DEFINIZIONE
equilibrio sostenibile- questo è un equilibrio in cui il corpo, sbilanciato e abbandonato a se stesso, ritorna nella sua posizione precedente.
Ciò si verifica se, con un leggero spostamento del corpo in qualsiasi direzione dalla posizione iniziale, la risultante delle forze agenti sul corpo diventa diversa da zero e si dirige verso la posizione di equilibrio. Ad esempio, una palla che giace sul fondo di una cavità sferica (Fig. 1a).
DEFINIZIONE
Equilibrio instabile- questo è un equilibrio in cui il corpo, tolto dalla posizione di equilibrio e lasciato a se stesso, si discosterà ancora di più dalla posizione di equilibrio.
In questo caso, con un piccolo spostamento del corpo dalla posizione di equilibrio, la risultante delle forze applicate ad esso è diversa da zero ed è diretta dalla posizione di equilibrio. Un esempio è una palla situata alla sommità di una superficie sferica convessa (Fig. 1 b).
DEFINIZIONE
Equilibrio indifferente- questo è un equilibrio in cui il corpo, sbilanciato e abbandonato a se stesso, non cambia posizione (stato).
In questo caso, con piccoli spostamenti del corpo dalla sua posizione originaria, la risultante delle forze applicate al corpo rimane uguale a zero. Ad esempio, una palla che giace su una superficie piana (Fig. 1, c).
Fig. 1. Diversi tipi di equilibrio corporeo su un supporto: a) equilibrio stabile; b) equilibrio instabile; c) equilibrio indifferente.
Equilibrio statico e dinamico dei corpi
Se, a causa dell'azione delle forze, il corpo non riceve accelerazione, può essere fermo o muoversi uniformemente in linea retta. Si può quindi parlare di equilibrio statico e dinamico.
DEFINIZIONE
Equilibrio statico- questo è un tale equilibrio quando, sotto l'azione delle forze applicate, il corpo è a riposo.
equilibrio dinamico- questo è un tale equilibrio quando, sotto l'azione delle forze, il corpo non cambia il suo movimento.
In uno stato di equilibrio statico è una lanterna sospesa su cavi, qualsiasi struttura edilizia. Come esempio di equilibrio dinamico, possiamo considerare una ruota che rotola su una superficie piana in assenza di forze di attrito.
Ne consegue che se la somma geometrica di tutti forze esterne applicato al corpo è uguale a zero, quindi il corpo è fermo o esegue un moto rettilineo uniforme. In questo caso, è consuetudine dire che le forze applicate al corpo si equilibrano a vicenda. Quando si calcola la risultante, tutte le forze che agiscono sul corpo possono essere applicate al baricentro.
Affinché un corpo non rotante sia in equilibrio, è necessario che la risultante di tutte le forze applicate al corpo sia uguale a zero.
$(\overrightarrow(F))=(\overrightarrow(F_1))+(\overrightarrow(F_2))+...= 0$
Se un corpo può ruotare attorno a qualche asse, per il suo equilibrio non è sufficiente che la risultante di tutte le forze sia uguale a zero.
L'azione rotante di una forza dipende non solo dalla sua intensità, ma anche dalla distanza tra la linea d'azione della forza e l'asse di rotazione.
La lunghezza della perpendicolare tracciata dall'asse di rotazione alla linea d'azione della forza è chiamata braccio della forza.
Il prodotto del modulo di forza $F$ per il braccio d è detto momento di forza M. Si considerano positivi i momenti di quelle forze che tendono a ruotare il corpo in senso antiorario.
La regola dei momenti: un corpo con un asse di rotazione fisso è in equilibrio se la somma algebrica dei momenti di tutte le forze applicate al corpo attorno a questo asse è zero:
Nel caso generale, quando un corpo può muoversi traslativamente e ruotare, entrambe le condizioni devono essere soddisfatte per l'equilibrio: la forza risultante deve essere uguale a zero e la somma di tutti i momenti delle forze deve essere uguale a zero. Entrambe queste condizioni non sono sufficienti per il riposo.
Figura 1. Equilibrio indifferente. Rotolamento della ruota su una superficie orizzontale. La forza risultante e il momento delle forze sono uguali a zero
Una ruota che rotola su una superficie orizzontale è un esempio di equilibrio indifferente (Fig. 1). Se la ruota si ferma in qualsiasi momento, sarà in equilibrio. Insieme all'equilibrio indifferente in meccanica, si distinguono stati di equilibrio stabile e instabile.
Uno stato di equilibrio si dice stabile se, con piccole deviazioni del corpo da questo stato, sorgono forze o momenti di forza che tendono a riportare il corpo in uno stato di equilibrio.
Con una piccola deviazione del corpo dallo stato di equilibrio instabile, sorgono forze o momenti di forza che tendono a rimuovere il corpo dalla posizione di equilibrio. Una palla che giace su una superficie piana orizzontale è in uno stato di equilibrio indifferente.

