagi (względnego lub bezwzględnego).
Układ mechaniczny może oscylować przez wystarczająco długi okres czasu tylko w pobliżu pozycji stabilnej równowagi. Dlatego przed opracowaniem równań ruchu oscylacyjnego konieczne jest znalezienie pozycji równowagi i zbadanie ich stabilności.
Warunki równowagi dla układów mechanicznych.
Zgodnie z zasadą możliwe ruchy(podstawowe równanie statyki), aby układ mechaniczny, na który nałożono więzy idealne, stacjonarne, ograniczające i holonomiczne, był w równowadze, konieczne i wystarczające jest, aby wszystkie siły uogólnione w tym układzie były równe zeru:
gdzie jest uogólnioną siłą odpowiadającą J- o uogólniona współrzędna;
s- liczba współrzędnych uogólnionych w układzie mechanicznym.
Jeżeli dla badanego układu zestawiono różniczkowe równania ruchu w postaci równań Lagrange'a drugiego rodzaju, to do wyznaczenia możliwych pozycji równowagi wystarczy zrównać siły uogólnione z wartością zero i rozwiązać otrzymane równania względem uogólnione współrzędne.
Jeżeli układ mechaniczny jest w równowadze w potencjalnym polu sił, to z równań (1) otrzymujemy następujące warunki równowagi:
Dlatego w pozycji równowagi energia potencjalna ma ekstremalną wartość. Nie każda równowaga określona powyższymi wzorami może być realizowana w praktyce. W zależności od zachowania układu przy odchylaniu się od położenia równowagi mówi się o stabilności lub niestabilności tego położenia.
Stabilność równowagi
Definicja pojęcia stabilności pozycji równowagi została podana pod koniec XIX wieku w pracach rosyjskiego naukowca A. M. Lapunowa. Spójrzmy na tę definicję.
Aby uprościć obliczenia, uzgodnimy dalej współrzędne uogólnione Q 1 , Q 2 ,...,Q s liczyć od położenia równowagi układu:
gdzie
Pozycję równowagi nazywamy stabilną, jeśli dla dowolnej arbitralnie małej liczbymożesz znaleźć inny numer , że w przypadku, gdy początkowe wartości współrzędnych uogólnionych i prędkości nie przekroczą:
wartości współrzędnych uogólnionych i prędkości podczas dalszego ruchu układu nie przekroczą .
Innymi słowy, położenie równowagi układu Q 1 = Q 2 = ...= Q s= 0 nazywa się zrównoważony, jeśli zawsze można znaleźć tak dostatecznie małe wartości początkowe, przy którym ruch układunie pozostawi żadnego arbitralnie małego sąsiedztwa pozycji równowagi. Dla układu z jednym stopniem swobody ruch stabilny układu można wizualizować na płaszczyźnie fazowej (rys. 1).Dla stabilnej pozycji równowagi, ruch punktu reprezentatywnego, zaczynając od obszaru [ ] , nie wyjdzie poza obszar w przyszłości.

Rys.1
Pozycja równowagi nazywa się asymptotycznie stabilny , jeśli z czasem układ zbliży się do pozycji równowagi, czyli
Określenie warunków stabilności położenia równowagi jest dość trudnym zadaniem, więc ograniczamy się do najprostszego przypadku: badania stabilności równowagi układów zachowawczych.
Warunki dostateczne dla stabilności położeń równowagi dla takich układów są określone wzorem: Twierdzenie Lagrange'a - Dirichleta : pozycja równowagi konserwatywnego układu mechanicznego jest stabilna, jeśli w położeniu równowagi energia potencjalna układu ma izolowane minimum .
Energia potencjalna układu mechanicznego jest określona do stałej. Dobieramy tę stałą tak, aby w pozycji równowagi energia potencjalna był równy zero:
P(0)=0.
Wówczas dla układu o jednym stopniu swobody warunkiem wystarczającym istnienia minimum izolowanego wraz z warunkiem koniecznym (2) jest warunek
Ponieważ w pozycji równowagi energia potencjalna ma izolowane minimum i P(0)=0 , a potem w jakimś skończonym sąsiedztwie tej pozycji
П(q)=0.
Funkcje, które mają znak stałej i są równe zero tylko wtedy, gdy wszystkie ich argumenty mają wartość zero, są wywoływane znak-określony. Dlatego, aby położenie równowagi układu mechanicznego było stabilne, konieczne i wystarczające jest, aby w pobliżu tego położenia energia potencjalna była dodatnio zdefiniowaną funkcją współrzędnych uogólnionych.
W przypadku układów liniowych i układów, które można zredukować do liniowych dla małych odchyleń od położenia równowagi (zlinearyzowanych), energię potencjalną można przedstawić w postaci kwadratowej współrzędnych uogólnionych

