Att lösa system av linjära algebraiska ekvationer (SLAE) är utan tvekan det viktigaste ämnet i en linjär algebrakurs. Ett stort antal problem från alla grenar av matematik handlar om att lösa system linjära ekvationer. Dessa faktorer förklarar anledningen till denna artikel. Materialet i artikeln är valt och strukturerat så att du med dess hjälp kan
- välj den optimala metoden för att lösa ditt system av linjära algebraiska ekvationer,
- studera teorin om den valda metoden,
- lös ditt linjära ekvationssystem genom att överväga detaljerade lösningar på typiska exempel och problem.
Kort beskrivning av artikelmaterialet.
Först ger vi alla nödvändiga definitioner, begrepp och introducerar notationer.
Därefter kommer vi att överväga metoder för att lösa system av linjära algebraiska ekvationer där antalet ekvationer är lika med antalet okända variabler och som har en unik lösning. För det första kommer vi att fokusera på Cramers metod, för det andra kommer vi att visa matrismetoden för att lösa sådana ekvationssystem, och för det tredje kommer vi att analysera Gauss-metoden (metoden för sekventiell eliminering av okända variabler). För att konsolidera teorin kommer vi definitivt att lösa flera SLAEs på olika sätt.
Efter detta kommer vi att gå vidare till att lösa system av linjära algebraiska ekvationer av allmän form, där antalet ekvationer inte sammanfaller med antalet okända variabler eller systemets huvudmatris är singular. Låt oss formulera Kronecker-Capelli-satsen, som gör att vi kan fastställa kompatibiliteten för SLAE. Låt oss analysera lösningen av system (om de är kompatibla) med hjälp av konceptet med en basmoll i en matris. Vi kommer också att överväga Gauss-metoden och i detalj beskriva lösningarna på exemplen.
Vi kommer definitivt att uppehålla oss vid strukturen för den allmänna lösningen av homogena och inhomogena system av linjära algebraiska ekvationer. Låt oss ge begreppet ett fundamentalt system av lösningar och visa hur den allmänna lösningen av en SLAE skrivs med hjälp av vektorerna för det grundläggande lösningssystemet. För en bättre förståelse, låt oss titta på några exempel.
Avslutningsvis kommer vi att överväga ekvationssystem som kan reduceras till linjära, samt olika problem i lösningen av vilka SLAE:er uppstår.
Sidnavigering.
Definitioner, begrepp, beteckningar.
Vi kommer att betrakta system av p linjära algebraiska ekvationer med n okända variabler (p kan vara lika med n) av formen
Okända variabler, - koefficienter (vissa reella eller komplexa tal), - fria termer (även reella eller komplexa tal).
Denna form av inspelning SLAE kallas samordna.
I matrisform att skriva detta ekvationssystem har formen,
Var  - systemets huvudmatris, - en kolumnmatris med okända variabler, - en kolumnmatris med fria termer.
- systemets huvudmatris, - en kolumnmatris med okända variabler, - en kolumnmatris med fria termer.
Lägger vi till en matriskolumn av fria termer till matris A som (n+1):e kolumnen får vi s.k. utökad matris linjära ekvationssystem. Vanligtvis betecknas en utökad matris med bokstaven T, och kolumnen med fria termer separeras med en vertikal linje från de återstående kolumnerna, det vill säga, 
Lösa ett system av linjära algebraiska ekvationer kallas en uppsättning värden av okända variabler som förvandlar alla ekvationer i systemet till identiteter. Matrisekvationen för givna värden för de okända variablerna blir också en identitet.
Om ett ekvationssystem har minst en lösning, så kallas det gemensam.
Om ett ekvationssystem inte har några lösningar, så kallas det icke-fogad.
Om en SLAE har en unik lösning, så kallas den vissa; om det finns mer än en lösning, då – osäker.
Om de fria termerna för alla ekvationer i systemet är lika med noll ![]() , då kallas systemet homogen, annars - heterogen.
, då kallas systemet homogen, annars - heterogen.
Lösa elementära system av linjära algebraiska ekvationer.
Om antalet ekvationer i ett system är lika med antalet okända variabler och determinanten för dess huvudmatris inte är lika med noll, kommer sådana SLAE att kallas elementärt. Sådana ekvationssystem har en unik lösning, och i fallet homogent system alla okända variabler är noll.
Vi började studera sådana SLAEs i gymnasium. När vi löste dem tog vi en ekvation, uttryckte en okänd variabel i termer av andra och substituerade den i de återstående ekvationerna, tog sedan nästa ekvation, uttryckte nästa okända variabel och substituerade den med andra ekvationer, och så vidare. Eller så använde de additionsmetoden, det vill säga de lade till två eller flera ekvationer för att eliminera några okända variabler. Vi kommer inte att uppehålla oss vid dessa metoder i detalj, eftersom de i huvudsak är modifieringar av Gauss-metoden.
De huvudsakliga metoderna för att lösa elementära system av linjära ekvationer är Cramermetoden, matrismetoden och Gaussmetoden. Låt oss reda ut dem.
Lösa linjära ekvationssystem med Cramers metod.
Antag att vi behöver lösa ett system av linjära algebraiska ekvationer 
där antalet ekvationer är lika med antalet okända variabler och determinanten för systemets huvudmatris skiljer sig från noll, det vill säga .
Låta vara bestämningsfaktorn för systemets huvudmatris, och ![]() - determinanter för matriser som erhålls från A genom ersättning 1:a, 2:a, …, n:a kolumnen respektive kolumnen med fria medlemmar:
- determinanter för matriser som erhålls från A genom ersättning 1:a, 2:a, …, n:a kolumnen respektive kolumnen med fria medlemmar: 
Med denna notation beräknas okända variabler med formlerna för Cramers metod som  . Så här hittas lösningen till ett system av linjära algebraiska ekvationer med Cramers metod.
. Så här hittas lösningen till ett system av linjära algebraiska ekvationer med Cramers metod.
Exempel.
Cramers metod  .
.
Lösning.
Systemets huvudmatris har formen  . Låt oss beräkna dess determinant (om nödvändigt, se artikeln):
. Låt oss beräkna dess determinant (om nödvändigt, se artikeln): 
Eftersom determinanten för systemets huvudmatris inte är noll, har systemet en unik lösning som kan hittas med Cramers metod.
Låt oss komponera och beräkna de nödvändiga bestämningsfaktorerna ![]() (vi får determinanten genom att ersätta den första kolumnen i matris A med en kolumn med fria termer, determinanten genom att ersätta den andra kolumnen med en kolumn med fria termer och genom att ersätta den tredje kolumnen i matris A med en kolumn med fria termer) :
(vi får determinanten genom att ersätta den första kolumnen i matris A med en kolumn med fria termer, determinanten genom att ersätta den andra kolumnen med en kolumn med fria termer och genom att ersätta den tredje kolumnen i matris A med en kolumn med fria termer) : 
Hitta okända variabler med formler  :
:
Svar:
Den största nackdelen med Cramers metod (om den kan kallas en nackdel) är komplexiteten i att beräkna determinanter när antalet ekvationer i systemet är fler än tre.
Lösa system av linjära algebraiska ekvationer med hjälp av matrismetoden (med en invers matris).
