Energy called scalar physical quantity, which is a single measure of various forms of motion of matter and a measure of the transition of motion of matter from one form to another.
To characterize the various forms of motion of matter, appropriate types of energy are introduced, for example: mechanical, internal, energy of electrostatic, intranuclear interactions, etc.
Energy obeys the conservation law, which is one of the most important laws of nature.
Mechanical energy E characterizes the movement and interaction of bodies and is a function of the velocities and mutual arrangement of bodies. It is equal to the sum of kinetic and potential energies.
Kinetic energy
Consider the case when a body with mass m there is a constant force \ (~ \ vec F \) (it can be the resultant of several forces) and the force vectors \ (~ \ vec F \) and displacements \ (~ \ vec s \) are directed along one straight line in one direction. In this case, the work of force can be defined as A = F∙s... The modulus of force according to Newton's second law is F = m ∙ a, and the displacement module s with uniformly accelerated rectilinear motion, it is connected with the modules of the initial υ 1 and final υ 2 speeds and accelerations a expression \ (~ s = \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) \).
From here, for work, we get
\ (~ A = F \ cdot s = m \ cdot a \ cdot \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) = \ frac (m \ cdot \ upsilon ^ 2_2) (2) - \ frac (m \ cdot \ upsilon ^ 2_1) (2) \). (one)
A physical quantity equal to half the product of the mass of a body by the square of its speed is called kinetic energy of the body.
Kinetic energy is denoted by the letter E k.
\ (~ E_k = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (2)
Then equality (1) can be written as follows:
\ (~ A = E_ (k2) - E_ (k1) \). (3)
Kinetic energy theorem
the work of the resultant forces applied to the body is equal to the change in the kinetic energy of the body.
Since the change in kinetic energy is equal to the work of the force (3), the kinetic energy of the body is expressed in the same units as the work, that is, in joules.
If the initial speed of movement of a body with a mass m is equal to zero and the body increases its speed to the value υ , then the work of force is equal to the final value of the kinetic energy of the body:
\ (~ A = E_ (k2) - E_ (k1) = \ frac (m \ cdot \ upsilon ^ 2) (2) - 0 = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (4)
The physical meaning of kinetic energy
the kinetic energy of a body moving with a speed υ shows what work must be done by a force acting on a body at rest in order to impart this speed to it.
Potential energy
Potential energy Is the energy of interaction of bodies.
The potential energy of a body raised above the Earth is the energy of interaction between the body and the Earth by gravitational forces. The potential energy of an elastically deformed body is the energy of interaction of individual parts of the body with each other by elastic forces.
Potential are called strength, the work of which depends only on the initial and final position of the moving material point or body and does not depend on the shape of the trajectory.
With a closed trajectory, the work of the potential force is always zero. Potential forces include gravitational forces, elastic forces, electrostatic forces, and some others.
Forces whose work depends on the shape of the trajectory are called non-potential... When a material point or body moves along a closed trajectory, the work of the non-potential force is not zero.
Potential energy of interaction of the body with the Earth
Finding the work done by gravity F t when moving a body with a mass m vertically down from a height h 1 above the surface of the Earth to a height h 2 (fig. 1). If the difference h 1 – h 2 is negligible compared to the distance to the center of the Earth, then the force of gravity F m during the movement of the body can be considered constant and equal mg.
Since the displacement coincides in direction with the vector of gravity, the work of gravity is
\ (~ A = F \ cdot s = m \ cdot g \ cdot (h_1 - h_2) \). (5)
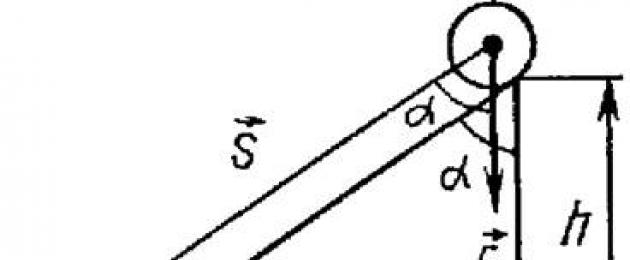
Let us now consider the movement of a body along an inclined plane. When the body moves down an inclined plane (Fig. 2), the force of gravity F t = m ∙ g doing work
\ (~ A = m \ cdot g \ cdot s \ cdot \ cos \ alpha = m \ cdot g \ cdot h \), (6)
where h- the height of the inclined plane, s- displacement modulus equal to the length of the inclined plane.

