In altre parole, la dipendenza lineare di un gruppo di vettori significa che tra essi esiste un vettore che può essere rappresentato da una combinazione lineare di altri vettori di questo gruppo.
Diciamo. Poi
Quindi il vettore X linearmente dipendente dai vettori di questo gruppo.
Vettori X, sì, ..., z sono detti lineari vettori indipendenti, se dall'uguaglianza (0) segue che
α=β= ...= γ=0.
Cioè, i gruppi di vettori sono linearmente indipendenti se nessun vettore può essere rappresentato da una combinazione lineare di altri vettori in questo gruppo.
Determinazione della dipendenza lineare dei vettori
Siano dati m vettori stringa di ordine n:
Avendo fatto un'eccezione gaussiana, riduciamo la matrice (2) alla forma triangolare superiore. Gli elementi dell'ultima colonna cambiano solo quando le righe vengono riorganizzate. Dopo m passaggi di eliminazione otteniamo:

Dove io 1 , io 2 , ..., io m - indici di riga ottenuti per possibile permutazione di righe. Considerando le righe risultanti dagli indici di riga, escludiamo quelle che corrispondono al vettore riga zero. Le restanti linee formano vettori linearmente indipendenti. Si noti che quando si compone la matrice (2), modificando la sequenza dei vettori riga, è possibile ottenere un altro gruppo in modo lineare Non vettori dipendenti. Ma il sottospazio formato da entrambi questi gruppi di vettori coincide.
Dipendenza lineare e indipendenza lineare dei vettori.
Base dei vettori. Sistema di coordinate affini
C'è un carretto con cioccolatini nell'auditorium e ogni visitatore oggi riceverà una dolce coppia: geometria analitica con algebra lineare. Questo articolo toccherà due sezioni della matematica superiore contemporaneamente e vedremo come coesistono in un unico involucro. Prenditi una pausa, mangia un Twix! ...cavolo, che sciocchezze. Anche se, okay, non segnerò, alla fine dovresti avere un atteggiamento positivo nei confronti dello studio.
Dipendenza lineare dei vettori, indipendenza dal vettore lineare, base di vettori e altri termini non hanno solo un'interpretazione geometrica, ma soprattutto un significato algebrico. Il concetto stesso di “vettore” dal punto di vista dell'algebra lineare non è sempre il vettore “ordinario” che possiamo rappresentare su un piano o nello spazio. Non è necessario cercare lontano le prove, prova a disegnare un vettore dello spazio a cinque dimensioni ![]() . Oppure il vettore meteorologico, per il quale sono appena andato su Gismeteo: rispettivamente temperatura e pressione atmosferica. Naturalmente l'esempio non è corretto dal punto di vista delle proprietà spazio vettoriale, ma nessuno vieta tuttavia di formalizzare questi parametri come vettore. Respiro d'autunno...
. Oppure il vettore meteorologico, per il quale sono appena andato su Gismeteo: rispettivamente temperatura e pressione atmosferica. Naturalmente l'esempio non è corretto dal punto di vista delle proprietà spazio vettoriale, ma nessuno vieta tuttavia di formalizzare questi parametri come vettore. Respiro d'autunno...
No, non ti annoierò con la teoria, spazi vettoriali lineari, il compito è quello capire definizioni e teoremi. I nuovi termini (dipendenza lineare, indipendenza, combinazione lineare, base, ecc.) si applicano a tutti i vettori da un punto di vista algebrico, ma verranno forniti esempi geometrici. Quindi tutto è semplice, accessibile e chiaro. Oltre ai problemi di geometria analitica, ne prenderemo in considerazione anche alcuni compiti tipici algebra Per padroneggiare il materiale, è consigliabile familiarizzare con le lezioni Vettori per manichini E Come calcolare il determinante?
Dipendenza e indipendenza lineare dei vettori piani.
Base piana e sistema di coordinate affini
Consideriamo il piano della scrivania del tuo computer (solo un tavolo, un comodino, il pavimento, il soffitto, qualunque cosa tu voglia). L'attività consisterà nelle seguenti azioni:
1) Seleziona la base dell'aereo. In parole povere, il piano di un tavolo ha una lunghezza e una larghezza, quindi è intuitivo che saranno necessari due vettori per costruire la base. Un vettore chiaramente non è sufficiente, tre vettori sono troppi.
2) In base alla base selezionata impostare il sistema di coordinate(griglia di coordinate) per assegnare le coordinate a tutti gli oggetti sul tavolo.
Non sorprenderti, all'inizio le spiegazioni saranno sulle dita. Inoltre, sul tuo. Per favore, posizionalo indice sinistro sul bordo del tavolo in modo da poter guardare il monitor. Questo sarà un vettore. Adesso posto mignolo destra
sul bordo del tavolo allo stesso modo, in modo che sia rivolto verso lo schermo del monitor. Questo sarà un vettore. Sorridi, stai benissimo! Cosa possiamo dire dei vettori? Vettori di dati collineare, il che significa lineare espressi l'uno attraverso l'altro:
, beh, o viceversa: , dove è un numero diverso da zero.
Puoi vedere un'immagine di questa azione in classe. Vettori per manichini, dove ho spiegato la regola per moltiplicare un vettore per un numero.
Le tue dita poseranno la base sul piano della scrivania del computer? Ovviamente no. I vettori collineari viaggiano avanti e indietro solo direzione e un piano ha lunghezza e larghezza.
Tali vettori sono chiamati linearmente dipendente.
Riferimento: Le parole "lineare", "linearmente" denotano il fatto che nelle equazioni ed espressioni matematiche non ci sono quadrati, cubi, altre potenze, logaritmi, seni, ecc. Esistono solo espressioni e dipendenze lineari (1° grado).
Due vettori piani linearmente dipendente se e solo se sono collineari.
Incrocia le dita sul tavolo in modo che tra loro vi sia un angolo diverso da 0 o 180 gradi. Due vettori pianilineare Non dipendenti se e solo se non sono collineari. Quindi, la base è ottenuta. Non c'è bisogno di vergognarsi del fatto che la base si sia rivelata "distorta" con vettori non perpendicolari di diversa lunghezza. Molto presto vedremo che non solo un angolo di 90 gradi è adatto alla sua costruzione, e non solo vettori unitari di uguale lunghezza
Qualunque vettore aereo l'unico modo viene ampliato secondo la base: ![]() , dove sono i numeri reali. I numeri vengono chiamati coordinate vettoriali su questa base.
, dove sono i numeri reali. I numeri vengono chiamati coordinate vettoriali su questa base.
Si dice anche così vettorepresentato come combinazione lineare vettori di base. Cioè, l'espressione si chiama decomposizione vettorialeper base O combinazione lineare vettori di base.
Ad esempio possiamo dire che il vettore è scomposto lungo una base ortonormale del piano, oppure possiamo dire che è rappresentato come una combinazione lineare di vettori.
Formuliamo definizione di base formalmente: La base dell'aereoè chiamata una coppia di vettori linearmente indipendenti (non collineari), , Mentre Qualunque un vettore piano è una combinazione lineare di vettori base.
Un punto essenziale della definizione è il fatto che vengono presi i vettori in un certo ordine. Basi ![]() – queste sono due basi completamente diverse! Come si suol dire, non puoi sostituire il mignolo della mano sinistra al posto del mignolo della mano destra.