gdzie - uogólnione współczynniki sztywności.
Współczynniki uogólnionesą liczbami stałymi, które można wyznaczyć bezpośrednio z rozwinięcia energii potencjalnej w szereg lub z wartości drugich pochodnych energii potencjalnej względem uogólnionych współrzędnych w położeniu równowagi:
Ze wzoru (4) wynika, że uogólnione współczynniki sztywności są symetryczne względem wskaźników
Do , aby spełnić wystarczające warunki dla stabilności położenia równowagi, energia potencjalna musi być dodatnio określoną kwadratową formą jej uogólnionych współrzędnych.
W matematyce jest Kryterium Sylwestra , który daje konieczne i wystarczające warunki dla dodatniej określoności form kwadratowych: forma kwadratowa (3) będzie dodatnio określona, jeśli wyznacznik składający się z jego współczynników i wszystkich jego głównych ukośnych mniejszych są dodatnie, tj. jeśli współczynniki spełni warunki
![]()
.....

W szczególności dla układ liniowy przy dwóch stopniach swobody energia potencjalna i warunki kryterium Sylwestra będą miały postać
W podobny sposób można badać pozycje równowagi względnej, jeśli zamiast energii potencjalnej uwzględni się energię potencjalną układu zredukowanego.
P Przykład wyznaczania pozycji równowagi i badania ich stabilności

Rys.2
Rozważać układ mechaniczny składający się z tuby AB, który jest osią OO 1 połączony z poziomą osią obrotu i kulą, która porusza się przez rurkę bez tarcia i jest połączona z punktem A rurki ze sprężyną (rys. 2). Wyznaczmy położenia równowagi układu i oceńmy ich stabilność dla następujących parametrów: długość rury l 2 = 1 m , długość pręta l1 = 0,5 m . niezdeformowana długość sprężyny ja 0 = 0,6 m, sztywność sprężyny C= 100 N/m. Waga rury m 2 = 2 kg, pręt - m 1 = 1 kg i piłka - m 3 = 0,5 kg. Dystans OA równa się ja 3 = 0,4 m.
Napiszmy wyrażenie na energię potencjalną rozważanego układu. Składa się z energii potencjalnej trzech ciał w jednorodnym polu grawitacyjnym oraz energii potencjalnej odkształconej sprężyny.
Energia potencjalna ciała w polu grawitacji jest równa iloczynowi masy ciała i wysokości jego środka ciężkości nad płaszczyzną, w której energia potencjalna jest równa zeru. Niech energia potencjalna w płaszczyźnie przechodzącej przez oś obrotu pręta będzie równa zeru OO 1, a następnie grawitacja
W przypadku siły sprężystej energia potencjalna jest określona przez wielkość odkształcenia
![]()
Znajdźmy możliwe położenia równowagi układu. Wartości współrzędnych w pozycjach równowagi są pierwiastkami następującego układu równań.