Body movement from a point V exactly WITH along any trajectory (Fig. 3) can be mentally represented as consisting of displacements along sections of inclined planes with different heights h’, h'' Etc. Work A gravity all the way from V v WITH is equal to the sum of works on separate sections of the track:
\ (~ A = m \ cdot g \ cdot h "+ m \ cdot g \ cdot h" "+ \ ldots + m \ cdot g \ cdot h ^ n = m \ cdot g \ cdot (h" + h "" + \ ldots + h ^ n) = m \ cdot g \ cdot (h_1 - h_2) \), (7)
where h 1 and h 2 - heights from the surface of the Earth, at which the points are located, respectively V and WITH.

Equality (7) shows that the work of the force of gravity does not depend on the trajectory of the body and is always equal to the product of the modulus of the force of gravity by the difference in heights in the initial and final positions.
When moving down, the work of gravity is positive; when moving up, it is negative. The work of gravity on a closed path is zero.
Equality (7) can be represented as follows:
\ (~ A = - (m \ cdot g \ cdot h_2 - m \ cdot g \ cdot h_1) \). (eight)
A physical quantity equal to the product of body weight and acceleration modulus free fall and the height to which the body is raised above the surface of the Earth is called potential energy interaction of the body and the Earth.
The work of gravity when moving a body with mass m from a point located at a height h 2, to a point located at a height h 1 from the surface of the Earth, along any trajectory is equal to the change potential energy interaction of the body and the Earth, taken with the opposite sign.
\ (~ A = - (E_ (p2) - E_ (p1)) \). (9)
Potential energy is indicated by the letter E p.
The value of the potential energy of a body raised above the Earth depends on the choice of the zero level, that is, the height at which the potential energy is taken to be zero. It is usually assumed that the potential energy of a body on the surface of the Earth is zero.
With this choice of the zero level, the potential energy E p of a body at a height h above the surface of the Earth, is equal to the product of the mass m of the body by the modulus of gravitational acceleration g and distance h it from the surface of the Earth:
\ (~ E_p = m \ cdot g \ cdot h \). (10)
The physical meaning of the potential energy of interaction of the body with the Earth
the potential energy of the body, which is acted upon by the force of gravity, is equal to the work done by the force of gravity when the body moves to the zero level.
Unlike the kinetic energy of translational motion, which can only have positive values, the potential energy of a body can be both positive and negative. Body mass m at altitude h, where h < h 0 (h 0 - zero height), has negative potential energy:
\ (~ E_p = -m \ cdot g \ cdot h \).
Potential energy of gravitational interaction
Potential energy of gravitational interaction of a system of two material points with masses m and M at a distance r one from the other, is equal to
\ (~ E_p = G \ cdot \ frac (M \ cdot m) (r) \). (eleven)
where G Is the gravitational constant, and the zero of the potential energy ( E p = 0) is adopted at r = ∞.
Potential energy of gravitational interaction of a body with mass m with the Earth where h- body height above the Earth's surface, M e is the mass of the Earth, R e is the radius of the Earth, and the zero of the potential energy is chosen at h = 0.
\ (~ E_e = G \ cdot \ frac (M_e \ cdot m \ cdot h) (R_e \ cdot (R_e + h)) \). (12)
Under the same condition for choosing the zero reference, the potential energy of the gravitational interaction of a body with mass m with Earth for low heights h (h « R e) equals
\ (~ E_p = m \ cdot g \ cdot h \),
where \ (~ g = G \ cdot \ frac (M_e) (R ^ 2_e) \) is the modulus of gravitational acceleration near the Earth's surface.
Potential energy of an elastically deformed body
Let us calculate the work done by the elastic force when the deformation (elongation) of the spring changes from some initial value x 1 to final value x 2 (Fig. 4, b, c).