– queste sono due basi completamente diverse! Come si suol dire, non puoi sostituire il mignolo della mano sinistra al posto del mignolo della mano destra.
Abbiamo individuato le basi, ma non è sufficiente impostare una griglia di coordinate e assegnare le coordinate a ciascun oggetto sulla scrivania del computer. Perché non è abbastanza? I vettori sono liberi e vagano per tutto il piano. Allora come si assegnano le coordinate a quei piccoli punti sporchi sul tavolo rimasti da un fine settimana selvaggio? Serve un punto di partenza. E un punto di riferimento del genere è un punto familiare a tutti: l'origine delle coordinate. Comprendiamo il sistema di coordinate:
Inizierò con il sistema “scuola”. Già nella lezione introduttiva Vettori per manichini Ho evidenziato alcune differenze tra il sistema di coordinate rettangolari e la base ortonormale. Ecco l'immagine standard:

Quando ne parlano sistema di coordinate rettangolari, quindi molto spesso significano l'origine delle coordinate, assi coordinati e scalare lungo gli assi. Prova a digitare "sistema di coordinate rettangolari" in un motore di ricerca e vedrai che molte fonti ti parleranno degli assi di coordinate familiari dalla 5a alla 6a elementare e come tracciare i punti su un piano.
D'altra parte, sembra di sì sistema rettangolare le coordinate possono essere completamente determinate attraverso una base ortonormale. E questo è quasi vero. La dicitura è la seguente:
origine, E ortonormale la base è fissata Sistema di coordinate del piano cartesiano rettangolare . Cioè, il sistema di coordinate rettangolari decisamenteè definito da un singolo punto e due vettori unitari ortogonali. Ecco perché vedi il disegno che ho fornito sopra: nei problemi geometrici, sia i vettori che gli assi delle coordinate vengono spesso (ma non sempre) disegnati.
Penso che tutti lo capiscano usando un punto (origine) e una base ortonormale QUALSIASI PUNTO sull'aereo e QUALSIASI VETTORE sull'aereoè possibile assegnare le coordinate. In senso figurato, “tutto su un aereo può essere numerato”.
I vettori di coordinate devono essere unità? No, possono avere una lunghezza arbitraria diversa da zero. Consideriamo un punto e due vettori ortogonali di lunghezza arbitraria diversa da zero:

Tale base è chiamata ortogonale. L'origine delle coordinate con i vettori è definita da una griglia di coordinate e qualsiasi punto del piano, qualsiasi vettore ha le sue coordinate in una data base. Ad esempio, o. L'ovvio inconveniente è che i vettori delle coordinate nel caso generale hanno lunghezze diverse diverse dall'unità. Se le lunghezze sono uguali all'unità, si ottiene la consueta base ortonormale.
! Nota : nella base ortogonale, così come di seguito nelle basi affini del piano e dello spazio, si considerano le unità lungo gli assi CONDIZIONALE. Ad esempio, un'unità lungo l'asse x contiene 4 cm, un'unità lungo l'asse delle ordinate contiene 2 cm. Questa informazione è sufficiente per convertire, se necessario, le coordinate “non standard” nei “nostri soliti centimetri”.
E la seconda domanda, alla quale in realtà è già stata data risposta, è se l'angolo tra i vettori base deve essere uguale a 90 gradi? NO! Come afferma la definizione, i vettori base devono essere solo non collineare. Di conseguenza, l'angolo può essere qualsiasi cosa tranne 0 e 180 gradi.
Un punto sull'aereo chiamato origine, E non collineare vettori, , impostato sistema di coordinate del piano affine :

A volte viene chiamato un tale sistema di coordinate obliquo sistema. Ad esempio, il disegno mostra punti e vettori: 
Come hai capito, il sistema di coordinate affini è ancora meno conveniente, le formule per le lunghezze di vettori e segmenti, di cui abbiamo discusso nella seconda parte della lezione, non funzionano; Vettori per manichini, tante deliziose formule legate a prodotto scalare di vettori. Ma sono valide le regole per aggiungere vettori e moltiplicare un vettore per un numero, le formule per dividere un segmento in questa relazione, così come alcuni altri tipi di problemi che considereremo presto.
E la conclusione è che il caso speciale più conveniente sistema affine coordinate è un sistema rettangolare cartesiano. Ecco perché devi vederla molto spesso, mia cara. ...Tuttavia, tutto in questa vita è relativo: ci sono molte situazioni in cui un angolo obliquo (o qualche altro, ad esempio, polare) sistema di coordinate. E agli umanoidi potrebbero piacere tali sistemi =)
Passiamo alla parte pratica. Tutti i problemi di questa lezione sono validi sia per il sistema di coordinate rettangolari che per il caso affine generale. Non c'è niente di complicato qui, tutto il materiale è accessibile anche a uno scolaro.
Come determinare la collinearità dei vettori piani?
Cosa tipica. In ordine per due vettori piani ![]() fossero collineari, è necessario e sufficiente che le loro coordinate corrispondenti siano proporzionali Essenzialmente, questo è un dettaglio, coordinata per coordinata, della relazione ovvia.
fossero collineari, è necessario e sufficiente che le loro coordinate corrispondenti siano proporzionali Essenzialmente, questo è un dettaglio, coordinata per coordinata, della relazione ovvia.
Esempio 1
a) Controlla se i vettori sono collineari ![]() .
.
b) I vettori formano una base? ![]() ?
?
Soluzione:
a) Scopriamo se esiste per i vettori ![]() coefficiente di proporzionalità, tale che le uguaglianze siano soddisfatte:
coefficiente di proporzionalità, tale che le uguaglianze siano soddisfatte: ![]()
Ti parlerò sicuramente del tipo di applicazione "stupida". di questa regola, che funziona abbastanza bene nella pratica. L'idea è di fare subito la proporzione e vedere se è corretta:
Facciamo una proporzione dai rapporti delle coordinate corrispondenti dei vettori:
Accorciamo:
, quindi le coordinate corrispondenti sono proporzionali, quindi,
La relazione potrebbe essere fatta al contrario; questa è un'opzione equivalente:
Per l'autotest, è possibile utilizzare il fatto che i vettori collineari sono espressi linearmente l'uno attraverso l'altro. In questo caso si realizzano le uguaglianze ![]() . La loro validità può essere facilmente verificata attraverso operazioni elementari con i vettori:
. La loro validità può essere facilmente verificata attraverso operazioni elementari con i vettori: 
b) Due vettori piani formano una base se non sono collineari (linearmente indipendenti). Esaminiamo i vettori per la collinearità ![]() . Creiamo un sistema:
. Creiamo un sistema: 
Dalla prima equazione segue che , dalla seconda equazione segue che , che significa il sistema è incoerente(nessuna soluzione). Pertanto, le coordinate corrispondenti dei vettori non sono proporzionali.
Conclusione: i vettori sono linearmente indipendenti e formano una base.
Una versione semplificata della soluzione è simile alla seguente:
Facciamo una proporzione dalle coordinate corrispondenti dei vettori ![]() :
:
, il che significa che questi vettori sono linearmente indipendenti e formano una base.