Låt ett system av linjära algebraiska ekvationer ges i matrisform, där matrisen A har dimensionen n gånger n och dess determinant är icke-noll.
Eftersom , då matris A är inverterbar, det vill säga den existerar invers matris. Om vi multiplicerar båda sidor av likheten med vänster får vi en formel för att hitta en matriskolumn med okända variabler. Så här fick vi en lösning på ett system av linjära algebraiska ekvationer med matrismetoden.
Exempel.
Lös system av linjära ekvationer matrismetod.
Lösning.
Låt oss skriva om ekvationssystemet i matrisform: 
Därför att
då kan SLAE lösas med matrismetoden. Med hjälp av den inversa matrisen kan lösningen på detta system hittas som  .
.
Låt oss konstruera en invers matris med hjälp av en matris från algebraiska tillägg av element i matris A (om nödvändigt, se artikeln): 
Det återstår att beräkna matrisen av okända variabler genom att multiplicera den inversa matrisen  till en matriskolumn med gratismedlemmar (om nödvändigt, se artikeln):
till en matriskolumn med gratismedlemmar (om nödvändigt, se artikeln): 
Svar:
 eller i en annan notation x 1 = 4, x 2 = 0, x 3 = -1.
eller i en annan notation x 1 = 4, x 2 = 0, x 3 = -1.
Huvudproblemet när man hittar lösningar på system med linjära algebraiska ekvationer med hjälp av matrismetoden är komplexiteten i att hitta den inversa matrisen, särskilt för kvadratiska matriser av ordning högre än tredje.
Lösa linjära ekvationssystem med Gauss-metoden.
Antag att vi behöver hitta en lösning på ett system med n linjära ekvationer med n okända variabler 
vars determinant för huvudmatrisen skiljer sig från noll.
Kärnan i Gauss-metoden består av att sekventiellt eliminera okända variabler: först exkluderas x 1 från alla ekvationer i systemet, med början från den andra, sedan exkluderas x 2 från alla ekvationer, med början från den tredje, och så vidare, tills endast den okända variabeln x n finns kvar i den sista ekvationen. Denna process att transformera systemekvationer för att sekventiellt eliminera okända variabler kallas direkt Gaussisk metod. Efter att ha slutfört det framåtriktade slaget av Gaussmetoden, hittas x n från den sista ekvationen, med hjälp av detta värde från den näst sista ekvationen, x n-1 beräknas, och så vidare, x 1 hittas från den första ekvationen. Processen att beräkna okända variabler när man går från den sista ekvationen i systemet till den första kallas invers av Gaussmetoden.
Låt oss kort beskriva algoritmen för att eliminera okända variabler.
Vi kommer att anta att eftersom vi alltid kan uppnå detta genom att ordna om systemets ekvationer. Låt oss eliminera den okända variabeln x 1 från alla ekvationer i systemet, börja med den andra. För att göra detta lägger vi till den första ekvationen i systemet, multiplicerad med , till den tredje ekvationen adderar vi den första, multiplicerad med , och så vidare, till den n:te ekvationen adderar vi den första, multiplicerad med . Ekvationssystemet efter sådana transformationer kommer att ta formen 
var och  .
.
Vi skulle ha kommit fram till samma resultat om vi hade uttryckt x 1 i termer av andra okända variabler i systemets första ekvation och substituerat det resulterande uttrycket i alla andra ekvationer. Variabeln x 1 exkluderas alltså från alla ekvationer, med början från den andra.
Därefter fortsätter vi på ett liknande sätt, men bara med en del av det resulterande systemet, som är markerat i figuren 
För att göra detta, till den tredje ekvationen i systemet lägger vi till den andra, multiplicerat med , till den fjärde ekvationen adderar vi den andra, multiplicerat med , och så vidare, till den n:te ekvationen adderar vi den andra, multiplicerat med . Ekvationssystemet efter sådana transformationer kommer att ta formen 
var och  . Variabeln x 2 exkluderas alltså från alla ekvationer, med början från den tredje.
. Variabeln x 2 exkluderas alltså från alla ekvationer, med början från den tredje.
Därefter fortsätter vi med att eliminera det okända x 3, medan vi agerar på liknande sätt med den del av systemet som är markerad i figuren 
Så vi fortsätter den direkta utvecklingen av den Gaussiska metoden tills systemet tar formen 
Från detta ögonblick börjar vi baksidan av Gaussmetoden: vi beräknar x n från den sista ekvationen som , med hjälp av det erhållna värdet på x n hittar vi x n-1 från den näst sista ekvationen, och så vidare, vi hittar x 1 från den första ekvationen .
Exempel.
Lös system av linjära ekvationer Gauss metod.
Lösning.
Låt oss exkludera den okända variabeln x 1 från systemets andra och tredje ekvationer. För att göra detta lägger vi till båda sidor av den andra och tredje ekvationen motsvarande delar av den första ekvationen, multiplicerat med respektive med: 
Nu eliminerar vi x 2 från den tredje ekvationen genom att lägga till dess vänstra och höger sida vänster och höger sida av den andra ekvationen, multiplicerat med: 
Detta avslutar det framåtgående slaget av Gauss-metoden, vi börjar det omvända slaget.
Från den sista ekvationen i det resulterande ekvationssystemet finner vi x 3: 
Från den andra ekvationen får vi .
Från den första ekvationen hittar vi den kvarvarande okända variabeln och fullföljer därmed motsatsen till Gaussmetoden.
Svar:
X 1 = 4, x 2 = 0, x 3 = -1.
Lösa system av linjära algebraiska ekvationer av allmän form.
I allmänhet sammanfaller inte antalet ekvationer i systemet p med antalet okända variabler n:
Sådana SLAE:er kanske inte har några lösningar, har en enda lösning eller har oändligt många lösningar. Detta påstående gäller även ekvationssystem vars huvudmatris är kvadratisk och singular.
Kronecker-Capelli-satsen.
Innan man hittar en lösning på ett system av linjära ekvationer är det nödvändigt att fastställa dess kompatibilitet. Svaret på frågan när SLAE är kompatibelt och när det är inkonsekvent ges av Kronecker-Capelli-satsen:
För att ett ekvationssystem med n okända (p kan vara lika med n) ska vara konsekvent, är det nödvändigt och tillräckligt att rangordningen för systemets huvudmatris är lika med rangordningen för den utökade matrisen, dvs. , Rank(A)=Rank(T).
Låt oss som ett exempel betrakta tillämpningen av Kronecker-Capelli-satsen för att bestämma kompatibiliteten för ett system av linjära ekvationer.
Exempel.
Ta reda på om systemet med linjära ekvationer har  lösningar.
lösningar.
Lösning.
 . Låt oss använda metoden att gränsa till minderåriga. Mindre av andra ordningen
. Låt oss använda metoden att gränsa till minderåriga. Mindre av andra ordningen  skiljer sig från noll. Låt oss titta på de minderåriga av tredje ordningen som gränsar till det:
skiljer sig från noll. Låt oss titta på de minderåriga av tredje ordningen som gränsar till det: 
Eftersom alla angränsande minderåriga av tredje ordningen är lika med noll, är huvudmatrisens rangordning lika med två.
I sin tur rangen för den utökade matrisen  är lika med tre, eftersom minor är av tredje ordningen
är lika med tre, eftersom minor är av tredje ordningen 
skiljer sig från noll.