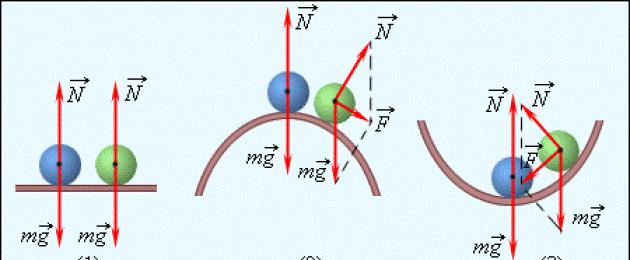
Figura 2. Diversi tipi di equilibrio di una palla su un supporto. (1) -- equilibrio indifferente, (2) -- equilibrio instabile, (3) -- equilibrio stabile
Una palla situata in cima a una sporgenza sferica è un esempio di equilibrio instabile. Infine, la sfera sul fondo della cavità sferica si trova in uno stato di equilibrio stabile (Fig. 2).
Per un corpo con un asse di rotazione fisso, sono possibili tutti e tre i tipi di equilibrio. L'equilibrio indifferente si verifica quando l'asse di rotazione passa per il centro di massa. In equilibrio stabile e instabile, il baricentro si trova su una linea verticale passante per l'asse di rotazione. In questo caso, se il baricentro è al di sotto dell'asse di rotazione, lo stato di equilibrio è stabile. Se il centro di massa si trova sopra l'asse, lo stato di equilibrio è instabile (Fig. 3).

Figura 3. Equilibrio stabile (1) e instabile (2) di un disco circolare omogeneo fissato sull'asse O; il punto C è il centro di massa del disco; $(\overrightarrow(F))_t\ $-- gravità; $(\overrightarrow(F))_(y\ )$-- forza elastica dell'asse; d -- spalla
Un caso particolare è l'equilibrio di un corpo su un supporto. In questo caso, la forza elastica del supporto non viene applicata in un punto, ma viene distribuita sulla base del corpo. Il corpo è in equilibrio se una linea verticale tracciata attraverso il baricentro del corpo passa attraverso l'area di appoggio, cioè all'interno del contorno formato da linee che collegano i punti di appoggio. Se questa linea non attraversa l'area di supporto, il corpo si ribalta.
Compito 1
Il piano inclinato è inclinato di un angolo di 30° rispetto all'orizzonte (Fig. 4). C'è un corpo P su di esso, la cui massa è m=2 kg. L'attrito può essere trascurato. Il filo lanciato sopra il blocco forma un angolo di 45° con il piano inclinato. A quale peso del carico Q il corpo P sarà in equilibrio?

Figura 4
Il corpo è sotto l'azione di tre forze: la forza di gravità P, la tensione del filo con il carico Q e la forza elastica F dal lato del piano che preme su di esso nella direzione perpendicolare al piano. Scomponiamo la forza Р in componenti: $\overrightarrow(Р)=(\overrightarrow(Р))_1+(\overrightarrow(Р))_2$. Condizione $(\overrightarrow(P))_2=$ Per l'equilibrio, tenendo conto del raddoppio dello sforzo del blocco in movimento, è necessario che $\overrightarrow(Q)=-(2\overrightarrow(P))_1$. Da qui la condizione di equilibrio: $m_Q=2m(sin \widehat((\overrightarrow(P))_1(\overrightarrow(P))_2)\ )$. Sostituendo i valori, otteniamo: $m_Q=2\cdot 2(sin \left(90()^\circ -30()^\circ -45()^\circ \right)\ )=1.035\ kg$.
Nel vento, il palloncino legato è sospeso su un punto diverso della Terra, a cui è attaccato il cavo (Fig. 5). La tensione del cavo è di 200 kg, l'angolo con la verticale è a=30$()^\circ$. Qual è la forza della pressione del vento?
\[(\overrightarrow(F))_in=-(\overrightarrow(T))_1;\ \ \ \ \left|(\overrightarrow(F))_in\right|=\left|(\overrightarrow(T)) _1\right|=Tg(sin (\mathbf \alpha )\ )\] \[\left|(\overrightarrow(F))_in\right|=\ 200\cdot 9.81\cdot (sin 30()^\circ \ )=981\ N\]