In genere, questa opzione non viene rifiutata dai revisori, ma sorge un problema nei casi in cui alcune coordinate sono uguali a zero. In questo modo: ![]() . O così:
. O così: ![]() . O così:
. O così: ![]() . Come lavorare attraverso la proporzione qui? (in effetti, non puoi dividere per zero). È per questo motivo che ho definito “stupida” la soluzione semplificata.
. Come lavorare attraverso la proporzione qui? (in effetti, non puoi dividere per zero). È per questo motivo che ho definito “stupida” la soluzione semplificata.
Risposta: a) , b) forma.
Un piccolo esempio creativo per la tua soluzione:
Esempio 2
A quale valore del parametro sono i vettori ![]() saranno collineari?
saranno collineari?
Nella soluzione campione il parametro si trova attraverso la proporzione.
Esiste un modo algebrico elegante per verificare la collinearità dei vettori. Sistematizziamo le nostre conoscenze e aggiungiamole come quinto punto:
Per due vettori piani le seguenti affermazioni sono equivalenti:
2) i vettori formano una base;
3) i vettori non sono collineari;
+ 5) il determinante composto dalle coordinate di questi vettori è diverso da zero.
Rispettivamente, le seguenti affermazioni opposte sono equivalenti:
1) i vettori sono linearmente dipendenti;
2) i vettori non costituiscono una base;
3) i vettori sono collineari;
4) i vettori possono essere espressi linearmente l'uno attraverso l'altro;
+ 5) il determinante composto dalle coordinate di questi vettori è uguale a zero.
Lo spero davvero, davvero al momento capisci già tutti i termini e le affermazioni che incontri.
Vediamo più da vicino il nuovo, quinto punto: due vettori piani ![]() sono collineari se e solo se il determinante composto dalle coordinate dei vettori dati è uguale a zero:. Per l'uso di questa caratteristica Naturalmente, devi essere in grado di farlo trovare determinanti.
sono collineari se e solo se il determinante composto dalle coordinate dei vettori dati è uguale a zero:. Per l'uso di questa caratteristica Naturalmente, devi essere in grado di farlo trovare determinanti.
Decidiamo Esempio 1 nel secondo modo:
a) Calcoliamo il determinante formato dalle coordinate dei vettori ![]() :
:![]() , il che significa che questi vettori sono collineari.
, il che significa che questi vettori sono collineari.
b) Due vettori piani formano una base se non sono collineari (linearmente indipendenti). Calcoliamo il determinante formato dalle coordinate vettoriali ![]() :
:![]() , il che significa che i vettori sono linearmente indipendenti e formano una base.
, il che significa che i vettori sono linearmente indipendenti e formano una base.
Risposta: a) , b) forma.
Sembra molto più compatto e più carino di una soluzione con proporzioni.
Con l'aiuto del materiale considerato è possibile stabilire non solo la collinearità dei vettori, ma anche dimostrare il parallelismo dei segmenti e delle rette. Consideriamo un paio di problemi con forme geometriche specifiche.
Esempio 3
Sono dati i vertici di un quadrilatero. Dimostrare che un quadrilatero è un parallelogramma.
Prova: Non è necessario costruire un disegno del problema, poiché la soluzione sarà puramente analitica. Ricordiamo la definizione di parallelogramma:
Parallelogramma
Si chiama quadrilatero i cui lati opposti sono paralleli a coppie.
Occorre quindi dimostrare:
1) parallelismo dei lati opposti e;
2) parallelismo dei lati opposti e.
Dimostriamo:
1) Trova i vettori: 
![]()
2) Trova i vettori: 
Il risultato è lo stesso vettore (“secondo la scuola” – vettori uguali). La collinearità è abbastanza evidente, ma è meglio formalizzare la decisione in modo chiaro, con accordo. Calcoliamo il determinante formato dalle coordinate vettoriali: ![]() , il che significa che questi vettori sono collineari e .
, il che significa che questi vettori sono collineari e .
Conclusione: I lati opposti di un quadrilatero sono paralleli a coppie, il che significa che è un parallelogramma per definizione. Q.E.D.
Figure più buone e diverse:
Esempio 4
Sono dati i vertici di un quadrilatero. Dimostrare che un quadrilatero è un trapezio.
Per una formulazione più rigorosa della dimostrazione, ovviamente, è meglio ottenere la definizione di trapezio, ma è sufficiente ricordare semplicemente come appare.
Questo è un compito che devi risolvere da solo. Soluzione completa alla fine della lezione.
E ora è il momento di spostarsi lentamente dall’aereo allo spazio:
Come determinare la collinearità dei vettori spaziali?
La regola è molto simile. Affinché due vettori spaziali siano collineari è necessario e sufficiente che le loro coordinate corrispondenti siano proporzionali.
Esempio 5
Scopri se i seguenti vettori spaziali sono collineari:
UN) ;
B)
V) ![]()
Soluzione:
a) Controlliamo se esiste un coefficiente di proporzionalità per le corrispondenti coordinate dei vettori:
Il sistema non ha soluzione, il che significa che i vettori non sono collineari.
Il “semplificato” viene formalizzato verificando la proporzione. In questo caso:
– le coordinate corrispondenti non sono proporzionali, cioè i vettori non sono collineari.
Risposta: i vettori non sono collineari.
b-c) Questi sono punti per una decisione indipendente. Provalo in due modi.
Esiste un metodo per verificare la collinearità dei vettori spaziali tramite un determinante del terzo ordine, questo metodo è trattato nell'articolo Prodotto vettoriale di vettori.
Analogamente al caso del piano, gli strumenti considerati possono essere utilizzati per studiare il parallelismo di segmenti spaziali e linee rette.
Benvenuti nella seconda sezione:
Dipendenza e indipendenza lineare dei vettori nello spazio tridimensionale.
Base spaziale e sistema di coordinate affini
Molti dei modelli che abbiamo esaminato sull’aereo saranno validi anche per lo spazio. Ho cercato di ridurre al minimo gli appunti teorici, visto che la parte del leone delle informazioni è già stata masticata. Consiglio comunque di leggerlo con attenzione parte introduttiva, man mano che appariranno nuovi termini e concetti.
Ora, invece del piano della scrivania del computer, esploriamo lo spazio tridimensionale. Per prima cosa, creiamo le sue basi. Qualcuno ora è in casa, qualcuno è fuori, ma in ogni caso non possiamo sfuggire alle tre dimensioni: larghezza, lunghezza e altezza. Pertanto, per costruire una base saranno necessari tre vettori spaziali. Uno o due vettori non bastano, il quarto è superfluo.
E ancora ci riscaldiamo sulle dita. Per favore alza la mano e allargala in diverse direzioni pollice, indice e medio. Questi saranno vettori, guardano in direzioni diverse, hanno lunghezze diverse e hanno angoli diversi tra loro. Congratulazioni, la base dello spazio tridimensionale è pronta! A proposito, non è necessario dimostrarlo agli insegnanti, non importa quanto forte giri le dita, ma non si può sfuggire alle definizioni =)
Poniamoci poi una domanda importante: tre vettori qualsiasi formano una base dello spazio tridimensionale? Premere saldamente tre dita sulla parte superiore della scrivania del computer. Quello che è successo? Tre vettori si trovano sullo stesso piano e, grosso modo, abbiamo perso una delle dimensioni: l'altezza. Tali vettori sono complanare ed è abbastanza ovvio che la base dello spazio tridimensionale non è stata creata.