Således, Rang(A), därför, med hjälp av Kronecker-Capelli-satsen, kan vi dra slutsatsen att det ursprungliga systemet med linjära ekvationer är inkonsekvent.
Svar:
Systemet har inga lösningar.
Så vi har lärt oss att fastställa inkonsekvensen i ett system med hjälp av Kronecker-Capelli-satsen.
Men hur hittar man en lösning på en SLAE om dess kompatibilitet är etablerad?
För att göra detta behöver vi begreppet basmoll av en matris och en sats om rangordningen för en matris.
Mindre högsta ordningen matris A, som skiljer sig från noll, kallas grundläggande.
Av definitionen av en basisminor följer att dess ordning är lika med matrisens rangordning. För en matris A som inte är noll kan det finnas flera basismolorer, det finns alltid en basismoll.
Tänk till exempel på matrisen  .
.
Alla tredje ordningens mindre i denna matris är lika med noll, eftersom elementen i den tredje raden i denna matris är summan av motsvarande element i den första och andra raden.
Följande andra ordningens minderåriga är grundläggande, eftersom de inte är noll 
Minderåriga  är inte grundläggande, eftersom de är lika med noll.
är inte grundläggande, eftersom de är lika med noll.
Matrix rangsats.
Om rangordningen för en matris av ordningen p till n är lika med r, så uttrycks alla rad- (och kolumnelement) i matrisen som inte utgör den valda grundmolllinjen linjärt i termer av motsvarande rad- (och kolumnelement) som bildar grunden mindre.
Vad säger matrisrangsatsen oss?
Om vi, enligt Kronecker-Capelli-satsen, har fastställt systemets kompatibilitet, väljer vi valfri basmoll av systemets huvudmatris (dess ordning är lika med r), och utesluter alla ekvationer som gör det från systemet. inte utgöra den valda basen minor. Den SLAE som erhålls på detta sätt kommer att vara ekvivalent med den ursprungliga, eftersom de kasserade ekvationerna fortfarande är redundanta (enligt matrisrangsatsen är de en linjär kombination av de återstående ekvationerna).
Som ett resultat, efter att ha förkastat onödiga ekvationer i systemet, är två fall möjliga.
Om antalet ekvationer r i det resulterande systemet är lika med antalet okända variabler, kommer det att vara definitivt och den enda lösningen kan hittas med Cramermetoden, matrismetoden eller Gaussmetoden.
Exempel.
 .
.
Lösning.
Rang för systemets huvudmatris  är lika med två, eftersom moll är av andra ordningen
är lika med två, eftersom moll är av andra ordningen  skiljer sig från noll. Utökad matrisrankning
skiljer sig från noll. Utökad matrisrankning  är också lika med två, eftersom den enda tredje ordningens moll är noll
är också lika med två, eftersom den enda tredje ordningens moll är noll 
och den andra ordningens moll som betraktas ovan skiljer sig från noll. Baserat på Kronecker-Capelli-satsen kan vi hävda kompatibiliteten för det ursprungliga systemet med linjära ekvationer, eftersom Rank(A)=Rank(T)=2.
Som grund mindre tar vi . Den bildas av koefficienterna för de första och andra ekvationerna: 
Systemets tredje ekvation deltar inte i bildandet av grundminor, så vi utesluter den från systemet baserat på satsen om matrisens rang: 
Så här fick vi fram ett elementärt system av linjära algebraiska ekvationer. Låt oss lösa det med Cramers metod: 
Svar:
x 1 = 1, x 2 = 2.
Om antalet ekvationer r i den resulterande SLAE är mindre än antalet okända variabler n, så lämnar vi på vänster sida av ekvationerna termerna som utgör basen minor, och vi överför de återstående termerna till de högra sidorna av ekvationerna systemets ekvationer med motsatt tecken.
De okända variablerna (r av dem) som finns kvar på vänster sida av ekvationerna kallas huvud.
Okända variabler (det finns n - r bitar) som finns på höger sida kallas fri.
Nu tror vi att fria okända variabler kan ta godtyckliga värden, medan de största okända variablerna kommer att uttryckas genom fria okända variabler på ett unikt sätt. Deras uttryck kan hittas genom att lösa den resulterande SLAE med Cramer-metoden, matrismetoden eller Gauss-metoden.
Låt oss titta på det med ett exempel.
Exempel.
Lös ett system av linjära algebraiska ekvationer  .
.
Lösning.
Låt oss hitta rangordningen för systemets huvudmatris  genom metoden att gränsa till minderåriga. Låt oss ta en 1 1 = 1 som en moll som inte är noll av första ordningen. Låt oss börja söka efter en moll som inte är noll av andra ordningen som gränsar till denna moll:
genom metoden att gränsa till minderåriga. Låt oss ta en 1 1 = 1 som en moll som inte är noll av första ordningen. Låt oss börja söka efter en moll som inte är noll av andra ordningen som gränsar till denna moll: 
Så här hittade vi en moll som inte är noll av andra ordningen. Låt oss börja söka efter en moll som inte är noll av tredje ordningen: 
Således är rangen på huvudmatrisen tre. Rangen på den utökade matrisen är också lika med tre, det vill säga systemet är konsekvent.
Vi tar den funna icke-noll-moll av tredje ordningen som grund ett.
För tydlighetens skull visar vi de element som utgör grundminor: 
Vi lämnar termerna som är involverade i basmoll på vänster sida av systemekvationerna och överför resten med motsatta tecken till höger sida: 
Låt oss ge de fria okända variablerna x 2 och x 5 godtyckliga värden, det vill säga vi accepterar ![]() , där finns godtyckliga siffror. I det här fallet kommer SLAE att ta formen
, där finns godtyckliga siffror. I det här fallet kommer SLAE att ta formen 
Låt oss lösa det resulterande elementära systemet av linjära algebraiska ekvationer med Cramers metod: 
Därav, .
I ditt svar, glöm inte att ange fria okända variabler.
Svar:
Var finns godtyckliga siffror.
Sammanfatta.
För att lösa ett system av allmänna linjära algebraiska ekvationer, bestämmer vi först dess kompatibilitet med hjälp av Kronecker-Capelli-satsen. Om rankningen av huvudmatrisen inte är lika med rankningen av den utökade matrisen, drar vi slutsatsen att systemet är inkompatibelt.
Om rankningen av huvudmatrisen är lika med rankningen av den utökade matrisen, väljer vi en basisminor och förkastar systemets ekvationer som inte deltar i bildandet av den valda basminoren.
Om ordningen för basminor är lika med antalet okända variabler, har SLAE en unik lösning, som kan hittas med vilken metod som helst som vi känner till.
Om ordningen för basminor är mindre än antalet okända variabler, lämnar vi på vänster sida av systemekvationerna termerna med de huvudsakliga okända variablerna, överför de återstående termerna till höger sida och ger godtyckliga värden till de fria okända variablerna. Från det resulterande systemet av linjära ekvationer finner vi de viktigaste okända variabler efter metod Cramer, matrismetod eller Gaussisk metod.
Gauss metod för att lösa system av linjära algebraiska ekvationer av allmän form.