Questa lezione copre le seguenti domande:
1. Condizioni per l'equilibrio dei sistemi meccanici.
2. Stabilità dell'equilibrio.
3. Un esempio per determinare le posizioni di equilibrio e studiarne la stabilità.
Lo studio di queste problematiche è necessario per studiare i movimenti oscillatori di un sistema meccanico rispetto alla posizione di equilibrio nella disciplina "Parti di macchina", per risolvere problemi nelle discipline "Teoria delle macchine e dei meccanismi" e "Forza dei materiali".
Un caso importante di moto dei sistemi meccanici è il loro moto oscillatorio. Le oscillazioni sono movimenti ripetuti di un sistema meccanico rispetto ad alcune sue posizioni, che si verificano più o meno regolarmente nel tempo. Il lavoro del corso considera il moto oscillatorio di un sistema meccanico rispetto alla posizione di equilibrio (relativa o assoluta).
Un sistema meccanico può oscillare per un periodo di tempo sufficientemente lungo solo in prossimità di una posizione di equilibrio stabile. Pertanto, prima di compilare le equazioni del moto oscillatorio, è necessario trovare le posizioni di equilibrio e studiarne la stabilità.
Condizioni di equilibrio per sistemi meccanici.
Secondo il principio possibili movimenti(l'equazione di base della statica), affinché un sistema meccanico, su cui sono imposti vincoli ideali, stazionari, confinanti e olonomi, per essere in equilibrio, è necessario e sufficiente che tutte le forze generalizzate in questo sistema siano uguali a zero:
dove è la forza generalizzata corrispondente a J- oh coordinata generalizzata;
S- il numero di coordinate generalizzate nel sistema meccanico.
Se per il sistema in esame sono state compilate equazioni differenziali del moto sotto forma di equazioni di Lagrange del secondo tipo, per determinare le possibili posizioni di equilibrio è sufficiente eguagliare a zero le forze generalizzate e risolvere le equazioni risultanti rispetto a le coordinate generalizzate.
Se il sistema meccanico è in equilibrio in un campo di forze potenziali, dalle equazioni (1) otteniamo le seguenti condizioni di equilibrio:
Pertanto, nella posizione di equilibrio, l'energia potenziale ha un valore estremo. Non tutti gli equilibri definiti dalle formule di cui sopra possono essere realizzati nella pratica. A seconda del comportamento del sistema quando devia dalla posizione di equilibrio, si parla di stabilità o instabilità di questa posizione.
Stabilità dell'equilibrio
La definizione del concetto di stabilità di una posizione di equilibrio fu data alla fine del XIX secolo nelle opere dello scienziato russo A. M. Lyapunov. Diamo un'occhiata a questa definizione.
Per semplificare i calcoli, concorderemo ulteriormente sulle coordinate generalizzate Q 1 , Q 2 ,...,Q S contare dalla posizione di equilibrio del sistema:
dove
Una posizione di equilibrio si dice stabile se per un numero arbitrariamente piccolopuoi trovare un altro numero , che nel caso in cui i valori iniziali delle coordinate e delle velocità generalizzate non superino:
i valori di coordinate e velocità generalizzate durante l'ulteriore movimento del sistema non supereranno .
In altre parole, la posizione di equilibrio del sistema Q 1 = Q 2 = ...= Q s= 0 viene chiamato sostenibile, se è sempre possibile trovare valori iniziali così sufficientemente piccoli, in cui il movimento del sistemanon lascerà alcun dato intorno arbitrariamente piccolo della posizione di equilibrio. Per un sistema con un grado di libertà, il movimento stabile del sistema può essere visualizzato nel piano delle fasi (Fig. 1).Per una posizione di equilibrio stabile, il movimento del punto rappresentativo, a partire dalla regione [ ] , non andrà oltre l'area in futuro.