The elastic force changes as the spring deforms. To find the work of the elastic force, you can take the average value of the modulus of the force (since the elastic force linearly depends on x) and multiply by the displacement modulus:
\ (~ A = F_ (upr-cp) \ cdot (x_1 - x_2) \), (13)
where \ (~ F_ (upr-cp) = k \ cdot \ frac (x_1 - x_2) (2) \). From here
\ (~ A = k \ cdot \ frac (x_1 - x_2) (2) \ cdot (x_1 - x_2) = k \ cdot \ frac (x ^ 2_1 - x ^ 2_2) (2) \) or \ (~ A = - \ left (\ frac (k \ cdot x ^ 2_2) (2) - \ frac (k \ cdot x ^ 2_1) (2) \ right) \). (14)
A physical quantity equal to half the product of the stiffness of a body by the square of its deformation is called potential energy an elastically deformed body:
\ (~ E_p = \ frac (k \ cdot x ^ 2) (2) \). (15)
From formulas (14) and (15) it follows that the work of the elastic force is equal to the change in the potential energy of an elastically deformed body, taken with the opposite sign:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (sixteen)
If x 2 = 0 and x 1 = X, then, as can be seen from formulas (14) and (15),
\ (~ E_p = A \).
The physical meaning of the potential energy of a deformed body
the potential energy of an elastically deformed body is equal to the work performed by the elastic force during the transition of the body to a state in which the deformation is zero.
Potential energy characterizes interacting bodies, and kinetic energy characterizes moving bodies. Both potential and kinetic energy change only as a result of such interaction of bodies, in which the forces acting on the bodies perform work other than zero. Let us consider the question of energy changes during the interactions of bodies that form a closed system.
Closed system Is a system that is not affected by external forces or the action of these forces is compensated... If several bodies interact with each other only by gravitational forces and elastic forces and no external forces act on them, then for any interactions of bodies, the work of elastic forces or gravitational forces is equal to the change in the potential energy of the bodies, taken with the opposite sign:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (17)
According to the kinetic energy theorem, the work of the same forces is equal to the change in kinetic energy:
\ (~ A = E_ (k2) - E_ (k1) \). (eighteen)
From a comparison of equalities (17) and (18), it can be seen that the change in the kinetic energy of bodies in a closed system is equal in absolute value to the change in the potential energy of the system of bodies and is opposite to it in sign:
\ (~ E_ (k2) - E_ (k1) = - (E_ (p2) - E_ (p1)) \) or \ (~ E_ (k1) + E_ (p1) = E_ (k2) + E_ (p2) \). (nineteen)
Energy conservation law in mechanical processes:
the sum of the kinetic and potential energy of bodies that make up a closed system and interact with each other by the forces of gravity and the forces of elasticity, remains constant.
The sum of the kinetic and potential energy of bodies is called full mechanical energy.
Let us give simplest experience... Let's throw up a steel ball. Having informed the initial speed υ start, we will give it kinetic energy, because of which it will begin to rise upward. The action of gravity leads to a decrease in the speed of the ball, and hence its kinetic energy. But the ball rises higher and higher and acquires more and more potential energy ( E p = m ∙ g ∙ h). Thus, kinetic energy does not disappear without a trace, but it is converted into potential energy.
At the moment of reaching the top point of the trajectory ( υ = 0) the ball is completely deprived of kinetic energy ( E k = 0), but at the same time its potential energy becomes maximum. Then the ball changes its direction of motion and moves downward with increasing speed. Now the reverse transformation of potential energy into kinetic one takes place.
The law of conservation of energy reveals physical meaning concepts work:
the work of gravitational forces and elastic forces, on the one hand, is equal to an increase in kinetic energy, and on the other hand, to a decrease in the potential energy of bodies. Consequently, work is equal to the energy converted from one type to another.
Mechanical Energy Change Law
If the system of interacting bodies is not closed, then its mechanical energy is not conserved. The change in the mechanical energy of such a system is equal to the work of external forces:
\ (~ A_ (vn) = \ Delta E = E - E_0 \). (twenty)
where E and E 0 - total mechanical energies of the system in the final and initial states, respectively.
An example of such a system is a system in which non-potential forces act along with potential forces. Non-potential forces include friction forces. In most cases, when the angle between the friction force F r body is π radian, the work of the friction force is negative and equal to
\ (~ A_ (tr) = -F_ (tr) \ cdot s_ (12) \),
where s 12 - body path between points 1 and 2.
Frictional forces during movement of the system reduce its kinetic energy. As a result of this, the mechanical energy of a closed non-conservative system always decreases, turning into the energy of non-mechanical forms of motion.
For example, a car moving along a horizontal section of the road, after turning off the engine, travels a certain distance and stops under the influence of friction forces. The kinetic energy of the vehicle's translational motion became zero, and the potential energy did not increase. During the braking of the vehicle, heating of the brake pads, vehicle tires and asphalt occurred. Consequently, as a result of the action of friction forces, the kinetic energy of the car did not disappear, but turned into the internal energy of the thermal motion of molecules.
The law of conservation and transformation of energy
in any physical interactions, energy is converted from one form to another.
Sometimes the angle between the friction force F tr and elementary displacement Δ r is zero and the work of the friction force is positive:
\ (~ A_ (tr) = F_ (tr) \ cdot s_ (12) \),
Example 1... Let, external force F acts on the bar V that can slide on the cart D(fig. 5). If the carriage moves to the right, then the work of the sliding friction force F tr2 acting on the trolley from the side of the bar is positive:

Example 2... When the wheel is rolling, its rolling friction force is directed along the movement, since the point of contact of the wheel with the horizontal surface moves in the direction opposite to the direction of the wheel's movement, and the work of the friction force is positive (Fig. 6):

Literature
- O.F. Kabardin Physics: Ref. materials: Textbook. manual for students. - M .: Education, 1991 .-- 367 p.
- Kikoin I.K., Kikoin A.K. Physics: Textbook. for 9 cl. wednesday shk. - M .: Pro-sveshenie, 1992 .-- 191 p.
- Elementary physics textbook: Textbook. allowance. In 3 volumes / Ed. G.S. Landsberg: vol. 1. Mechanics. Heat. Molecular physics... - M .: Fizmatlit, 2004 .-- 608 p.
- Yavorskiy B.M., Seleznev Yu.A. A reference guide to physics for university applicants and self-education. - M .: Nauka, 1983 .-- 383 p.
2.4.1. Kinetic energy mechanical system. The kinetic energy of a material point of mass moving with speed is called the quantity
The kinetic energy of a mechanical system is the sum of the kinetic energies of the material points included in this system:
In cases where the mass of the system is distributed continuously, the summation in expression (7) is replaced by integration over the distribution area.
The relationship between the values of the kinetic energy of a mechanical system in two frames of reference, one of which is stationary, and the other moves translationally with speed, where point C is the center of mass of the mechanical system, is given by Koenig's theorem:
![]() . (8)
. (8)
Here ![]() - kinetic energy of a mechanical system in a moving coordinate system.
- kinetic energy of a mechanical system in a moving coordinate system.
Using expressions (6, 7, 8) allows you to write formulas for calculating the kinetic energy solid:
With the translational movement of a body with a mass at a speed
When rotating with an angular velocity around a fixed axis of a body with a moment of inertia
for plane-parallel motion of a rigid body with angular velocity at the value of the central moment of inertia about the axis perpendicular to the plane of motion, and the value of the moment of inertia about the instantaneous axis of rotation
![]() . (11)
. (11)
2.4.2. Energy characteristics... The energy characteristics of the force include its power, work and potential energy.
Power force, the point of application of which moves with speed, is called the value
Work strength on an elementary interval time and the elementary displacement of the application point corresponding to this time interval is determined by the rule
Work strength on a finite interval time and the corresponding change in the radius - the vector of the point of application of this force from to - is called the value
 . (14)
. (14)
The work of the moment of a pair of forces is calculated in the same way.
Potential energy is determined only in those cases when expression (13) is a total differential:
When condition (15) is satisfied, the force is said to be potential. Relationships connecting the projections of the force on the axis of the selected coordinate system with the function:
If the point of application of the force has moved from position to position, then by integrating (15) one can obtain
 . (17)
. (17)
Remark: potential energy is determined with accuracy up to a constant term; This feature allows us to assume the potential energy to be zero at the point we choose (for example, at the origin).
In the case when the expression of potential energy can be written down for the totality of forces acting on a mechanical system, the mechanical system is called conservative... Such mechanical systems have important features - work acting forces does not depend on the type of trajectory and the law of motion along it; work when driving on closed loop is equal to zero.
Conditions under which the function exists:
2.4.3. The theorem on the change in kinetic energy. Writing a theorem about the change in the kinetic energy of a mechanical system in differential form:
The time derivative of the kinetic energy of a mechanical system is equal to the power of external and internal forces.
Integral form of writing the theorem about the change in kinetic energy
![]() , (20)
, (20)
where ; ; ; ...
In the particular case, when the expression for potential energy can be written down for the aggregate of external and internal forces of the system, the law of conservation of total mechanical energy is fulfilled
and the system itself turns out to be conservative.
EXAMPLE 3. For the mechanical system shown in Fig. 2, obtain differential equation movement of cargo.
SOLUTION. Let us use the theorem on the change in kinetic energy in differential form (19). Let us mentally free ourselves from constraints by applying appropriate reactions to the bodies of the mechanical system (see Figure 2). Note: the forces applied at the stationary center of the masses of the coaxial block are not shown, since their power is zero.