Gaussmetoden kan användas för att lösa system av linjära algebraiska ekvationer av vilket slag som helst utan att först testa dem för konsistens. Processen med sekventiell eliminering av okända variabler gör det möjligt att dra en slutsats om både SLAE:s kompatibilitet och inkompatibilitet, och om det finns en lösning gör det det möjligt att hitta den.
Ur beräkningssynpunkt är den Gaussiska metoden att föredra.
Se upp detaljerad beskrivning och analyserade exempel i artikeln Gauss-metoden för att lösa system av linjära algebraiska ekvationer av allmän form.
Att skriva en generell lösning till homogena och inhomogena linjära algebraiska system med hjälp av vektorer för det fundamentala lösningssystemet.
I det här avsnittet kommer vi att prata om samtidiga homogena och inhomogena system av linjära algebraiska ekvationer som har ett oändligt antal lösningar.
Låt oss först ta itu med homogena system.
Grundläggande system av lösningar homogent system av p linjära algebraiska ekvationer med n okända variabler är en samling (n – r) linjärt oberoende lösningar av detta system, där r är ordningen för basmoll i systemets huvudmatris.
Om vi betecknar linjärt oberoende lösningar av en homogen SLAE som X (1) , X (2) , …, X (n-r) (X (1) , X (2) , …, X (n-r) är kolumnära matriser med dimension n med 1) , då representeras den allmänna lösningen av detta homogena system som en linjär kombination av vektorer av det fundamentala systemet av lösningar med godtyckliga konstanta koefficienter Ci, C2, ..., C (n-r), dvs.
Vad betyder termen generell lösning av ett homogent system av linjära algebraiska ekvationer (oroslau)?
Innebörden är enkel: formeln anger allt möjliga lösningar den ursprungliga SLAE, med andra ord, med valfri uppsättning värden av godtyckliga konstanter C 1, C 2, ..., C (n-r), enligt formeln kommer vi att få en av lösningarna till den ursprungliga homogena SLAE.
Således, om vi hittar ett grundläggande system av lösningar, kan vi definiera alla lösningar av denna homogena SLAE som .
Låt oss visa processen att konstruera ett grundläggande system av lösningar för en homogen SLAE.
Vi väljer basmoll för det ursprungliga systemet med linjära ekvationer, utesluter alla andra ekvationer från systemet och överför alla termer som innehåller fria okända variabler till högersidan av systemekvationerna med motsatta tecken. Låt oss ge de fria okända variablerna värdena 1,0,0,...,0 och beräkna de viktigaste okända genom att lösa det resulterande elementära systemet av linjära ekvationer på något sätt, till exempel med Cramer-metoden. Detta kommer att resultera i X (1) - den första lösningen av det grundläggande systemet. Om vi ger de fria okända värdena 0,1,0,0,...,0 och beräknar de viktigaste okända, får vi X (2) . Och så vidare. Om vi tilldelar värdena 0.0,…,0.1 till de fria okända variablerna och beräknar de viktigaste okända, får vi X (n-r) . På detta sätt kommer ett grundläggande system av lösningar till en homogen SLAE att konstrueras och dess allmänna lösning kan skrivas i formen .
För inhomogena system av linjära algebraiska ekvationer representeras den allmänna lösningen i formen , där är den allmänna lösningen av motsvarande homogena system, och är den särskilda lösningen av den ursprungliga inhomogena SLAE, som vi får genom att ge de fria okända värdena 0,0,...,0 och beräkna värdena för de viktigaste okända.
Låt oss titta på exempel.
Exempel.
Hitta det grundläggande lösningssystemet och den allmänna lösningen av ett homogent system av linjära algebraiska ekvationer  .
.
Lösning.
Rangen för huvudmatrisen för homogena system av linjära ekvationer är alltid lika med rangordningen för den utökade matrisen. Låt oss hitta rangordningen för huvudmatrisen med hjälp av metoden att gränsa till minderåriga. Som en moll som inte är noll av första ordningen tar vi elementet a 1 1 = 9 i systemets huvudmatris. Låt oss hitta den gränsande moll som inte är noll av andra ordningen: 
En mindre av den andra ordningen, som skiljer sig från noll, har hittats. Låt oss gå igenom de minderåriga av tredje ordningen som gränsar till det på jakt efter en icke-noll: 
Alla gränsande minderåriga av tredje ordningen är lika med noll, därför är rangordningen för huvudmatrisen och den utökade matrisen lika med två. Låt oss ta . För tydlighetens skull, låt oss notera de delar av systemet som bildar det: 
Den tredje ekvationen av den ursprungliga SLAE deltar inte i bildandet av grundminor, därför kan den uteslutas: 
Vi lämnar termerna som innehåller de viktigaste okända på de högra sidorna av ekvationerna och överför termerna med fria okända till höger:
Låt oss konstruera ett grundläggande system av lösningar till det ursprungliga homogena systemet av linjära ekvationer. Det grundläggande lösningssystemet för denna SLAE består av två lösningar, eftersom den ursprungliga SLAE innehåller fyra okända variabler, och ordningen för dess basisminor är lika med två. För att hitta X (1) ger vi de fria okända variablerna värdena x 2 = 1, x 4 = 0, sedan hittar vi de viktigaste okända från ekvationssystemet  .
.
Termen "system" används inom olika vetenskaper. Respektive, olika situationer Olika definitioner av systemet används: från filosofiskt till formellt. För kursens syfte är följande definition bäst lämpad: ett system är en uppsättning element som förenas av kopplingar och fungerar tillsammans för att uppnå ett mål.
System kännetecknas av ett antal egenskaper, varav de viktigaste är indelade i tre grupper: statisk, dynamisk och syntetisk.
1.1 Systemens statiska egenskaper
Statisk egenskaper är egenskaperna hos ett visst tillstånd i systemet. Detta är vad systemet har vid varje given tidpunkt.Integritet. Varje system framstår som något enhetligt, helt, separat, annorlunda från allt annat. Denna egenskap kallas systemintegritet. Det låter dig dela upp hela världen i två delar: systemet och miljön.
Öppenhet. Det isolerade systemet, skilt från allt annat, är inte isolerat från omgivningen. Tvärtom är de sammankopplade och utbyter olika typer av resurser (materia, energi, information etc.). Denna funktion betecknas med termen "öppenhet".
Kopplingarna mellan systemet och miljön är riktade: på vissa sätt påverkar miljön systemet (systemingångar), i andra påverkar systemet miljön, gör något i miljön och utmatar något till miljön (systemutgångar) . Beskrivningen av ingångarna och utgångarna för ett system kallas en svart låda-modell. Denna modell saknar information om interna funktioner system. Trots sin uppenbara enkelhet är en sådan modell ofta ganska tillräcklig för att arbeta med systemet.
I många fall, när du hanterar utrustning eller människor, tillåter information endast om systemets ingångar och utgångar dig att framgångsrikt uppnå målet. Men för detta måste modellen uppfylla vissa krav. Användaren kan till exempel uppleva svårigheter om han inte vet att på vissa TV-modeller måste strömbrytaren dras ut istället för att tryckas ned. Därför, för framgångsrik förvaltning, måste modellen innehålla all information som behövs för att uppnå målet. När man försöker tillgodose detta krav kan fyra typer av fel uppstå, vilka härrör från det faktum att modellen alltid innehåller ett ändligt antal anslutningar, medan antalet anslutningar i ett verkligt system är obegränsat.