Fig. 1
Viene chiamata la posizione di equilibrio stabile asintoticamente , se nel tempo il sistema si avvicinerà alla posizione di equilibrio, cioè
Determinare le condizioni per la stabilità di una posizione di equilibrio è un compito piuttosto difficile, quindi ci limitiamo al caso più semplice: lo studio della stabilità dell'equilibrio dei sistemi conservativi.
Condizioni sufficienti per la stabilità delle posizioni di equilibrio per tali sistemi sono definite da Teorema di Lagrange - Dirichlet : la posizione di equilibrio di un sistema meccanico conservativo è stabile se, nella posizione di equilibrio, l'energia potenziale del sistema ha un minimo isolato .
L'energia potenziale di un sistema meccanico è determinata fino a una costante. Scegliamo questa costante in modo che nella posizione di equilibrio energia potenziale era uguale a zero:
P(0)=0.
Allora, per un sistema con un grado di libertà, condizione sufficiente per l'esistenza di un minimo isolato, insieme alla condizione necessaria (2), è la condizione
Poiché nella posizione di equilibrio l'energia potenziale ha un minimo isolato e P(0)=0 , quindi in qualche quartiere finito di questa posizione
Ï(q)=0.
Vengono chiamate le funzioni che hanno un segno costante e sono uguali a zero solo quando tutti i loro argomenti sono zero segno-definito. Pertanto, affinché la posizione di equilibrio di un sistema meccanico sia stabile, è necessario e sufficiente che, in prossimità di tale posizione, l'energia potenziale sia una funzione definita positivamente di coordinate generalizzate.
Per i sistemi lineari e per i sistemi che possono essere ridotti a lineari per piccoli scostamenti dalla posizione di equilibrio (linearizzati), l'energia potenziale può essere rappresentata come una forma quadratica di coordinate generalizzate

dove - coefficienti di rigidità generalizzati.
Coefficienti generalizzatisono numeri costanti che possono essere determinati direttamente dall'espansione dell'energia potenziale in una serie o dai valori delle derivate seconde dell'energia potenziale rispetto alle coordinate generalizzate nella posizione di equilibrio:
Dalla formula (4) risulta che i coefficienti di rigidezza generalizzati sono simmetrici rispetto agli indici
Per quello , per soddisfare condizioni sufficienti per la stabilità della posizione di equilibrio, l'energia potenziale deve essere una forma quadratica definita positiva delle sue coordinate generalizzate.
In matematica c'è Il criterio di Silvestro , che fornisce condizioni necessarie e sufficienti per la definitività positiva delle forme quadratiche: la forma quadratica (3) sarà definita positiva se il determinante composto dai suoi coefficienti e tutte le sue principali diagonali minori sono positive, cioè se i coefficienti soddisferà le condizioni
![]()
.....

In particolare, per sistema lineare con due gradi di libertà, avranno la forma l'energia potenziale e le condizioni del criterio di Silvestro
In modo simile si possono studiare le posizioni di equilibrio relativo se, al posto dell'energia potenziale, si introduce l'energia potenziale del sistema ridotto.
P Un esempio per determinare le posizioni di equilibrio e studiarne la stabilità

Fig.2
Ritenere sistema meccanico costituito da un tubo AB, che è il perno OO 1 collegata all'asse di rotazione orizzontale, e una sfera che si muove attraverso il tubo senza attrito ed è collegata a un punto UN tubi con una molla (Fig. 2). Determiniamo le posizioni di equilibrio del sistema e valutiamo la loro stabilità per i seguenti parametri: lunghezza del tubo l 2 = 1 m , lunghezza della canna l 1 = 0,5 m . lunghezza della molla indeformata l 0 = 0,6 m, tasso di primavera C= 100 N/m. Peso del tubo m 2 = 2 kg, asta - m 1 = 1 kg e palla - m 3 = 0,5 kg. Distanza OAè uguale a l 3 = 0,4 m.
Scriviamo un'espressione per l'energia potenziale del sistema in esame. Consiste nell'energia potenziale di tre corpi in un campo gravitazionale uniforme e nell'energia potenziale di una molla deformata.
L'energia potenziale di un corpo nel campo di gravità è uguale al prodotto del peso del corpo per l'altezza del suo baricentro sopra il piano in cui l'energia potenziale è considerata zero. Lascia che l'energia potenziale sia zero nel piano passante per l'asse di rotazione dell'asta OO 1, quindi per gravità
Per la forza elastica, l'energia potenziale è determinata dalla quantità di deformazione
![]()
Troviamo le possibili posizioni di equilibrio del sistema. I valori delle coordinate nelle posizioni di equilibrio sono le radici del seguente sistema di equazioni.