Let's compose an expression for the kinetic energy of a mechanical system.
Integral (final) form... The theorem on the change in the kinetic energy of a material point: the change in the kinetic energy of a material point at some of its displacement is equal to the algebraic sum of the work of all forces acting on this point at the same displacement.
The theorem on the change in the kinetic energy of a mechanical system is formulated: the change in the kinetic energy of a mechanical system when it moves from one position to another is equal to the sum of the work of all external and internal cules applied to the system on this movement:
In the case of an unchangeable system, the sum of the work of internal forces on any displacement is equal to zero (), then
The law of conservation of mechanical energy. When a mechanical system moves under the action of forces that have a potential, changes in the kinetic energy of the system are determined by the dependencies:
Where ,
The sum of the kinetic and potential energies of the system is called full mechanical energy systems.
In this way, when a mechanical system moves in a stationary potential field, the total mechanical energy of the system during movement remains unchanged.
Task. A mechanical system under the influence of gravity starts to move from a state of rest. Taking into account the sliding friction of body 3, neglecting other resistance forces and the masses of the threads, assumed to be inextensible, determine the speed and acceleration of body 1 at the moment when the path traveled by it becomes equal to s(fig. 3.70).
In the task, accept:
Solution. The mechanical system is acted upon by active forces,,. Applying the principle of freeing the system from the constraints, we will show the reactions of the hinged-fixed support 2 and a rough inclined surface. The directions of the velocities of the bodies of the system will be depicted taking into account the fact that body 1 is descending.
We solve the problem using the theorem on the change in the kinetic energy of a mechanical system:
where T and - kinetic energy of the system in the initial and final positions; - the algebraic sum of the work of external forces applied to the system, on the movement of the system from the initial position to the final one; - the sum of the work of the internal forces of the system on the same displacement.
For the system under consideration, consisting of absolutely rigid bodies connected by inextensible threads:
Since the system was at rest in the initial position, then. Hence:
The kinetic energy of the system is the sum of the kinetic energies of bodies 1, 2, 3:
The kinetic energy of the load 1, moving translationally, is equal to:
Kinetic energy of block 2, rotating around the axis Оz, perpendicular to the plane of the drawing:
Kinetic energy of body 3 in its translational motion:
In this way,
The expression for kinetic energy contains the unknown velocities of all bodies in the system. It is necessary to start the definition with. Let's get rid of unnecessary unknowns by making up the equations of connections.
The constraint equations are nothing more than the kinematic relationships between the velocities and displacements of points in the system. When drawing up the equations of constraints, we will express all the unknown speeds and displacements of the bodies of the system in terms of the speed and displacement of the load 1.
The speed of any point of the rim of small radius is equal to the speed of body 1, as well as the product angular velocity body 2 and radius of rotation r:
From here we express the angular velocity of the body 2:
The rotational speed of any point of the rim of a large-radius block, on the one hand, is equal to the product of the angular velocity of the block and the radius of rotation, and on the other hand, the speed of the body 3:
Substituting the value of the angular velocity, we get:
Having integrated the expressions (a) and (b) under the initial conditions, we write down the ratio of the displacements of the points of the system:
Knowing the basic dependences of the velocities of the points of the system, let us return to the expression for the kinetic energy and substitute equations (a) and (b) into it:
The moment of inertia of body 2 is:
Substituting the values of the masses of the bodies and the moment of inertia of the body 2, we write:
Determination of the sum of the work of all external forces of the system at a given displacement.
Now, according to the theorem on the change in the kinetic energy of a mechanical system, we equate the values T and
The speed of body 1 is obtained from the expression (g)
The acceleration of body 1 can be determined by differentiating equality (r) in time.
The kinetic energy of a mechanical system is the sum of the kinetic energies of all its material points:
Let's calculate the differential from the expression of kinetic energy and perform some simple transformations:

Omitting intermediate values and applying the symbol previously introduced to denote elementary work, we write:

So, the differential of the kinetic energy of a mechanical system is equal to the sum of the elementary work of all external and internal forces acting on the points of the system. This is the essence of the theorem on the change in kinetic energy.
Note that the sum of the work of the internal forces of the system in the general case is not equal to zero. It vanishes only in some special cases: when an absolutely rigid body serves as a system; a system of absolutely rigid bodies interacting with the help of non-deformable elements (ideal hinges, absolutely rigid rods, inextensible threads, etc.). For this reason, the theorem on the change in kinetic energy is the only one of the general theorems of dynamics that takes into account the effect of the action of internal forces.
One can be interested in the change in kinetic energy not over an infinitely small period of time, as is done above, but over a certain finite period of time. Then, using integration, you can get:

Here are the values of the kinetic energy, respectively, at the moments of time - the sum of the total work of external and internal forces for the considered period of time.
The resulting equality expresses the theorem on the change in kinetic energy in the final (integral) form, which can be formulated as follows: the change in kinetic energy during the transition of a mechanical system from one position to another is equal to the sum of the total work of all external and internal forces.