Va notato che i vettori complanari non devono necessariamente giacere sullo stesso piano, possono essere su piani paralleli (basta non farlo con le dita, solo Salvador Dalì lo ha fatto =)).
Definizione: vengono chiamati i vettori complanare, se esiste un piano al quale sono paralleli. È logico aggiungere qui che se tale piano non esiste, i vettori non saranno complanari.
Tre vettori complanari sono sempre linearmente dipendenti, cioè sono espressi linearmente l'uno attraverso l'altro. Per semplicità, immaginiamo ancora una volta che si trovino sullo stesso piano. Innanzitutto i vettori non solo sono complanari, ma possono anche essere collineari, quindi qualsiasi vettore può essere espresso tramite qualsiasi vettore. Nel secondo caso, se ad esempio i vettori non sono collineari, allora il terzo vettore si esprime attraverso di essi in modo unico: ![]() (e perché è facile intuirlo dai materiali della sezione precedente).
(e perché è facile intuirlo dai materiali della sezione precedente).
È vero anche il contrario: tre vettori non complanari sono sempre linearmente indipendenti, cioè, non si esprimono in alcun modo l'uno attraverso l'altro. E, ovviamente, solo tali vettori possono costituire la base dello spazio tridimensionale.
Definizione: La base dello spazio tridimensionaleè chiamata tripla di vettori linearmente indipendenti (non complanari), presi in un certo ordine e qualsiasi vettore dello spazio l'unico modo viene scomposto su una data base, dove sono le coordinate del vettore in questa base
Ti ricordo che possiamo anche dire che il vettore è rappresentato nella forma combinazione lineare vettori di base.
Il concetto di sistema di coordinate viene introdotto esattamente come nel caso del piano e sono sufficienti tre vettori linearmente indipendenti qualsiasi:
origine, E non complanare vettori, presi in un certo ordine, impostato sistema di coordinate affini dello spazio tridimensionale
:
Naturalmente, la griglia di coordinate è “obliqua” e scomoda, ma, tuttavia, il sistema di coordinate costruito ce lo consente decisamente determinare le coordinate di qualsiasi vettore e le coordinate di qualsiasi punto nello spazio. Similmente ad un piano, alcune formule che ho già menzionato non funzioneranno nel sistema di coordinate affini dello spazio.
Il caso speciale più familiare e conveniente di un sistema di coordinate affine, come tutti immaginano, è sistema di coordinate spaziali rettangolari:
Un punto nello spazio chiamato origine, E ortonormale la base è fissata Sistema di coordinate spaziali cartesiane rettangolari
. Immagine familiare: 
Prima di passare ai compiti pratici, sistemizziamo nuovamente le informazioni:
Per tre vettori spaziali le seguenti affermazioni sono equivalenti:
1) i vettori sono linearmente indipendenti;
2) i vettori formano una base;
3) i vettori non sono complanari;
4) i vettori non possono essere espressi linearmente l'uno attraverso l'altro;
5) il determinante, composto dalle coordinate di questi vettori, è diverso da zero.
Penso che le affermazioni opposte siano comprensibili.
La dipendenza/indipendenza lineare dei vettori spaziali viene tradizionalmente verificata utilizzando un determinante (punto 5). I restanti compiti pratici saranno di natura chiaramente algebrica. È ora di appendere al chiodo il bastone della geometria e impugnare la mazza da baseball dell'algebra lineare:
Tre vettori dello spazio sono complanari se e solo se il determinante composto dalle coordinate dei vettori dati è uguale a zero:  .
.
Vorrei attirare la vostra attenzione su una piccola sfumatura tecnica: le coordinate dei vettori possono essere scritte non solo in colonne, ma anche in righe (il valore del determinante non cambierà da questo - vedi proprietà dei determinanti). Ma è molto meglio in colonne, poiché è più utile per risolvere alcuni problemi pratici.
Per quei lettori che hanno un po' dimenticato i metodi di calcolo dei determinanti, o forse li capiscono poco, consiglio una delle mie lezioni più antiche: Come calcolare il determinante?
Esempio 6
Controlla se i seguenti vettori costituiscono la base dello spazio tridimensionale:
Soluzione: In effetti, l'intera soluzione si riduce al calcolo del determinante.
a) Calcoliamo il determinante formato dalle coordinate dei vettori (il determinante si rivela nella prima riga): 
, il che significa che i vettori sono linearmente indipendenti (non complanari) e costituiscono la base dello spazio tridimensionale.
Risposta: questi vettori costituiscono una base
b) Questo è un punto per una decisione indipendente. Soluzione completa e risposta alla fine della lezione.
Ci sono anche compiti creativi:
Esempio 7
Per quale valore del parametro i vettori saranno complanari?
Soluzione: I vettori sono complanari se e solo se il determinante composto dalle coordinate di questi vettori è uguale a zero: 
In sostanza, devi risolvere un'equazione con un determinante. Piombiamo sugli zeri come gli aquiloni sui jerboa: è meglio aprire il determinante nella seconda riga e sbarazzarci immediatamente degli svantaggi: 
Effettuiamo ulteriori semplificazioni e riduciamo la questione al più semplice equazione lineare:![]()
Risposta: A
È facile controllare qui; per fare ciò, devi sostituire il valore risultante nel determinante originale e assicurartene  , riaprendolo.
, riaprendolo.
In conclusione, vediamone un altro compito tipico, che è di natura più algebrica ed è tradizionalmente incluso nel corso di algebra lineare. È così comune che merita un argomento a parte:
Dimostrare che 3 vettori costituiscono la base dello spazio tridimensionale
e trova in questa base le coordinate del 4° vettore
Esempio 8
Sono dati i vettori. Mostra che i vettori formano una base nello spazio tridimensionale e trova le coordinate del vettore in questa base.
Soluzione: Per prima cosa, affrontiamo la condizione. Per condizione, vengono forniti quattro vettori e, come puoi vedere, hanno già delle coordinate in qualche base. Quale sia questa base non ci interessa. Ed è interessante la cosa seguente: tre vettori potrebbero benissimo formare una nuova base. E la prima fase coincide completamente con la soluzione dell'Esempio 6: occorre verificare se i vettori sono veramente linearmente indipendenti:
Calcoliamo il determinante formato dalle coordinate vettoriali: 
, il che significa che i vettori sono linearmente indipendenti e costituiscono la base dello spazio tridimensionale.
! Importante : coordinate vettoriali Necessariamente scrivere in colonne determinante, non nelle stringhe. Altrimenti si creerà confusione nell'ulteriore algoritmo risolutivo.
Presentato da noi operazioni lineari sui vettori consentono di creare varie espressioni per quantità vettoriali e trasformarli utilizzando le proprietà impostate per queste operazioni.
Sulla base di un dato insieme di vettori a 1, ..., a n, puoi creare un'espressione della forma
dove a 1, ... e n sono numeri reali arbitrari. Questa espressione si chiama combinazione lineare di vettori un 1, ..., un n. I numeri α i, i = 1, n, rappresentano coefficienti di combinazione lineare. Viene anche chiamato un insieme di vettori sistema di vettori.
In relazione al concetto introdotto di combinazione lineare di vettori, si pone il problema di descrivere un insieme di vettori che può essere scritto come combinazione lineare di un dato sistema di vettori a 1, ..., a n. Inoltre, sorgono domande naturali sulle condizioni in cui esiste una rappresentazione di un vettore sotto forma di combinazione lineare e sull'unicità di tale rappresentazione.