Ett fel av den första typen uppstår när en subjekt av misstag ser en relation som signifikant och bestämmer sig för att inkludera den i modellen. Detta leder till uppkomsten av extra, onödiga element i modellen. Ett fel av den andra typen, tvärtom, görs när ett beslut fattas om att utesluta en förmodat obetydlig koppling från modellen, utan vilken det faktiskt är svårt eller till och med omöjligt att uppnå målet.
Svaret på frågan om vilket fel som är värst beror på i vilket sammanhang det ställs. Det är tydligt att användning av en modell som innehåller ett fel oundvikligen leder till förluster. Förluster kan vara små, acceptabla, oacceptabla eller oacceptabla. Skadan som orsakas av ett typ 1-fel beror på att informationen den innehåller är överflödig. När du arbetar med en sådan modell kommer du att behöva lägga resurser på att registrera och bearbeta onödig information, till exempel att slösa datorminne och bearbetningstid på den. Detta kanske inte påverkar kvaliteten på lösningen, men det kommer säkert att påverka kostnaden och aktualiteten. Förluster på grund av ett fel av den andra typen är skada på grund av att det inte finns tillräckligt med information för att fullt ut uppnå målet, målet kan inte uppnås fullt ut.
Nu står det klart att det värsta misstaget är det där förlusterna är större, och det beror på specifika omständigheter. Till exempel, om tid är en kritisk faktor, så blir ett fel av den första typen mycket farligare än ett fel av den andra typen: ett beslut som fattas i tid, även om det inte är det bästa, är att föredra framför ett optimalt, men sent. .
Ett fel av det tredje slaget anses vara konsekvenserna av okunskap. För att kunna bedöma betydelsen av ett visst samband behöver man veta att det överhuvudtaget finns. Om detta inte är känt är frågan om att inkludera anslutningen i modellen inte alls värt det. Om en sådan koppling är obetydlig, kommer i praktiken dess närvaro i verkligheten och frånvaron i modellen att vara omärkbar. Om anslutningen är betydande, kommer svårigheter att uppstå liknande de med ett typ II-fel. Skillnaden är att ett typ 3-fel är svårare att rätta till: detta kräver att man skaffar sig ny kunskap.
Ett fel av det fjärde slaget uppstår när en känd väsentlig anslutning felaktigt hänförs till antalet ingångar eller utgångar i systemet. Till exempel är det väl etablerat att i England på 1800-talet var hälsan för män som bar hattar betydligt bättre än för män som bar kepsar. Av detta följer knappast att typen av huvudbonad kan betraktas som en ingång för ett system för att förutsäga hälsotillstånd.
Systemens inre heterogenitet, delarnas distinkthet. Om du tittar in i den "svarta lådan" visar det sig att systemet är heterogent, inte monolitiskt. Man kan upptäcka att olika kvaliteter skiljer sig åt i olika delar av systemet. Beskrivningen av systemets interna heterogenitet handlar om att isolera relativt homogena områden och dra gränser mellan dem. Så ser begreppet delar av systemet ut. Vid närmare granskning visar det sig att de identifierade stora delarna också är heterogena, vilket kräver identifiering av ännu mindre delar. Resultatet är en hierarkisk beskrivning av delarna i systemet, som kallas en sammansättningsmodell.
Information om systemets sammansättning kan användas för att arbeta med systemet. Målen för interaktion med systemet kan vara olika, och därför kan även sammansättningsmodellerna för samma system skilja sig åt. Vid första anblicken är det inte svårt att särskilja delarna av systemet; de "fångar ögat." I vissa system uppstår delar godtyckligt, i processen med naturlig tillväxt och utveckling (organismer, samhällen, etc.). Konstgjorda system är medvetet sammansatta av tidigare kända delar (mekanismer, byggnader etc.). Det finns också blandade typer av system, som naturreservat och jordbrukssystem. Däremot består högskolan ur rektors, studentens, revisorns och verksamhetschefens synvinkel av olika delar. Ett flygplan består av olika delar ur pilotens, flygvärdinnans och passagerarens synvinkel. Svårigheterna med att skapa en kompositionsmodell kan representeras på tre sätt.
För det första kan helheten delas upp i delar på olika sätt. I det här fallet bestäms uppdelningsmetoden av målet. Till exempel presenteras en bils sammansättning annorlunda för nybörjare bilentusiaster, framtida yrkesförare, mekaniker som förbereder sig för att arbeta i ett bilservicecenter och säljare i bilhandlare. Det är naturligt att fråga sig om delar av systemet "verkligen" existerar? Svaret finns i formuleringen av egenskapen i fråga: vi talar om särskiljbarhet och inte om separerbarhet av delar. Du kan skilja på de delar av systemet som behövs för att uppnå målet, men du kan inte skilja dem åt.
För det andra beror antalet delar i kompositionsmodellen också på vid vilken nivå fragmenteringen av systemet stoppas. Delarna på terminalgrenarna i det resulterande hierarkiska trädet kallas element. Under olika omständigheter avslutas nedbrytningen på olika nivåer. Till exempel, när du beskriver kommande arbete, är det nödvändigt att ge en erfaren arbetare och en nybörjare instruktioner med varierande detaljeringsgrad. Sammansättningsmodellen beror alltså på vad som anses vara elementärt. Det finns fall då ett element har en naturlig, absolut karaktär (cell, individ, fonem, elektron).
För det tredje är vilket system som helst en del större system och ibland flera system samtidigt. Ett sådant metasystem kan också delas in i delsystem på olika sätt. Detta innebär att systemets yttre gräns är relativ, villkorad. Systemets gränser bestäms med hänsyn till målen för ämnet som ska använda systemmodellen.
Strukturera. Egenskapen med struktureradhet är att delarna av systemet inte är isolerade, inte oberoende av varandra; de är sammankopplade och interagerar med varandra. Dessutom beror systemets egenskaper väsentligt på hur exakt dess delar interagerar. Därför är information om anslutningarna av systemelement så viktig. Listan över väsentliga kopplingar mellan systemelement kallas en systemstrukturmodell. Tilldelningen av vilket system som helst med en viss struktur kallas strukturering.
Konceptet med strukturering fördjupar idén om systemets integritet ytterligare: anslutningar håller liksom delarna ihop och håller ihop dem som en helhet. Integritet, som tidigare noterats som en extern egenskap, får en stödjande förklaring inifrån systemet - genom struktur.
När man bygger en modell förekommer även strukturer vissa svårigheter. Den första av dessa beror på att strukturmodellen bestäms efter att sammansättningsmodellen har valts, och beror på exakt vad systemets sammansättning är. Men även med en fast sammansättning är strukturmodellen variabel. Detta beror på möjligheten att definiera betydelsen av samband på olika sätt. Till exempel rekommenderas en modern chef, tillsammans med den formella strukturen i sin organisation, att ta hänsyn till förekomsten av informella relationer mellan anställda, vilket också påverkar organisationens funktion. Den andra svårigheten härrör från det faktum att varje element i systemet i sin tur är en "liten svart låda". Så alla fyra typer av fel är möjliga när man definierar in- och utdata för varje element som ingår i strukturmodellen.