Podobny układ równań można skompilować dla dowolnego układu mechanicznego o dwóch stopniach swobody. W niektórych przypadkach możliwe jest uzyskanie dokładnego rozwiązania systemu. Dla systemu (5) takie rozwiązanie nie istnieje, więc pierwiastków należy szukać metodami numerycznymi.
Rozwiązując układ równań transcendentalnych (5), otrzymujemy dwie możliwe pozycje równowagi:
Aby ocenić stabilność otrzymanych pozycji równowagi, znajdujemy wszystkie drugie pochodne energii potencjalnej względem uogólnionych współrzędnych i wyznaczamy z nich uogólnione współczynniki sztywności.
![]()
Ciało znajduje się w spoczynku (lub porusza się jednostajnie i po linii prostej), jeśli suma wektorów wszystkich działających na nie sił wynosi zero. Mówi się, że siły się równoważą. Kiedy mamy do czynienia z ciałem o określonym kształcie geometrycznym, przy obliczaniu siły wypadkowej wszystkie siły można przyłożyć do środka masy ciała.
Warunek równowagi ciał
Aby ciało, które nie obraca się, było w równowadze, konieczne jest, aby wypadkowa wszystkich działających na nie sił była równa zeru.
F → = F 1 → + F 2 → + . . + Fn → = 0 .
Powyższy rysunek przedstawia saldo ciało stałe. Blok znajduje się w stanie równowagi pod działaniem trzech działających na niego sił. Linie działania sił F 1 → i F 2 → przecinają się w punkcie O. Punktem przyłożenia siły ciężkości jest środek masy ciała C. Punkty te leżą na jednej prostej, a przy obliczaniu siły wypadkowej F 1 → , F 2 → i mg → sprowadza się do punktu C .
Warunek, że wypadkowa wszystkich sił jest równa zeru, nie wystarcza, jeśli ciało może się obracać wokół jakiejś osi.
Ramię siły d to długość prostopadłej poprowadzonej od linii działania siły do punktu jej przyłożenia. Moment siły M jest iloczynem ramienia siły i jej modułu.
Moment siły ma tendencję do obracania ciała wokół własnej osi. Te momenty, które obracają ciało w kierunku przeciwnym do ruchu wskazówek zegara, są uważane za pozytywne. Jednostka miary momentu siły w międzynarodowy system C - 1 Nm e t r.
Definicja. reguła chwili
Jeżeli suma algebraiczna wszystkich momentów przyłożonych do ciała względem ustalonej osi obrotu jest równa zeru, to ciało jest w równowadze.
M1 + M2 + . . + Mn = 0

Ważny!
W ogólnym przypadku dla równowagi ciał muszą być spełnione dwa warunki: siła wypadkowa jest równa zeru i przestrzegana jest zasada momentów.
W mechanice istnieją różne rodzaje równowagi. W ten sposób rozróżnia się równowagę stabilną i niestabilną, a także obojętną.

Typowym przykładem obojętnej równowagi jest toczące się koło (lub kula), które zatrzymane w dowolnym punkcie będzie w stanie równowagi.
Równowaga stabilna to taka równowaga ciała, w której przy jego niewielkich odchyleniach powstają siły lub momenty sił, które mają tendencję do przywracania ciała do stanu równowagi.
Równowaga niestabilna - stan równowagi, z niewielkim odchyleniem, od którego siły i momenty sił jeszcze bardziej wytrącają ciało z równowagi.

Na powyższym rysunku położenie kuli to (1) - równowaga obojętna, (2) - równowaga niestabilna, (3) - równowaga stabilna.
ciało z oś stała obrót może znajdować się w dowolnej z opisanych pozycji równowagi. Jeśli oś obrotu przechodzi przez środek masy, istnieje równowaga obojętna. W stabilnej i niestabilnej równowadze środek masy znajduje się na linii pionowej przechodzącej przez oś obrotu. Gdy środek masy znajduje się poniżej osi obrotu, równowaga jest stabilna. W przeciwnym razie odwrotnie.

Szczególnym przypadkiem równowagi jest równowaga ciała na podporze. W tym przypadku siła sprężystości rozkłada się na całą podstawę ciała i nie przechodzi przez jeden punkt. Ciało jest w stanie spoczynku w równowadze, gdy pionowa linia poprowadzona przez środek masy przecina obszar podparcia. W przeciwnym razie, jeśli linia ze środka masy nie wpadnie w kontur utworzony przez linie łączące punkty podparcia, ciało się wywróci.
Przykładem równowagi ciała na podporze jest słynna Krzywa Wieża w Pizie. Według legendy Galileo Galilei upuścił z niej piłki, gdy przeprowadzał swoje eksperymenty na studiach swobodny spadek tel.