Un simile sistema di equazioni può essere compilato per qualsiasi sistema meccanico con due gradi di libertà. In alcuni casi è possibile ottenere una soluzione esatta del sistema. Per il sistema (5), tale soluzione non esiste, quindi le radici devono essere ricercate utilizzando metodi numerici.
Risolvendo il sistema di equazioni trascendentali (5), otteniamo due possibili posizioni di equilibrio:
Per valutare la stabilità delle posizioni di equilibrio ottenute, troviamo tutte le derivate seconde dell'energia potenziale rispetto alle coordinate generalizzate e da esse determiniamo i coefficienti di rigidità generalizzata.
![]()
Un corpo è fermo (o si muove uniformemente e in linea retta) se la somma vettoriale di tutte le forze agenti su di esso è zero. Si dice che le forze si equilibrano a vicenda. Quando abbiamo a che fare con un corpo di una certa forma geometrica, quando si calcola la forza risultante, tutte le forze possono essere applicate al centro di massa del corpo.
La condizione per l'equilibrio dei corpi
Affinché un corpo che non ruota sia in equilibrio, è necessario che la risultante di tutte le forze agenti su di esso sia uguale a zero.
FA → = FA 1 → + FA 2 → + . . + F n → = 0 .
La figura sopra mostra il saldo corpo solido. Il blocco è in uno stato di equilibrio sotto l'azione di tre forze che agiscono su di esso. Le linee di azione delle forze F 1 → e F 2 → si intersecano nel punto O. Il punto di applicazione della gravità è il baricentro del corpo C. Questi punti giacciono su una retta e quando si calcola la forza risultante F 1 → , F 2 → e m g → vengono ridotti al punto C .
La condizione che la risultante di tutte le forze sia uguale a zero non è sufficiente se il corpo può ruotare attorno a un asse.
La spalla della forza d è la lunghezza della perpendicolare tracciata dalla linea d'azione della forza al punto della sua applicazione. Il momento della forza M è il prodotto del braccio della forza e del suo modulo.
Il momento di forza tende a ruotare il corpo attorno al proprio asse. Sono considerati positivi quei momenti che ruotano il corpo in senso antiorario. L'unità di misura del momento di forza in sistema internazionale C - 1 N m e t r.
Definizione. regola del momento
Se la somma algebrica di tutti i momenti applicati al corpo rispetto all'asse fisso di rotazione è uguale a zero, allora il corpo è in equilibrio.
M1+M2+. . + M n = 0

Importante!
Nel caso generale, per l'equilibrio dei corpi devono essere soddisfatte due condizioni: la forza risultante è uguale a zero e la regola dei momenti è rispettata.
Ci sono diversi tipi di equilibrio in meccanica. Pertanto, viene fatta una distinzione tra equilibrio stabile e instabile, nonché equilibrio indifferente.

Un tipico esempio di equilibrio indifferente è una ruota (o palla) che rotola, che, se ferma in qualsiasi punto, si troverà in uno stato di equilibrio.
L'equilibrio stabile è un tale equilibrio di un corpo quando, con le sue piccole deviazioni, sorgono forze o momenti di forza che tendono a riportare il corpo in uno stato di equilibrio.
Equilibrio instabile - uno stato di equilibrio, con una piccola deviazione da cui le forze e i momenti delle forze tendono a sbilanciare ancora di più il corpo.

Nella figura sopra, la posizione della palla è (1) - equilibrio indifferente, (2) - equilibrio instabile, (3) - equilibrio stabile.
corpo con asse fisso la rotazione può essere in una qualsiasi delle posizioni di equilibrio descritte. Se l'asse di rotazione passa per il baricentro si ha un equilibrio indifferente. In equilibrio stabile e instabile, il baricentro si trova su una linea verticale che passa per l'asse di rotazione. Quando il baricentro è al di sotto dell'asse di rotazione, l'equilibrio è stabile. Altrimenti, viceversa.