1.2 DYNAMISKA EGENSKAPER HOS SYSTEM
Om vi betraktar systemets tillstånd vid en ny tidpunkt kan vi återigen upptäcka alla fyra statiska egenskaper. Men om du lägger "fotografier" av systemet vid olika tidpunkter ovanpå varandra, kommer du att upptäcka att de skiljer sig i detalj: under tiden mellan de två observationsögonblicken inträffade vissa förändringar i systemet och dess miljö. Sådana förändringar kan vara viktiga när man arbetar med systemet och måste därför återspeglas i systembeskrivningar och beaktas när man arbetar med det. Funktionerna för förändringar över tid i och utanför systemet kallas systemets dynamiska egenskaper. Det brukar vara fyra olika dynamiska egenskaper system.Funktionalitet. Processer Y(t) som förekommer vid systemets utgångar betraktas som dess funktioner. Ett systems funktioner är dess beteende i den yttre miljön, resultaten av dess aktiviteter och de produkter som produceras av systemet.
Från mångfalden av utgångar följer en mångfald funktioner, som var och en kan användas av någon och för något. Därför kan samma system tjäna olika syften. En person som använder ett system för sina egna syften kommer naturligtvis att utvärdera dess funktioner och organisera dem i förhållande till sina behov. Så framstår begreppen huvud, sekundär, neutral, oönskad, överflödig funktion etc.
Stimulans. Vissa processer förekommer också vid systemingångarna X(t), som påverkar systemet och förvandlas efter en serie transformationer i systemet till Y(t). Effekter X(t) kallas stimuli, och själva känsligheten hos vilket system som helst för yttre påverkan och förändringen i dess beteende under dessa influenser kallas stimulabilitet.
Variabilitet i systemet över tid. I vilket system som helst sker förändringar som måste beaktas. När det gäller systemmodellen kan vi säga att värdena för interna variabler (parametrar) kan ändras Z(t), systemets sammansättning och struktur och eventuella kombinationer därav. Arten av dessa förändringar kan också vara olika. Därför kan ytterligare klassificeringar av ändringar övervägas.
Den mest uppenbara klassificeringen är genom förändringshastigheten (långsam, snabb. Förändringshastigheten mäts i förhållande till vilken hastighet som helst som standard. Det är möjligt att införa ett stort antal hastighetsgrader. Det är också möjligt att klassificera trender i förändringar i systemet vad gäller dess struktur och sammansättning.
Vi kan prata om förändringar som inte påverkar systemets struktur: vissa element ersätts av andra som är likvärdiga; alternativ Z(t) kan ändras utan att ändra strukturen. Denna typ av systemdynamik kallas dess funktion. Förändringar kan vara kvantitativa till sin natur: systemets sammansättning ökar, och även om dess struktur automatiskt ändras, påverkar detta inte systemets egenskaper förrän en viss punkt (till exempel utbyggnaden av en deponi). Sådana förändringar kallas systemtillväxt. Med kvalitativa förändringar i systemet förändras dess väsentliga egenskaper. Om sådana förändringar går i positiv riktning kallas de utveckling. Med samma resurser uppnår ett utvecklat system bättre resultat, och nya positiva egenskaper (funktioner) kan dyka upp. Detta beror på en ökning av nivån på konsekvens och organisation av systemet.
Tillväxt sker främst på grund av förbrukning av materiella resurser, utveckling - på grund av assimilering och användning av information. Tillväxt och utveckling kan ske samtidigt, men de är inte nödvändigtvis relaterade. Tillväxten är alltid begränsad (på grund av begränsade materiella resurser), och utveckling utifrån är inte begränsad, eftersom information om den yttre miljön är outtömlig. Utveckling är resultatet av träning, men träning kan inte genomföras i stället för eleven. Därför finns det en intern begränsning av utvecklingen. Om systemet ”inte vill” lära sig kan och kommer det inte att utvecklas.
Utöver tillväxt- och utvecklingsprocesserna kan även omvända processer förekomma i systemet. Förändringar som är motsatta tillväxt kallas nedgång, sammandragning, minskning. En förändring som är motsatt utveckling kallas för nedbrytning, förlust eller försvagning av nyttiga egenskaper.
De övervägda förändringarna är monotona, det vill säga de är riktade "i en riktning". Uppenbarligen kan monotona förändringar inte vara för evigt. I varje systems historia kan man urskilja perioder av nedgång och uppgång, stabilitet och instabilitet, vars sekvens bildar en individ livscykel system.
Du kan använda andra klassificeringar av processer som förekommer i systemet: enligt förutsägbarhet delas processer in i slumpmässiga och deterministiska; Beroende på typen av tidsberoende delas processer in i monoton, periodisk, harmonisk, pulsad, etc.
Tillvaro i en föränderlig miljö. Inte bara detta system förändras, utan också alla andra. För det aktuella systemet ser detta ut som en kontinuerlig förändring i miljön. Denna omständighet har många konsekvenser för själva systemet, som måste anpassa sig till nya förhållanden för att inte gå under. När man överväger ett specifikt system ägnas vanligtvis uppmärksamhet åt egenskaperna hos en speciell reaktion i systemet, till exempel reaktionshastigheten. Om vi överväger system som lagrar information (böcker, magnetiska media), bör reaktionshastigheten på förändringar i den yttre miljön vara minimal för att säkerställa bevarandet av information. Å andra sidan måste kontrollsystemets svarshastighet vara många gånger högre än förändringshastigheten i omgivningen, eftersom systemet måste välja en kontrollåtgärd redan innan omgivningens tillstånd ändras oåterkalleligt.
1.3 SYNTETISKA EGENSKAPER HOS SYSTEM
Syntetiska egenskaper inkluderar generaliserande, integrala, kollektiva egenskaper som beskriver systemets interaktion med omgivningen och tar hänsyn till integritet i den mest allmänna meningen.Uppkomst. Kombinationen av element till ett system leder till uppkomsten av kvalitativt nya egenskaper som inte härrör från delarnas egenskaper, som bara är inneboende i själva systemet och existerar bara så länge som systemet är en helhet. Sådana egenskaper hos systemet kallas
emergent (från engelskan "to arise").
Exempel på emergenta egenskaper finns inom olika områden. Till exempel kan ingen av planets delar flyga, men planet flyger ändå. Vattnets egenskaper, av vilka många inte är helt klarlagda, följer inte av egenskaperna hos väte och syre.
Låt det finnas två svarta rutor, som var och en har en ingång, en utgång och utför en operation - att lägga till en till numret vid ingången. När du ansluter sådana element enligt diagrammet som visas i figuren får vi ett system utan ingångar, men med två utgångar. Vid varje driftcykel kommer systemet att utfärdas större antal, i det här fallet kommer endast jämna nummer att visas vid en ingång, och endast udda nummer vid den andra.
 |
|
| A | b |
| Fig.1.1. Anslutning av systemelement: a) system med två utgångar; b) parallellkoppling av element |
|
De framväxande egenskaperna hos ett system bestäms av dess struktur. Det betyder att med olika kombinationer av grundämnen kommer olika emergenta egenskaper att uppstå. Till exempel, om du kopplar element parallellt, då funktionellt nytt system kommer inte att skilja sig från ett element. Uppkomsten kommer att manifestera sig i att öka systemets tillförlitlighet på grund av parallellkopplingen av två identiska element - det vill säga på grund av redundans.