Definizione 2.1. I vettori a 1, ... e n sono chiamati linearmente dipendente, se esiste un insieme di coefficienti α 1 , ... , α n tale che
α 1 a 1 + ... + α n а n = 0 (2.2)
e almeno uno di questi coefficienti è diverso da zero. Se l'insieme di coefficienti specificato non esiste, vengono chiamati i vettori linearmente indipendenti.
Se α 1 = ... = α n = 0, allora, ovviamente, α 1 a 1 + ... + α n a n = 0. Tenendo presente questo, possiamo dire questo: vettori a 1, ..., e n sono linearmente indipendenti se dall'uguaglianza (2.2) segue che tutti i coefficienti α 1 , ... , α n sono uguali a zero.
Il seguente teorema spiega perché il nuovo concetto è chiamato il termine "dipendenza" (o "indipendenza") e fornisce un semplice criterio per la dipendenza lineare.
Teorema 2.1. Affinché i vettori a 1, ..., en, n > 1, siano linearmente dipendenti, è necessario e sufficiente che uno di essi sia una combinazione lineare degli altri.
◄ Necessità. Supponiamo che i vettori a 1, ... e n siano linearmente dipendenti. Secondo la Definizione 2.1 di dipendenza lineare, nell'uguaglianza (2.2) a sinistra c'è almeno un coefficiente diverso da zero, ad esempio α 1. Lasciando il primo termine a sinistra dell'uguaglianza, spostiamo il resto a lato destro, cambiando segno, come al solito. Dividendo l'uguaglianza risultante per α 1, otteniamo
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
quelli. rappresentazione del vettore a 1 come combinazione lineare dei restanti vettori a 2, ..., a n.
Adeguatezza. Supponiamo, ad esempio, che il primo vettore a 1 possa essere rappresentato come una combinazione lineare dei restanti vettori: a 1 = β 2 a 2 + ... + β n a n. Trasferendo tutti i termini da destra a sinistra otteniamo a 1 - β 2 a 2 - ... - β n a n = 0, cioè una combinazione lineare di vettori a 1, ..., an con coefficienti α 1 = 1, α 2 = - β 2, ..., α n = - β n, pari a vettore nullo. In questa combinazione lineare, non tutti i coefficienti sono zero. Secondo la Definizione 2.1, i vettori a 1, ... e n sono linearmente dipendenti.
La definizione e il criterio per la dipendenza lineare sono formulati per implicare la presenza di due o più vettori. Tuttavia, possiamo anche parlare di una dipendenza lineare di un vettore. Per realizzare questa possibilità, invece di “i vettori sono linearmente dipendenti”, è necessario dire “il sistema di vettori è linearmente dipendente”. È facile vedere che l'espressione “un sistema di un vettore è linearmente dipendente” significa che questo singolo vettore è zero (in una combinazione lineare c'è solo un coefficiente e non dovrebbe essere uguale a zero).
Il concetto di dipendenza lineare ha una semplice interpretazione geometrica. Le tre affermazioni seguenti chiariscono questa interpretazione.
Teorema 2.2. Due vettori sono linearmente dipendenti se e solo se collineare.
◄ Se i vettori a e b sono linearmente dipendenti, allora uno di essi, ad esempio a, è espresso attraverso l'altro, cioè a = λb per un numero reale λ. Secondo la definizione 1.7 funziona vettori per numero, i vettori a e b sono collineari.
Siano ora i vettori a e b collineari. Se sono entrambi nulli, allora è ovvio che sono linearmente dipendenti, poiché qualsiasi loro combinazione lineare è uguale al vettore zero. Sia uno di questi vettori diverso da 0, ad esempio il vettore b. Indichiamo con λ il rapporto tra le lunghezze dei vettori: λ = |a|/|b|. I vettori collineari possono essere unidirezionale O diretto in senso opposto. In quest'ultimo caso cambiamo il segno di λ. Allora, verificando la Definizione 1.7, siamo convinti che a = λb. Secondo il Teorema 2.1, i vettori aeb sono linearmente dipendenti.
Osservazione 2.1. Nel caso di due vettori, tenendo conto del criterio della dipendenza lineare, il teorema dimostrato può essere riformulato così: due vettori sono collineari se e solo se uno di essi è rappresentato come il prodotto dell'altro da un numero. Questo è un criterio conveniente per la collinearità di due vettori.
Teorema 2.3. Tre vettori sono linearmente dipendenti se e solo se complanare.
◄ Se tre vettori a, b, c sono linearmente dipendenti, allora, secondo il Teorema 2.1, uno di essi, ad esempio a, è una combinazione lineare degli altri: a = βb + γc. Combiniamo le origini dei vettori b e c nel punto A. Allora i vettori βb, γс avranno un'origine comune nel punto A e lungo secondo la regola del parallelogramma, la loro somma è quelli. il vettore a sarà un vettore con origine A e la fine, che è il vertice di un parallelogramma costruito sui vettori componenti. Pertanto tutti i vettori giacciono sullo stesso piano, cioè complanari.
Siano complanari i vettori a, b, c. Se uno di questi vettori è zero, allora è ovvio che sarà una combinazione lineare degli altri. È sufficiente prendere tutti i coefficienti di una combinazione lineare uguali a zero. Pertanto, possiamo supporre che tutti e tre i vettori non siano zero. Compatibile iniziato di questi vettori in un punto comune O. Lascia che le loro estremità siano rispettivamente i punti A, B, C (Fig. 2.1). Per il punto C tracciamo rette parallele alle rette passanti per coppie di punti O, A e O, B. Designando i punti di intersezione come A" e B", otteniamo un parallelogramma OA"CB", quindi OC" = OA" + OB". Il vettore OA" e il vettore diverso da zero a = OA sono collineari, e quindi il primo di essi può essere ottenuto moltiplicando il secondo per un numero reale α:OA" = αOA. Allo stesso modo, OB" = βOB, β ∈ R. Di conseguenza, otteniamo che OC" = α OA. + βOB, cioè il vettore c è una combinazione lineare dei vettori a e b. Secondo il Teorema 2.1, i vettori a, b, c sono linearmente dipendenti.

Teorema 2.4. Quattro vettori qualsiasi sono linearmente dipendenti.
◄ Effettuiamo la dimostrazione secondo lo stesso schema del Teorema 2.3. Considera quattro vettori arbitrari a, b, c e d. Se uno dei quattro vettori è zero, o tra di essi ci sono due vettori collineari, oppure tre dei quattro vettori sono complanari, allora questi quattro vettori sono linearmente dipendenti. Ad esempio, se i vettori a e b sono collineari, allora possiamo creare la loro combinazione lineare αa + βb = 0 con coefficienti diversi da zero, quindi aggiungere i restanti due vettori a questa combinazione, prendendo zero come coefficienti. Otteniamo una combinazione lineare di quattro vettori uguali a 0, in cui sono presenti coefficienti diversi da zero.