Lecture 5. The theorem on the change in kinetic energy
5. 1. Work of power
May the strength ![]() Is the resultant of all forces of the system, applied to point P, and ( dx,
dy,
dz)
- elementary movement of point P along its trajectory P 1 P 2 (Fig. 5.1). Elementary work dA forces called dot product
Is the resultant of all forces of the system, applied to point P, and ( dx,
dy,
dz)
- elementary movement of point P along its trajectory P 1 P 2 (Fig. 5.1). Elementary work dA forces called dot product
Elementary work is a scalar. If is the angle between the force and the direction of displacement, then expression (5.1) can be represented as
where is the projection of the force on the direction of elementary displacement (or the direction of the point's velocity).
The sign of the elementary work depends on the sign of the function. If - an acute angle, then, if - an obtuse angle, then, if, then.
Let the point R makes the final movement from position to position, describing an arc. We split the arc into n arbitrary small sections, indicating the length of the section with the number k across . Then the elementary work of the force on k-th section will be equal to, and all the way from to - the amount of work on individual sections

We obtain the exact value of the work, passing to the limit, provided that the number of sections n increases indefinitely, and the length of each section decreases:
 .
.
Such a limit is called a curvilinear integral of the first kind along an arc and is written as follows
![]() . (5.3)
. (5.3)
Integration result is complete work A strength F on the considered final displacement along the path.
5. 1. 1. Work of gravity
Let m - point mass, g- acceleration of gravity. Then

Calculating the work by formulas (5.1) and (5.3), we have

where is the height of the point lowering.
When lifting a point, therefore,.
5. 1. 2. Work of the linear elastic force

Let the material point R moves along the axis Oh(fig. 5.3) under the action of the spring to which it is attached. If at , , then the spring is deformed and at small deviations of the point, it can be assumed that an elastic force is applied to it from the side of the spring. Then the work of the elastic force on displacement x 0 x 1 will be equal
 . (5.5)
. (5.5)
The work of the elastic force is equal to half the product of the stiffness coefficient by the difference between the squares of the initial and final elongation (or compressions) of the spring.
5. 1. 3. Elementary work of forces applied to a solid
Consider the motion of a body in a plane. Let O- an arbitrarily selected point on a solid (Figure 5.4). Let's call it a pole. Then the movement of the body in the plane can be represented as the sum of the simplest: translational movement together with the pole and the rotation of the body around the pole. Then, the speed of a point relative to a fixed coordinate system is defined as the geometric sum of two speeds
where is the pole's velocity, is the vector of the angular velocity of the rigid body, is the Euler's velocity, that is, the velocity of the point as it rotates around the pole.

We will represent a rigid body as a mechanical system consisting of N individual points, the mutual distance between which does not change.
We calculate the displacement of a point under the action of a force:
Then .
An elementary work, according to (5.1), is written as follows
Using the properties of the mixed product of vectors ![]() , we rewrite the last expression as
, we rewrite the last expression as
Let be the resultant of all forces, external and internal (Figure 5.4), applied at a point of the body, i.e.
![]() .
.
Then (a) will be written like this

According to (3.1 and 3.2), main vector and the main moment of the internal forces of the system are equal to zero, we obtain
here: ![]() Is the main vector,
Is the main vector, ![]() - the main moment of external forces relative to the point O.
- the main moment of external forces relative to the point O.
Special cases
A. The translational motion of a rigid body... All points of the body have the same displacements (Fig.5.5, a) both in absolute value and in direction, then, from (5.6), we obtain (here):
![]() . (5.7)
. (5.7)
B. Rotation of a rigid body around a fixed axis... Let the axis z passes through the pole O(Fig.5.5b). Then , ; from (5.6) we obtain
![]() . (5.8)
. (5.8)

Example. Coil mass m and radius R driven by constant force F applied at point A(fig. 5.6). The coil rolls to the right without slipping on a rough surface.