Det är värt att notera ett viktigt fall när elementen i systemet har alla dess egenskaper. Denna situation är typisk för fraktalkonstruktionen av ett system. Samtidigt är principerna för att strukturera delarna desamma som för systemet som helhet. Ett exempel på ett fraktalt system är en organisation där ledningen är identiskt strukturerad på alla nivåer i hierarkin.
Oskiljaktig i delar. Denna egenskap är i själva verket en följd av uppkomsten. Det framhålls särskilt eftersom dess praktiska betydelse är stor, och underskattning är mycket vanligt.
När en del tas bort från systemet händer två saker: viktiga händelser. För det första förändrar detta systemets sammansättning och därmed dess struktur. Detta blir ett annat system med olika egenskaper. För det andra kommer ett element som tas bort från systemet att bete sig annorlunda på grund av att dess miljö kommer att förändras. Allt detta är att säga att försiktighet bör iakttas när man överväger ett element isolerat från resten av systemet.
Inherens. Ju mer integrerat systemet är (från engelska inneboende - "att vara del av något"), desto bättre är det koordinerat, anpassat till miljö, är kompatibel med det. Graden av inneboende varierar och kan förändras. Lämpligheten att betrakta inherens som en av systemets egenskaper beror på att graden och kvaliteten på systemets implementering av den valda funktionen beror på det. I naturliga system ökar inherensen genom naturligt urval. I artificiella system bör inherens vara en särskild angelägenhet för designern.
I vissa fall säkerställs inherensen med hjälp av mellanliggande, mellanliggande system. Exempel inkluderar adaptrar för användning av främmande elektriska apparater i samband med uttag i sovjetisk stil; mellanprogram (som COM-tjänsten i Windows) som gör att två program från olika tillverkare kan kommunicera med varandra.
Ändamålsenlighet. I system skapade av människan är underordnandet av både struktur och sammansättning för att uppnå det uppsatta målet så uppenbart att det kan erkännas grundläggande egenskap något konstgjort system. Denna egenskap kallas ändamålsenlighet. Målet för vilket systemet skapas avgör vilken framväxande egenskap som säkerställer uppnåendet av målet, och detta i sin tur dikterar valet av systemets struktur och sammansättning. För att utvidga begreppet ändamålsenlighet till naturliga system är det nödvändigt att förtydliga begreppet syfte. Förtydligandet utförs med ett artificiellt system som exempel.
Historiken för alla artificiella system börjar vid någon tidpunkt 0, när det befintliga värdet på tillståndsvektorn Y 0 visar sig vara otillfredsställande, det vill säga en problematisk situation uppstår. Försökspersonen är missnöjd med detta tillstånd och vill ändra det. Låt honom vara nöjd med värdena för tillståndsvektorn Y*. Detta är den första definitionen av målet. Vidare upptäcks det att Y* inte existerar nu och inte kan, av ett antal skäl, uppnås inom en snar framtid. Det andra steget i att definiera ett mål är att erkänna det som ett önskat framtida tillstånd. Det står direkt klart att framtiden inte är begränsad. Det tredje steget i att klargöra begreppet mål är att uppskatta tiden T* när det önskade tillståndet Y* kan uppnås under givna förutsättningar. Nu blir målet tvådimensionellt, det är en punkt (T*, Y*) på grafen. Uppgiften är att flytta från punkt (0, Y 0) till punkt (T*, Y*). Men det visar sig att denna väg kan tas längs olika banor, och bara en av dem kan förverkligas. Låt valet falla på banan Y*( t). Således betyder målet nu inte bara sluttillståndet (T*, Y*), utan också hela banan Y*( t) ("mellanmål", "plan"). Så målet är de önskade framtida tillstånden Y*( t).
Efter tid T* blir tillstånd Y* verkligt. Därför blir det möjligt att definiera målet som ett framtida verkligt tillstånd. Detta gör det möjligt att säga att naturliga system också har egenskapen ändamålsenlighet, vilket gör att vi kan närma oss beskrivningen av system av vilken natur som helst från en enhetlig position. Den största skillnaden mellan naturliga och artificiella system är att naturliga system, som lyder naturens lagar, förverkligar objektiva mål och konstgjorda system skapas för att förverkliga subjektiva mål.
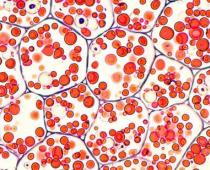
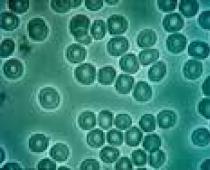
Mest gemensamt drag av något heterogent system - närvaron av två ( eller fler) faser som är separerade från varandra genom ett uttalat gränssnitt. Denna egenskap skiljer heterogena system från lösningar, som också består av flera komponenter som bildar en homogen blandning. Vi kommer att kalla en av faserna, kontinuerlig, dispersiv, och den andra, finfördelad och fördelad i den första, dispergerade fasen. Beroende på typen av dispersionsmedium särskiljs heterogena blandningar, vätska och gas. I tabell 5.1 visar klassificeringen av inhomogena system enligt typen av dispergerade och dispergerade faser.
Tabell 5.1
Klassificering av heterogena system
Klassificering och egenskaper hos heterogena system
Heterogena system Ett system anses vara ett system som består av två eller flera faser. Varje fas har sitt eget gränssnitt och kan separeras mekaniskt från den andra.
Ett heterogent system består av en inre (dispergerad) fas och en extern fas (dispergeringsmedium), i vilka partiklar av den dispergerade fasen finns. System där den yttre fasen är flytande kallas inhomogena vätskesystem, och om gaser kallas inhomogena gassystem . Heterogena system kallas heterogena och homogena - homogena. Ett homogent vätskesystem förstås som en ren vätska eller en lösning av några ämnen i den. Ett heterogent, eller heterogent, vätskesystem är en vätska i vilken det finns några olösta ämnen i form av små partiklar. Heterogena system kallas ofta dispergerade.
Följande typer av inhomogena system särskiljs: suspensioner, emulsioner, skum, damm, ångor, dimma.
Suspensionär ett system som består av en kontinuerlig flytande fas i vilken fasta partiklar är suspenderade. Till exempel såser med mjöl, stärkelsemjölk, melass med sockerkristaller.
Beroende på partikelstorleken delas suspensioner in i grova (partikelstorlek mer än 100 mikron), fina (0,1-100 mikron) och kolloidala lösningar innehållande fasta partiklar med en storlek av 0,1 mikron eller mindre.
Emulsionär ett system som består av en vätska och droppar av en annan vätska fördelade i den som inte har lösts upp i den första. Detta är till exempel mjölk, en blandning av vegetabilisk olja och vatten. Det finns gasemulsioner i vilka dispersionsmediet är flytande och den dispergerade fasen är gas.
Skumär ett system som består av en vätska och gasbubblor fördelade i den. Till exempel krämer och andra vispade produkter. Skum har liknande egenskaper som emulsioner.
Emulsioner och skum kännetecknas av möjligheten av övergång av den dispergerade fasen till ett dispersionsmedium och vice versa. Denna övergång, möjlig vid ett visst massförhållande av faser, kallas fasinversion eller helt enkelt inversion.