Pertanto, possiamo assumere che tra i quattro vettori selezionati, nessun vettore è zero, nessuno due è collineare e nessuno tre è complanare. Scegliamo il punto O come inizio comune. Quindi le estremità dei vettori a, b, c, d saranno alcuni punti A, B, C, D (Fig. 2.2). Per il punto D tracciamo tre piani paralleli ai piani OBC, OCA, OAB, e siano A", B", C" i punti di intersezione di questi piani rispettivamente con le rette OA, OB, OS. Otteniamo un parallelepipedo OA" C "B" C" B"DA", e i vettori a, b, c giacciono sui suoi bordi emergenti dal vertice O. Poiché il quadrilatero OC"DC" è un parallelogramma, allora OD = OC" + OC" A sua volta, il segmento OC" è un parallelogramma diagonale OA"C"B", quindi OC" = OA" + OB" e OD = OA" + OB" + OC" .
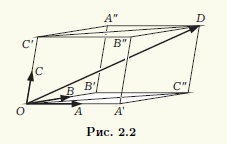
Resta da notare che le coppie di vettori OA ≠ 0 e OA" , OB ≠ 0 e OB" , OC ≠ 0 e OC" sono collineari, e quindi è possibile selezionare i coefficienti α, β, γ in modo che OA" = αOA, OB" = βOB e OC" = γOC. Alla fine otteniamo OD = αOA + βOB + γOC. Di conseguenza, il vettore OD è espresso attraverso gli altri tre vettori, e tutti e quattro i vettori, secondo il Teorema 2.1, sono linearmente dipendenti.
In questo articolo tratteremo:
- cosa sono i vettori collineari;
- quali sono le condizioni per la collinearità dei vettori;
- quali proprietà esistono dei vettori collineari;
- qual è la dipendenza lineare dei vettori collineari.
I vettori collineari sono vettori paralleli a una linea o che giacciono su una linea.
Esempio 1
Condizioni di collinearità dei vettori
Due vettori sono collineari se è vera una delle seguenti condizioni:
- condizione 1 . I vettori aeb sono collineari se esiste un numero λ tale che a = λ b;
- condizione 2 . I vettori a e b sono collineari con rapporti di coordinate uguali:
a = (a 1 ; a 2) , b = (b 1 ; b 2) ⇒ a ∥ b ⇔ a 1 b 1 = a 2 b 2
- condizione 3 . I vettori a e b sono collineari a condizione che il prodotto vettoriale e il vettore zero siano uguali:
un ∥ b ⇔ un, b = 0
Nota 1
Condizione 2 non applicabile se una delle coordinate del vettore è zero.
Nota 2
Condizione 3 si applica solo a quei vettori specificati nello spazio.
Esempi di problemi per studiare la collinearità dei vettori
Esempio 1Esaminiamo i vettori a = (1; 3) e b = (2; 1) per la collinearità.
Come risolvere?
In questo caso è necessario utilizzare la 2a condizione di collinearità. Per dati vettori assomiglia a questo:
L'uguaglianza è falsa. Da ciò possiamo concludere che i vettori a e b non sono collineari.
Risposta : un | | B
Esempio 2
Quale valore m del vettore a = (1; 2) eb = (- 1; m) è necessario affinché i vettori siano collineari?
Come risolvere?
Utilizzando la seconda condizione di collinearità, i vettori saranno collineari se le loro coordinate sono proporzionali:
Ciò dimostra che m = - 2.
Risposta: m = - 2 .
Criteri di dipendenza lineare e indipendenza lineare di sistemi vettoriali
TeoremaUn sistema di vettori in uno spazio vettoriale è linearmente dipendente solo se uno dei vettori del sistema può essere espresso in termini dei rimanenti vettori di questo sistema.
Prova
Sia il sistema e 1 , e 2 , . . . , e n è linearmente dipendente. Scriviamo una combinazione lineare di questo sistema uguale al vettore zero:
un 1 e 1 + un 2 e 2 + . . . + a n e n = 0
in cui almeno uno dei coefficienti di combinazione non è uguale a zero.
Sia a k ≠ 0 k ∈ 1 , 2 , . . . , N.
Dividiamo entrambi i membri dell'uguaglianza per un coefficiente diverso da zero:
a k - 1 (ak - 1 a 1) e 1 + (ak - 1 a k) e k + . . . + (a k - 1 a n) e n = 0
Indichiamo:
A k - 1 am , dove m ∈ 1 , 2 , . . . , k - 1 , k + 1 , n
In questo caso:
β 1 e 1 + . . . + β k - 1 e k - 1 + β k + 1 e k + 1 + . . . + β n e n = 0
oppure e k = (- β 1) e 1 + . . . + (- β k - 1) e k - 1 + (- β k + 1) e k + 1 + . . . + (- β n) e n
Ne consegue che uno dei vettori del sistema si esprime attraverso tutti gli altri vettori del sistema. Che è ciò che doveva essere dimostrato (ecc.).
Adeguatezza
Sia uno dei vettori espresso linearmente attraverso tutti gli altri vettori del sistema:
e k = γ 1 e 1 + . . . + γ k - 1 e k - 1 + γ k + 1 e k + 1 + . . . + γ n e n
Spostiamo il vettore ek a destra di questa uguaglianza:
0 = γ 1 e 1 + . . . + γ k - 1 e k - 1 - e k + γ k + 1 e k + 1 + . . . + γ n e n
Poiché il coefficiente del vettore e k è uguale a - 1 ≠ 0, otteniamo una rappresentazione non banale dello zero mediante un sistema di vettori e 1, e 2, . . . , e n , e questo, a sua volta, significa questo questo sistema i vettori sono linearmente dipendenti. Che è ciò che doveva essere dimostrato (ecc.).
Conseguenza:
- Un sistema di vettori è linearmente indipendente quando nessuno dei suoi vettori può essere espresso in termini di tutti gli altri vettori del sistema.
- Un sistema di vettori che contiene un vettore zero o due vettori uguali è linearmente dipendente.
Proprietà dei vettori linearmente dipendenti
- Per i vettori bidimensionali e tridimensionali è soddisfatta la seguente condizione: due vettori linearmente dipendenti sono collineari. Due vettori collineari sono linearmente dipendenti.
- Per i vettori tridimensionali è soddisfatta la seguente condizione: tre vettori linearmente dipendenti sono complanari. (3 vettori complanari sono linearmente dipendenti).
- Per i vettori n-dimensionali è soddisfatta la seguente condizione: n+1 vettori sono sempre linearmente dipendenti.
Esempi di risoluzione di problemi che coinvolgono la dipendenza lineare o l'indipendenza lineare dei vettori
Esempio 3Controlliamo l'indipendenza lineare dei vettori a = 3, 4, 5, b = - 3, 0, 5, c = 4, 4, 4, d = 3, 4, 0.
Soluzione. I vettori sono linearmente dipendenti perché la dimensione dei vettori è inferiore al numero di vettori.
Esempio 4
Controlliamo l'indipendenza lineare dei vettori a = 1, 1, 1, b = 1, 2, 0, c = 0, - 1, 1.