Calculate the work of all external forces if the center of the coil has moved a distance, is the rolling friction coefficient, is the friction force, r is the radius of the coil core to which the force is applied.
Solution. The coil moves flat. Since rolling occurs without sliding, the instantaneous center of velocities is at the point where the coil touches the plane, i.e. at the point R(Figure 5.6). Let us direct the S axis horizontally to the right. In accordance with the direction of movement, we take the positive direction of the rotation angle counterclockwise.
Let the center of the coil WITH will move to. This will rotate the coil through an angle. Then, whence
Taking the point R for the instantaneous axis of rotation, we calculate the elementary work by the formula (5.8):
 (a)
(a)
Here: the lines of action of the forces and mg intersect the axis of rotation, therefore; further, where N- the strength of the normal reaction.
To determine the required work, it remains to take a definite integral from (a) in the range from 0 to SA... We get
5. 2. Force field. Power function. Potential energy
Suppose that a point moves in some space and a force acts on it from the side of space, which depends on the position of the point in this space, but does not depend on the speed of the point. In this case, they say that the space is given force field and also that the point is moving in the force field. The corresponding concepts for the system of material points are similar.
Forces depending on the position of the points of their application are often encountered in mechanics. For example, an elastic force applied to a material point that moves along a horizontal line under the action of a spring. The most important example of a force field in nature is the gravitational field: the action of the Sun on a planet of a given mass is determined at each point in space by the law universal gravitation.
The force field is called potential if there is a scalar function U, depending only on the coordinates,, point-point of the material system (possibly on time), such that
The function is called power function.
Consider the properties of the strength function.
Elementary work (5.1) is related to the strength function as follows
In this way, the elementary work of force in a potential force field is equal to full differential from power function ui.
Full work forces in the section from the point ![]() to the point
to the point ![]() (Figure 5.1)
(Figure 5.1)
those. ... (5.10)
From the expressions obtained it follows that
1. the work of force in a potential force field along any closed path is equal to zero;
2.the work of the force in a potential force field depends only on the position of the final and initial points, but the path of movement itself does not matter.
Potential energy. Potential energy P at the considered point of the force field R call the work done by the field forces acting on a material point when it moves from a point R to start point 1, i.e.
P= or P= ![]()
Link the strength function U with potential energy. We have
Examples of calculating potential energy
1. Homogeneous gravity field... Let m- point mass; g - acceleration of gravity. Then (fig.5.2)
2. Elastic spring force field... Let the material point move along the axis Oh(fig. 5.3) under the action of the spring to which it is attached. If at, the spring is not deformed, then, setting in formula (5.5), we obtain
![]() .
.
5. 3. Kinetic energy
5. 3. 1. Kinetic energy of the system. Koenig's theorem
The kinetic energy of a material point is called half of the product of the mass of a point by the square of its velocity, i.e.
.
Kinetic energy is a scalar positive value. In the SI system, the unit of measurement for kinetic energy is joule: ![]() .
.
The kinetic energy of a mechanical system is the sum of the kinetic energies of all points included in the system:
 (5.11)
(5.11)
The velocities of points of system (5.1) are determined with respect to a fixed frame of reference.

Let's align the origin of coordinates with the center of mass of the system. Suppose that the mechanical system, together with the coordinate system, moves translationally relative to the stationary coordinate system (Figure 5.7). Point is the point of the system.
Then, based on the theorem on the addition of velocities, the absolute velocity of the point Rk. system will be written as the vector sum of the portable and relative speeds:
![]() , (a)
, (a)
where is the speed of the origin of the moving coordinate system (portable speed, i.e. the speed of the center of mass of the system); - point speed Rk relative to the moving coordinate system Oohz (relative speed).
Substituting (a) into formula (5.11), we obtain
 (5.12)
(5.12)
Here is the mass of the entire system.
The radius vector of the center of mass of the system in the moving coordinate system is determined, according to (2.1), -  , where
, where  , i.e.
, i.e. ![]() ... Since the origin is O is the center of mass of the system, then, then, i.e. the second sum in expression (5.12) is equal to zero.
... Since the origin is O is the center of mass of the system, then, then, i.e. the second sum in expression (5.12) is equal to zero.
Thus, the kinetic energy of system (5.12) has the form
 (5.13)
(5.13)
This equality determines Koenig's theorem.
Theorem. The kinetic energy of the system is equal to the sum of the kinetic energy that would have a material point located in the center of mass of the system and having a mass equal to the mass of the system, and the kinetic energy of motion of the system relative to the center of mass.
5. 3. 2. Kinetic energy of a solid
A rigid body is a special case of a mechanical system and is considered as a continuously distributed mass, then all the sums included in the expression for the kinetic energy of the system go over into integrals. So, for a rigid body, formula (5.11) takes the form
![]() . (5.14)
. (5.14)

1. Kinetic energy of a rigid body moving forward.
With this type of movement, the speeds of all points of the body are the same (Figure 5.8). Carrying out in formula (5.14) outside the integral sign, we obtain
![]() . (5.15)
. (5.15)
The kinetic energy of a rigid body moving translationally is equal to half the product of the body's massMby the square of its speed.
2. Kinetic energy of a rigid body rotating around a fixed axis