Linia poprowadzona od środka masy wieży przecina podstawę w odległości około 2,3 m od jej środka.
Jeśli zauważysz błąd w tekście, zaznacz go i naciśnij Ctrl+Enter
Klasa: 10
Prezentacja na lekcję






























 Wstecz do przodu
Wstecz do przodu
Uwaga! Podgląd slajdu służy wyłącznie do celów informacyjnych i może nie przedstawiać pełnego zakresu prezentacji. Jeśli jesteś zainteresowany tą pracą, pobierz pełną wersję.
Cele Lekcji: Zbadanie stanu równowagi ciał, zapoznanie się z różnymi typami równowagi; dowiedzieć się, w jakich warunkach ciało jest w równowadze.
Cele Lekcji:
- Trening: Zbadanie dwóch warunków równowagi, rodzajów równowagi (stabilnej, niestabilnej, obojętnej). Dowiedz się, w jakich warunkach ciała są bardziej stabilne.
- Rozwijanie: Promowanie rozwoju zainteresowania poznawczego fizyką. Rozwój umiejętności porównywania, uogólniania, podkreślania najważniejszej rzeczy, wyciągania wniosków.
- Edukacyjny: Kultywowanie uwagi, umiejętność wyrażania własnego punktu widzenia i jego obrony, rozwijanie umiejętności komunikacyjnych uczniów.
Rodzaj lekcji: lekcja uczenia się nowego materiału ze wsparciem komputerowym.
Ekwipunek:
- Dysk „Praca i moc” z „Lekcje i testy elektroniki”.
- Tabela „Warunki równowagi”.
- Pryzmat nachylony pionem.
- Ciała geometryczne: walec, sześcian, stożek itp.
- Komputer, projektor multimedialny, tablica interaktywna lub ekran.
- Prezentacja.
Podczas zajęć
Dziś na lekcji dowiemy się, dlaczego żuraw nie spada, dlaczego zabawka Roly-Vstanka zawsze wraca do pierwotnego stanu, dlaczego Krzywa Wieża w Pizie nie spada?
I. Powtarzanie i aktualizacja wiedzy.
- Sformułuj pierwsze prawo Newtona. Jaki jest status prawa?
- Na jakie pytanie odpowiada drugie prawo Newtona? Formuła i sformułowanie.
- Na jakie pytanie odpowiada trzecie prawo Newtona? Formuła i sformułowanie.
- Jaka jest siła wypadkowa? Co z nią?
- Z dysku „Ruch i oddziaływanie ciał” wykonaj zadanie nr 9 „Wypadkowa sił o różnych kierunkach” (zasada dodawania wektorów (2, 3 ćwiczenia)).
II. Nauka nowego materiału.
1. Co nazywa się równowagą?
Równowaga to stan spoczynku.
2. Warunki równowagi.(slajd 2)
a) Kiedy ciało odpoczywa? Z jakiego prawa to pochodzi?
Pierwszy warunek równowagi: Ciało jest w równowadze, jeśli geometryczna suma sił zewnętrznych przyłożonych do ciała wynosi zero. ∑ F = 0
b) Niech na planszę działają dwie równe siły, jak pokazano na rysunku.

Czy będzie w równowadze? (Nie, ona się odwróci)
W spoczynku jest tylko punkt centralny a reszta jest w ruchu. Oznacza to, że aby ciało było w równowadze, konieczne jest, aby suma wszystkich sił działających na każdy element była równa 0.
Drugi warunek równowagi: Suma momentów sił działających zgodnie z ruchem wskazówek zegara musi być równa sumie momentów sił działających przeciwnie do ruchu wskazówek zegara.
∑ M zgodnie z ruchem wskazówek zegara = ∑ M przeciwnie do ruchu wskazówek zegara
Moment siły: M = F L
L - ramię siły - najkrótsza odległość od punktu podparcia do linii działania siły.
3. Środek ciężkości ciała i jego położenie.(slajd 4)
Środek ciężkości ciała- jest to punkt, przez który przechodzi wypadkowa wszystkich równoległych sił grawitacyjnych działających na poszczególne elementy ciała (w dowolnym położeniu ciała w przestrzeni).
Znajdź środek ciężkości następujących figur:

4. Rodzaje sald.
a) (slajdy 5-8)


Wniosek: Równowaga jest stabilna, jeśli przy niewielkim odchyleniu od położenia równowagi istnieje siła dążąca do przywrócenia jej do tego położenia.
Pozycja, w której jego energia potencjalna jest minimalna, jest stabilna. (slajd 9)
b) Stabilność ciał znajdujących się w punkcie lub na punkcie.(slajdy 10-17)

Wniosek: Dla stateczności ciała znajdującego się na jednym punkcie lub linii podparcia konieczne jest, aby środek ciężkości znajdował się poniżej punktu (linii) podparcia.
c) Stabilność ciał na płaskiej powierzchni.
(slajd 18)
1) Powierzchnia nośna- nie zawsze jest to powierzchnia stykająca się z ciałem (ale ograniczona liniami łączącymi nogi stołu, statywu)

2) Analiza slajdu z „Lekcje i testy elektroniki”, dysk „Praca i moc”, lekcja „Rodzaje równowagi”.
Obrazek 1.
- Czym różnią się stołki? (stopa kwadratowa)
- Który jest bardziej stabilny? (o większej powierzchni)
- Czym różnią się stołki? (Położenie środka ciężkości)
- Który jest najbardziej stabilny? (który środek ciężkości jest niżej)
- Czemu? (Ponieważ można go odchylić pod większym kątem bez przewracania)
3) Doświadczenie z odchylającym się pryzmatem
- Połóżmy na desce pryzmat z pionem i zacznijmy go stopniowo podnosić ponad jedną krawędź. Co widzimy?
- Dopóki pion przecina powierzchnię ograniczoną podporą, równowaga jest zachowana. Ale gdy tylko pion przechodzący przez środek ciężkości zaczyna wychodzić poza granice powierzchni nośnej, regał się przewraca.
Rozbiór gramatyczny zdania slajdy 19–22.

Wnioski:
- Ciało o największej powierzchni podparcia jest stabilne.
- Z dwóch ciał o tej samej powierzchni ciało, którego środek ciężkości jest niższy, jest stabilne, ponieważ można go odchylić bez przewracania się pod dużym kątem.
Rozbiór gramatyczny zdania slajdy 23–25.

Które statki są najbardziej stabilne? Czemu? (dla których ładunek znajduje się w ładowniach, a nie na pokładzie)

Jakie samochody są najbardziej stabilne? Czemu? (Aby zwiększyć stabilność samochodów na zakrętach, jezdnię przechyla się w kierunku zakrętu.)
Wnioski: Równowaga może być stabilna, niestabilna, obojętna. Stabilność korpusów jest tym większa, im większa powierzchnia podparcia i niższy środek ciężkości.
III. Zastosowanie wiedzy o stateczności ciał.
- Jakie specjalności najbardziej potrzebują wiedzy o równowadze ciał?
- Projektanci i projektanci różnych konstrukcji ( wysokie budynki, mosty, wieże telewizyjne itp.)
- Artyści cyrkowi.
- Kierowcy i inni profesjonaliści.
(slajdy 28–30)
- Dlaczego Roly-Vstanka wraca do pozycji równowagi przy każdym przechyleniu zabawki?
- Dlaczego Krzywa Wieża w Pizie jest przechylona i nie spada?
- Jak rowerzyści i motocykliści utrzymują równowagę?
Lekcje na wynos:
- Istnieją trzy rodzaje równowagi: stabilna, niestabilna, obojętna.
- Pozycja ciała jest stabilna, w której jego energia potencjalna jest minimalna.
- Stabilność ciał na płaskiej powierzchni jest tym większa, im większa powierzchnia podparcia i niższy środek ciężkości.
Praca domowa: § 54 – 56 (G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky)
Wykorzystane źródła i literatura:
- G.Ya. Myakishev, B.B. Buchowcew, N.N. Socki. Fizyka. Klasa 10.
- Taśma filmowa "Stabilność" 1976 (zeskanowana przeze mnie skanerem filmowym).
- Dysk „Ruch i interakcja ciał” z „Lekcje i testy elektroniki”.
- Dysk „Praca i moc” z „Lekcje i testy elektroniki”.
- W kontakcie z 0
- Google Plus 0
- ok 0
- Facebook 0