Soluzione. Troviamo i valori dei coefficienti ai quali la combinazione lineare sarà uguale al vettore zero:
x1a + x2b + x3c1 = 0
Scriviamo l'equazione vettoriale in forma lineare:
x1 + x2 = 0 x1 + 2 x2 - x3 = 0 x1 + x3 = 0
Risolviamo questo sistema utilizzando il metodo di Gauss:
1 1 0 | 0 1 2 - 1 | 0 1 0 1 | 0 ~
Dalla 2a riga sottraiamo la 1a, dalla 3a alla 1a:
~ 1 1 0 | 0 1 - 1 2 - 1 - 1 - 0 | 0 - 0 1 - 1 0 - 1 1 - 0 | 0 - 0 ~ 1 1 0 | 0 0 1 - 1 | 0 0 - 1 1 | 0 ~
Dalla 1a riga sottraiamo la 2a, alla 3a aggiungiamo la 2a:
~ 1 - 0 1 - 1 0 - (- 1) | 0 - 0 0 1 - 1 | 0 0 + 0 - 1 + 1 1 + (- 1) | 0 + 0 ~ 0 1 0 | 1 0 1 - 1 | 0 0 0 0 | 0
Dalla soluzione segue che il sistema ha molte soluzioni. Ciò significa che esiste una combinazione diversa da zero di valori di tali numeri x 1, x 2, x 3 per la quale la combinazione lineare di a, b, c è uguale al vettore zero. Pertanto, i vettori a, b, c lo sono linearmente dipendente.
Se noti un errore nel testo, evidenzialo e premi Ctrl+Invio
Sia presente un insieme di vettori in uno spazio aritmetico a due dimensioni  .
.
Definizione 2.1.Insieme di vettori  chiamato linearmente indipendenti sistema di vettori, se l'uguaglianza è della forma
chiamato linearmente indipendenti sistema di vettori, se l'uguaglianza è della forma
eseguito solo per valori zero di parametri numerici  .
.
Se l’uguaglianza (2.1) può essere soddisfatta purché almeno uno dei coefficienti sia diverso da zero, allora tale sistema di vettori sarà chiamato linearmente dipendente .
Esempio 2.1. Verificare l'indipendenza lineare dei vettori



Soluzione. Creiamo un'uguaglianza della forma (2.1)
Il lato sinistro di questa espressione può diventare zero solo se la condizione è soddisfatta  , il che significa che il sistema è linearmente indipendente.
, il che significa che il sistema è linearmente indipendente.
Esempio 2.1. Ci saranno vettori? 
 linearmente indipendente?
linearmente indipendente?
Soluzione.È facile verificare che l’uguaglianza è vera per i valori  ,
,  . Ciò significa che questo sistema di vettori è linearmente dipendente.
. Ciò significa che questo sistema di vettori è linearmente dipendente.
Teorema 2.1. Se un sistema di vettori è linearmente dipendente, allora qualsiasi vettore di questo sistema può essere rappresentato come una combinazione lineare (o sovrapposizione) dei restanti vettori del sistema.
Prova. Supponiamo che il sistema di vettori  linearmente dipendente. Quindi, per definizione, esiste un insieme di numeri , tra cui almeno un numero è diverso da zero, e vale l'uguaglianza (2.1):
linearmente dipendente. Quindi, per definizione, esiste un insieme di numeri , tra cui almeno un numero è diverso da zero, e vale l'uguaglianza (2.1):
Senza perdita di generalità, assumiamo che il coefficiente diverso da zero sia , cioè  . Quindi l'ultima uguaglianza può essere divisa per e quindi espressa come vettore:
. Quindi l'ultima uguaglianza può essere divisa per e quindi espressa come vettore:
 .
.
Pertanto, il vettore è rappresentato come una sovrapposizione di vettori  . Il Teorema 1 è dimostrato.
. Il Teorema 1 è dimostrato.
Conseguenza. Se  è un insieme di vettori linearmente indipendenti, allora nessun vettore di questo insieme può essere espresso in termini degli altri.
è un insieme di vettori linearmente indipendenti, allora nessun vettore di questo insieme può essere espresso in termini degli altri.
Teorema 2.2. Se il sistema di vettori contiene un vettore nullo, allora tale sistema sarà necessariamente linearmente dipendente.
Prova. Lascia che il vettore sia un vettore zero, cioè  .
.
Quindi scegliamo le costanti (  ) come segue:
) come segue:
 , .
, .
In questo caso l’uguaglianza (2.1) è soddisfatta. Il primo termine a sinistra è uguale a zero poiché è un vettore zero. I restanti termini diventano zero se moltiplicati per zero costanti (  ). Così,
). Così,
A , che significa i vettori  linearmente dipendente. Il Teorema 2.2 è dimostrato.
linearmente dipendente. Il Teorema 2.2 è dimostrato.
La prossima domanda a cui dobbiamo rispondere è cosa numero maggiore i vettori possono formare un sistema linearmente indipendente V N spazio aritmetico bidimensionale. Nel paragrafo 2.1 è stata considerata la base naturale (1.4):

È stato stabilito che un vettore arbitrario di spazio bidimensionale è una combinazione lineare di vettori di base naturale, cioè un vettore arbitrario  è espresso in base naturale come
è espresso in base naturale come
 , (2.2)
, (2.2)
dove sono le coordinate del vettore, che sono alcuni numeri. Poi l'uguaglianza

è possibile solo per , e quindi vettori  base naturale formano un sistema linearmente indipendente. Se aggiungiamo un vettore arbitrario a questo sistema , allora, in base al corollario del Teorema 1, il sistema sarà dipendente, poiché il vettore è espresso in termini di vettori secondo la formula (2.2).
base naturale formano un sistema linearmente indipendente. Se aggiungiamo un vettore arbitrario a questo sistema , allora, in base al corollario del Teorema 1, il sistema sarà dipendente, poiché il vettore è espresso in termini di vettori secondo la formula (2.2).
Questo esempio lo mostra in N Nello spazio aritmetico bidimensionale esistono sistemi costituiti da vettori linearmente indipendenti. E se aggiungiamo almeno un vettore a questo sistema, otteniamo un sistema di vettori linearmente dipendenti. Dimostriamo che se il numero di vettori supera la dimensione dello spazio, allora sono linearmente dipendenti.
Teorema 2.3.Nello spazio aritmetico a due dimensioni non esiste un sistema costituito da più di vettori linearmente indipendenti.
Prova. Considera i vettori a dimensione arbitraria:
………………………
Permettere  . Creiamo una combinazione lineare di vettori (2.3) e uguagliamola a zero:
. Creiamo una combinazione lineare di vettori (2.3) e uguagliamola a zero:
L'uguaglianza vettoriale (2.4) è equivalente alle uguaglianze scalari per le coordinate  vettori
vettori  :
:
 (2.5)
(2.5)
Queste uguaglianze formano un sistema equazioni omogenee con persone sconosciute  . Dal numero di incognite più numero equazioni (
. Dal numero di incognite più numero equazioni (  ), allora in virtù del corollario del Teorema 9.3 della Sezione 1, il sistema omogeneo (2.5) ha soluzione diversa da zero. Di conseguenza, l'uguaglianza (2.4) è valida per alcuni valori
), allora in virtù del corollario del Teorema 9.3 della Sezione 1, il sistema omogeneo (2.5) ha soluzione diversa da zero. Di conseguenza, l'uguaglianza (2.4) è valida per alcuni valori  , tra i quali non tutti sono uguali a zero, il che significa che il sistema di vettori (2.3) è linearmente dipendente. Il Teorema 2.3 è dimostrato.
, tra i quali non tutti sono uguali a zero, il che significa che il sistema di vettori (2.3) è linearmente dipendente. Il Teorema 2.3 è dimostrato.