Speed module V any point of a rigid body rotating around a fixed axis is equal to, where is the modulus of the angular velocity of the rigid body, is the distance from the point to the axis of rotation z(fig. 5.9). Substituting into formula (5.14), we obtain
here ![]() - moment of inertia of a rigid body about the axis z.
- moment of inertia of a rigid body about the axis z.
The kinetic energy of a rigid body rotating around a fixed axis is equal to half the product of the moment of inertia of the body relative to the axis of rotation by the square of the angular velocity of the body.
3. Kinetic energy of a rigid body in a plane-parallel motion
In a plane-parallel motion, the speed of any point of the body consists of the geometric sum of the speed of the pole and the speed of the point as it rotates around the pole. Let the body move flat in the plane Oxy, then
|| ... For the pole we choose the center of mass of the body, then in the formula (5.13), the speed is the speed of the point k body as it rotates about the pole (center of mass) and is equal to ![]() where the distance k-
th point to the pole. Then (5.13) can be rewritten
where the distance k-
th point to the pole. Then (5.13) can be rewritten

Bearing in mind that ![]() - moment of inertia of the body about the axis z passing through the pole WITH, the last expression can be rewritten as
- moment of inertia of the body about the axis z passing through the pole WITH, the last expression can be rewritten as
![]() , (5.17)
, (5.17)
with plane-parallel motion of a body, kinetic energy is made up of the kinetic energy of translational motion together with the center of mass and kinetic energy from rotation around an axis passing through the center of mass and perpendicular to the plane of motion.
5. 4. Theorem on the change in kinetic energy
5. 4. 1. The theorem on the change in the kinetic energy of a point

Let's find the connection between work and speed change. Let a material point with mass m moves along the axis Oh under the action of a force, for example, a compressed or expanded spring, fixed at the origin, - to a point O(fig. 5.10). The equation of motion of a point has the form
We multiply both sides of this equation by, and, taking into account that  , we get
, we get
 . (5.19)
. (5.19)
On the right-hand side of this equality, replace V x by and multiply by dt right and left sides. Then
 . (5.20)
. (5.20)
In this form, equality has a very clear meaning: when the point is shifted by dx, the force does work, as a result of which the value changes point kinetic energy characterizing the motion of a point and, in particular, the modulus of its velocity. If a point shifts from position to, and its velocity changes from to, then, integrating (5.20), we have
 . (5.21)
. (5.21)
Considering that  , we finally find
, we finally find
 . (5.22)
. (5.22)
The change in the kinetic energy of a material point during any movement is equal to the work of the force acting on the point at the same movement.
Carrying out all the previous procedures, we get
 ,
,
here is the arc along which the point moves (Fig. 5.11).
5. 4. 2. The theorem on the change in the kinetic energy of the system
Let the points of the system with mass moved so that their radius vectors in the inertial frame of reference received an increment. Let us find how the kinetic energy has changed in this case T systems.
According to (5.11), the kinetic energy of the system
 .
.
We calculate the differential of the kinetic energy of the system and transform the resulting expression

here 
Taking into account that ![]() , where is the acceleration of point a and are the resultants of external and internal forces applied to the point, we rewrite the last equality in the form
, where is the acceleration of point a and are the resultants of external and internal forces applied to the point, we rewrite the last equality in the form
In this way,
![]() . (5.23)
. (5.23)
The last equality expresses the theorem on the change in the kinetic energy of a mechanical system in differential form: the differential of the kinetic energy of the system is equal to the elementary work of all forces of the system.
A special case... For an absolutely rigid body, the sum of the work of all internal forces of the system is equal to zero:
![]() .
.
Consequently, the theorem on the change in kinetic energy (5.23) for a rigid body can be written in the form
The change in the kinetic energy of a rigid body during any elementary displacement is equal to the elementary work of external forces acting on the body.
If both sides of (5.24) are integrated between two positions - initial and final, in which, respectively, the kinetic energy and, we obtain
![]() . (5.25)
. (5.25)
Example 1... Disc mass m= 5 kg and the radius is set in motion by a constant force applied at the point A(fig. 5.6). The disc rolls on a rough surface to the right without sliding. Determine the speed of the center of mass WITH coil at the moment when it moves a distance, sliding friction coefficient,, radius of gyration of the disc
Solution. The disc is in a flat motion. Let us write down the theorem on the change in the kinetic energy for a rigid body
Let's calculate the kinetic energy of the disk. At the initial moment of time, the disk was at rest, i.e. ... Kinetic energy at the end position of the disc
- In contact with 0
- Google+ 0
- OK 0
- Facebook 0