Un caso speciale di equilibrio è l'equilibrio di un corpo su un supporto. In questo caso, la forza elastica è distribuita su tutta la base del corpo e non passa per un punto. Un corpo è a riposo in equilibrio quando una linea verticale tracciata attraverso il baricentro interseca l'area di appoggio. Diversamente, se la linea dal baricentro non cade nel contorno formato dalle linee che collegano i punti di appoggio, il corpo si ribalta.
Un esempio dell'equilibrio di un corpo su un supporto è la famosa Torre Pendente di Pisa. Secondo la leggenda, Galileo Galilei ne lasciò cadere le palle quando condusse i suoi esperimenti di studio caduta libera tel.

Una linea tracciata dal baricentro della torre interseca la base a circa 2,3 m dal suo centro.
Se noti un errore nel testo, evidenzialo e premi Ctrl+Invio
Classe: 10
Presentazione per la lezione






























 Indietro avanti
Indietro avanti
Attenzione! L'anteprima della diapositiva è solo a scopo informativo e potrebbe non rappresentare l'intera portata della presentazione. Se sei interessato a questo lavoro, scarica la versione completa.
Obiettivi della lezione: Studiare lo stato di equilibrio dei corpi, conoscere vari tipi di equilibrio; scoprire le condizioni in cui il corpo è in equilibrio.
Obiettivi della lezione:
- Formazione: Studiare due condizioni di equilibrio, tipi di equilibrio (stabile, instabile, indifferente). Scopri in quali condizioni i corpi sono più stabili.
- Sviluppando: Promuovere lo sviluppo dell'interesse cognitivo per la fisica. Sviluppo di abilità per confrontare, generalizzare, evidenziare la cosa principale, trarre conclusioni.
- Educativo: Coltivare l'attenzione, la capacità di esprimere il proprio punto di vista e difenderlo, sviluppare le capacità comunicative degli studenti.
Tipo di lezione: lezione imparando nuovo materiale con il supporto del computer.
Attrezzatura:
- Disco "Lavoro e potenza" da "Lezioni e prove di elettronica.
- Tabella "Condizioni di equilibrio".
- Prisma inclinato con un filo a piombo.
- Corpi geometrici: cilindro, cubo, cono, ecc.
- Computer, proiettore multimediale, lavagna interattiva o schermo.
- Presentazione.
Durante le lezioni
Oggi nella lezione impareremo perché la gru non cade, perché il giocattolo Roly-Vstanka torna sempre allo stato originale, perché la Torre Pendente di Pisa non cade?
I. Ripetizione e aggiornamento delle conoscenze.
- Formulare la prima legge di Newton. Qual è lo stato della legge?
- A quale domanda risponde la seconda legge di Newton? Formula e formulazione.
- A quale domanda risponde la terza legge di Newton? Formula e formulazione.
- Qual è la forza risultante? Com'è lei?
- Dal disco "Movimento e interazione dei corpi" completare l'attività n. 9 "La risultante di forze con direzioni diverse" (la regola dell'addizione vettoriale (2, 3 esercizi)).
II. Imparare nuovo materiale.
1. Cosa si chiama equilibrio?
L'equilibrio è uno stato di riposo.
2. Condizioni di equilibrio.(diapositiva 2)
a) Quando il corpo è a riposo? Da quale legge deriva?
La prima condizione di equilibrio: Un corpo è in equilibrio se la somma geometrica delle forze esterne applicate al corpo è zero. ∑ F = 0
b) Che due forze uguali agiscano sulla tavola, come mostrato in figura.

Sarà in equilibrio? (No, si girerà)
A riposo è solo punto centrale e il resto si sta muovendo. Ciò significa che affinché il corpo sia in equilibrio, è necessario che la somma di tutte le forze agenti su ciascun elemento sia uguale a 0.
La seconda condizione di equilibrio: La somma dei momenti delle forze che agiscono in senso orario deve essere uguale alla somma dei momenti delle forze che agiscono in senso antiorario.
∑ M in senso orario = ∑ M in senso antiorario
Momento di forza: M = F L
L - spalla della forza - la distanza più breve dal fulcro alla linea d'azione della forza.
3. Il baricentro del corpo e la sua posizione.(diapositiva 4)
Centro di gravità del corpo- questo è il punto attraverso il quale passa la risultante di tutte le forze di gravità parallele che agiscono sui singoli elementi del corpo (in qualsiasi posizione del corpo nello spazio).
Trova il baricentro delle seguenti figure:

4. Tipi di equilibrio.
ma) (diapositive 5-8)


Produzione: L'equilibrio è stabile se, con una piccola deviazione dalla posizione di equilibrio, c'è una forza che tende a riportarlo in tale posizione.
La posizione in cui la sua energia potenziale è minima è stabile. (diapositiva 9)
b) La stabilità dei corpi posti sul fulcro o sul fulcro.(diapositive 10-17)

Produzione: Per la stabilità di un corpo posizionato su un punto o linea di appoggio, è necessario che il baricentro sia al di sotto del punto (linea) di appoggio.
c) La stabilità dei corpi su una superficie piana.
(diapositiva 18)
1) Superficie di appoggio- questa non è sempre una superficie a contatto con il corpo (ma delimitata da linee che collegano le gambe del tavolo, treppiede)

2) Analisi di una diapositiva tratta da "Lezioni e prove elettroniche", disco "Lavoro e potenza", lezione "Tipi di equilibrio".
Immagine 1.
- In che modo le feci sono diverse? (Piedi quadrati)
- Quale è più stabile? (con area più ampia)
- In che modo le feci sono diverse? (Posizione del baricentro)
- Qual è il più stabile? (quale baricentro è più basso)
- Come mai? (Perché può essere deviato ad un angolo maggiore senza ribaltarsi)
3) Esperienza con un prisma deviante
- Mettiamo un prisma con un filo a piombo sul tabellone e iniziamo a sollevarlo gradualmente su un bordo. Cosa vediamo?
- Finché il filo a piombo attraversa la superficie delimitata dal supporto, l'equilibrio viene mantenuto. Ma non appena la verticale passante per il baricentro inizia a oltrepassare i confini del piano di appoggio, la libreria si ribalta.
Analisi diapositive 19–22.

Conclusioni:
- Il corpo con la più ampia area di appoggio è stabile.
- Di due corpi della stessa area, il corpo il cui baricentro è più basso è stabile, perché può essere deviato senza ribaltarsi con un grande angolo.
Analisi diapositive 23–25.

Quali navi sono le più stabili? Come mai? (Per cui il carico si trova nelle stive e non sul ponte)

Quali auto sono le più stabili? Come mai? (Per aumentare la stabilità delle auto in curva, il fondo stradale è inclinato nella direzione della svolta.)
Conclusioni: L'equilibrio può essere stabile, instabile, indifferente. La stabilità dei corpi è maggiore, maggiore è l'area di appoggio e minore è il baricentro.
III. Applicazione delle conoscenze sulla stabilità dei corpi.
- Quali specialità hanno più bisogno di conoscenze sull'equilibrio dei corpi?
- Progettisti e progettisti di varie strutture ( grattacieli, ponti, torri TV, ecc.)
- Artisti del circo.
- Autisti e altri professionisti.
(diapositive 28–30)
- Perché Roly-Vstanka torna alla posizione di equilibrio a qualsiasi inclinazione del giocattolo?
- Perché la Torre Pendente di Pisa è inclinata e non cade?
- In che modo ciclisti e motociclisti mantengono l'equilibrio?
Takeaway della lezione:
- Esistono tre tipi di equilibrio: stabile, instabile, indifferente.
- La posizione del corpo è stabile, in cui la sua energia potenziale è minima.
- La stabilità dei corpi su una superficie piana è maggiore, maggiore è l'area di appoggio e minore è il baricentro.
Compiti a casa: § 54 – 56 (Gya Myakishev, BB Bukhovtsev, NN Sotsky)
Fonti e letteratura utilizzate:
- G.Ya. Myakishev, BB Bukhovtsev, NN Sotsky. Fisica. Grado 10.
- Filmstrip "Stability" 1976 (scansionato da me su uno scanner per pellicole).
- Disco "Movimento e interazione dei corpi" da "Lezioni e prove elettroniche".
- Disco "Lavoro e potenza" da "Lezioni e prove di elettronica".
- In contatto con 0
- Google Plus 0
- ok 0
- Facebook 0