Conseguenza. Nello spazio a-dimensionale ci sono sistemi costituiti da vettori linearmente indipendenti e qualsiasi sistema contenente più di vettori sarà linearmente dipendente.
Definizione 2.2.Un sistema di vettori linearmente indipendenti si chiama base dello spazio, se qualsiasi vettore nello spazio può essere espresso come una combinazione lineare di questi vettori linearmente indipendenti.
2.3. Trasformazione vettoriale lineare
Consideriamo due vettori e uno spazio aritmetico bidimensionale.
Definizione 3.1.Se ogni vettore  Se è associato un vettore dello stesso spazio, allora diciamo che è data una trasformazione di uno spazio aritmetico bidimensionale.
Se è associato un vettore dello stesso spazio, allora diciamo che è data una trasformazione di uno spazio aritmetico bidimensionale.
Indicheremo questa trasformazione con . Chiameremo il vettore un'immagine. Possiamo scrivere l'uguaglianza
 . (3.1)
. (3.1)
Definizione 3.2.La trasformazione (3.1) sarà detta lineare se soddisfa le seguenti proprietà:
, (3.2)
 ,
(3.3)
,
(3.3)
dove è uno scalare arbitrario (numero).
Definiamo la trasformazione (3.1) in forma di coordinate. Consideriamo le coordinate dei vettori  E
E  vincolato dalla dipendenza
vincolato dalla dipendenza
 (3.4)
(3.4)
Le formule (3.4) definiscono la trasformazione (3.1) in forma di coordinate. Probabilità (  ) i sistemi di uguaglianze (3.4) possono essere rappresentati come una matrice
) i sistemi di uguaglianze (3.4) possono essere rappresentati come una matrice

chiamata matrice di trasformazione (3.1).
Introduciamo i vettori colonna
 ,
,
i cui elementi sono le coordinate dei vettori E di conseguenza, così  E
E  . Chiameremo d'ora in poi vettori colonna.
. Chiameremo d'ora in poi vettori colonna.
Allora la trasformazione (3.4) può essere scritta in forma matriciale
 . (3.5)
. (3.5)
La trasformazione (3.5) è lineare a causa delle proprietà delle operazioni aritmetiche sulle matrici.
Consideriamo una trasformazione la cui immagine è un vettore zero. In forma matriciale apparirà questa trasformazione
 , (3.6)
, (3.6)
e in forma coordinata – rappresentano un sistema di equazioni lineari omogenee
 (3.7)
(3.7)
Definizione 3.3.Una trasformazione lineare si dice non singolare se il determinante della matrice di trasformazione lineare è diverso da zero, cioè  . Se il determinante svanisce la trasformazione sarà degenere
. Se il determinante svanisce la trasformazione sarà degenere  .
.
È noto che il sistema (3.7) ha una soluzione banale (ovvia) – zero. Questa soluzione è unica a meno che il determinante della matrice non sia zero.
Soluzioni diverse da zero del sistema (3.7) possono presentarsi se la trasformazione lineare è degenere, cioè se il determinante della matrice è zero.
Definizione 3.4. Il rango di trasformazione (3.5) è il rango della matrice di trasformazione.
Possiamo dire che lo stesso numero è uguale al numero di righe linearmente indipendenti della matrice.
Passiamo all'interpretazione geometrica della trasformazione lineare (3.5).
Esempio 3.1. Sia data una matrice di trasformazione lineare  , Dove
, Dove  Prendiamo un vettore arbitrario
Prendiamo un vettore arbitrario  , Dove
, Dove  e trova la sua immagine:
e trova la sua immagine:  Poi il vettore
Poi il vettore  .
.
Se  , il vettore cambierà sia la lunghezza che la direzione. Nella figura 1
, il vettore cambierà sia la lunghezza che la direzione. Nella figura 1  .
.
Se  , quindi otteniamo l'immagine
, quindi otteniamo l'immagine
 ,
,
cioè un vettore  O
O  , il che significa che cambierà solo la lunghezza, ma non cambierà la direzione (Fig. 2).
, il che significa che cambierà solo la lunghezza, ma non cambierà la direzione (Fig. 2).
Esempio 3.2. Permettere  , . Troviamo l'immagine:
, . Troviamo l'immagine:
 ,
,
questo è  , O
, O  .
.
Vettore a seguito della trasformazione, ha cambiato direzione in direzione opposta, preservando la lunghezza del vettore (Fig. 3).
Esempio 3.3. Considera la matrice  trasformazione lineare. È facile dimostrare che in questo caso l'immagine del vettore coincide completamente con il vettore stesso (Fig. 4). Veramente,
trasformazione lineare. È facile dimostrare che in questo caso l'immagine del vettore coincide completamente con il vettore stesso (Fig. 4). Veramente,
 .
.
Possiamo dire che una trasformazione lineare di vettori modifica il vettore originale sia in lunghezza che in direzione. Tuttavia in alcuni casi esistono matrici che trasformano il vettore solo in direzione (esempio 3.2) o solo in lunghezza (esempio 3.1, caso  ).
).
Va notato che tutti i vettori che giacciono sulla stessa linea formano un sistema di vettori linearmente dipendenti.
Torniamo alla trasformazione lineare (3.5)

e considerare la raccolta di vettori , per cui l'immagine è un vettore nullo, quindi  .
.
Definizione 3.5. Un insieme di vettori che sono una soluzione dell'equazione  , forma un sottospazio dello spazio aritmetico bidimensionale e si chiama nucleo di trasformazione lineare.
, forma un sottospazio dello spazio aritmetico bidimensionale e si chiama nucleo di trasformazione lineare.
Definizione 3.6. Difetto di trasformazione lineare
la dimensione del nocciolo di questa trasformazione si chiama, cioè, numero maggiore vettori linearmente indipendenti, soddisfacendo l'equazione  .
.
Poiché intendiamo il rango di una matrice con il rango di una trasformazione lineare, possiamo formulare la seguente affermazione riguardo al difetto della matrice: il difetto è uguale alla differenza ![]() , dove è la dimensione della matrice e è il suo rango.
, dove è la dimensione della matrice e è il suo rango.
Se il rango della matrice di trasformazione lineare (3.5) viene ricercato con il metodo gaussiano, allora il rango coincide con il numero di elementi diversi da zero sulla diagonale principale della matrice già trasformata, e il difetto è determinato dal numero di zero righe.
Se la trasformazione lineare non è degenere, sì  , allora il suo difetto diventa zero, poiché il kernel è l'unico vettore zero.
, allora il suo difetto diventa zero, poiché il kernel è l'unico vettore zero.
Se la trasformazione lineare è degenere e  , allora il sistema (3.6) ha altre soluzioni oltre a zero, e il difetto in questo caso è già diverso da zero.
, allora il sistema (3.6) ha altre soluzioni oltre a zero, e il difetto in questo caso è già diverso da zero.
Di particolare interesse sono le trasformazioni che, pur modificando la lunghezza, non modificano la direzione del vettore. Più precisamente lasciano il vettore sulla retta contenente il vettore originario, purché la retta passi per l'origine. Tali trasformazioni saranno discusse in punto successivo 2.4.
- VKontakte 0
- Google+ 0
- OK 0
- Facebook 0