Aerosoler kallas ett dispergerat system med ett gasformigt dispersionsmedium och en fast eller flytande dispergerad fas, som består av partiklar från kvasimolekylära till mikroskopiska storlekar som har egenskapen att vara suspenderade under mer eller mindre lång tid. Detta koncept kombinerar damm, rök och dimma. Till exempel mjöldamm som bildas under spannmålsmalning, siktning och transport av mjöl; sockerdamm som bildas vid torkning av socker etc. Rök bildas när fast bränsle förbränns, dimma bildas när ånga kondenserar.
I aerosoler är dispersionsmediet gas eller luft, och den dispergerade fasen i damm och rök är fasta ämnen och i dimma är den flytande.
Damm och rök- system bestående av gas och fasta partiklar fördelade i dem med storlekar på 5-50 mikron respektive 0,3-5 mikron. Dimma är ett system som består av gas- och vätskedroppar på 0,3-3 mikron i storlek fördelade i det, bildade som ett resultat av kondensation.
En kvalitativ indikator som kännetecknar enhetligheten hos aerosolpartiklar i storlek är graden av spridning. En aerosol kallas monodispers när dess ingående partiklar är av samma storlek, och polydispers när den innehåller partiklar av olika storlekar. Monodispersa aerosoler finns praktiskt taget inte i naturen. Det finns bara ett fåtal aerosoler vars partikelstorlek endast närmar sig monodispersa system (svamphyfer, specialtillverkade dimmor etc.).
Dispers eller heterogen Beroende på antalet dispergerade faser kan systemen vara en- eller flerkomponents. Till exempel är mjölk ett multikomponentsystem (det har två dispergerade faser: fett och protein); såser (dispergerade faser är mjöl, fett, etc.).
Separationsmetoder heterogena system klassificeras beroende på storleken på suspenderade partiklar i den dispergerade fasen, skillnaden i densiteter för de dispergerade och kontinuerliga fasen, såväl som viskositeten hos den kontinuerliga fasen. Följande huvudsakliga separationsmetoder används: sedimentering, filtrering, centrifugering, våtseparering, elektrorening.
Nederbördär en separationsprocess där fasta eller flytande partiklar av en dispergerad fas suspenderade i en vätska eller gas separeras från den kontinuerliga fasen under påverkan av gravitation, centrifugalkrafter eller elektrostatiska krafter. Sedimentering genom gravitation kallas sedimentering.
Filtrering - process separation med användning av en porös skiljevägg som kan leda vätska eller gas och hålla kvar fasta partiklar suspenderade i mediet. Filtrering utförs under påverkan av tryckkrafter och används för en finare avskiljning av suspensioner och damm än vid sedimentering.
Centrifugering- processen att separera suspensioner och emulsioner under inverkan av centrifugalkraft.
Våtseparation- processen att fånga partiklar suspenderade i en gas med hjälp av en vätska.
Elektrorengöring- rening av gaser under påverkan av elektriska krafter.
Metoder för att separera flytande och inhomogena gassystem bygger på samma principer, men den utrustning som används har ett antal funktioner.
2.4.1. Definition. Låt oss ges ett inhomogent system av linjära ekvationer
Tänk på ett homogent system
vars matris av koefficienter sammanfaller med matrisen av koefficienter för systemet (2.4.1). Sedan anropas system (2.4.2). reducerat homogent system (2.4.1).
2.4.2. Sats. Den allmänna lösningen av ett inhomogent system är lika med summan av någon speciell lösning av det inhomogena systemet och den allmänna lösningen av det reducerade homogena systemet.
För att hitta en generell lösning på det inhomogena systemet (2.4.1) är det alltså tillräckligt:
1) Undersök det för kompatibilitet. Vid kompatibilitet:
2) Hitta den allmänna lösningen för det reducerade homogena systemet.
3) Hitta någon speciell lösning på den ursprungliga (inhomogena) lösningen.
4) Genom att lägga till den hittade specifika lösningen och den allmänna lösningen för den givna, hitta den allmänna lösningen för det ursprungliga systemet.
2.4.3. Träning. Undersök systemet för kompatibilitet och, i fallet med kompatibilitet, hitta dess generella lösning i form av summan av det särskilda och det allmänna givna.
Lösning. a) För att lösa problemet använder vi ovanstående schema:
1) Vi undersöker systemet för kompatibilitet (genom metoden att gränsa till minderåriga): Huvudmatrisens rang är 3 (se lösningen till övning 2.2.5, a), och moll som inte är noll i den maximala ordningen är sammansatt av element från 1:a, 2:a, 4:e raden och 1:a, 3:e, 4:e kolumnen. För att hitta rangordningen för den utökade matrisen, gränsar vi till den 3:e raden och 6:e kolumnen i den utökade matrisen: =0. Betyder att, rg A =rg=3, och systemet är konsekvent. I synnerhet är det likvärdigt med systemet
2) Låt oss hitta en generell lösning X 0 reducerat homogent system
X 0 ={(-2a - b ; a ; b ; b ; b ) | a , b Î R}
(se lösning till övning 2.2.5, a)).
3) Låt oss hitta någon speciell lösning x h för det ursprungliga systemet . För att göra detta, i system (2.4.3), motsvarande det ursprungliga, de fria okända x 2 och x Vi antar att 5 är lika med till exempel noll (detta är den mest bekväma informationen):
och lös det resulterande systemet: x 1 =- , x 3 =- , x 4 = -5. Således är (- ; 0; - ; -5; 0) ¾ en speciell lösning av systemet.
4) Hitta den allmänna lösningen X n för det ursprungliga systemet :
X n={x h }+X 0 ={(- ; 0; - ; -5; 0)} + {(-2a - b ; a ; b ; b ; b )}=
={(- -2a - b ; a ; - + b ; -5+b ; b )}.
Kommentar. Jämför svaret du fick med det andra svaret i exempel 1.2.1 c). För att få svaret i den första formen för 1.2.1 c) tas de grundläggande okända x 1 , x 3 , x 5 (den moll för vilken inte heller är lika med noll), och som fri ¾ x 2 och x 4 .
§3. Vissa applikationer.
3.1. På frågan om matrisekvationer. Vi påminner dig om det matrisekvation över fältet F är en ekvation där det okända är en matris över fältet F .
De enklaste matrisekvationerna är ekvationer av formen
YXA=B , XA =B (2.5.1)
Var A , B ¾ given (känd) matris över ett fält F , A X ¾ sådana matriser, vid utbyte av vilka ekvationer (2.5.1) förvandlas till sanna matrislikheter. Speciellt reduceras matrismetoden för vissa system till att lösa en matrisekvation.
I fallet när matriserna A i ekvationer (2.5.1) är icke-degenererade, de har lösningar, respektive X =A B Och X =B.A. .
I fallet när minst en av matriserna på vänster sida av ekvationerna (2.5.1) är singular, är denna metod inte längre lämplig, eftersom motsvarande inversa matris A existerar inte. I detta fall reduceras att hitta lösningar på ekvationer (2.5.1) till att lösa system.
Men låt oss först introducera några begrepp.
Låt oss kalla uppsättningen av alla lösningar i systemet allmänt beslut . Låt oss kalla en separat tagen lösning för ett obestämt system privat lösning .
3.1.1. Exempel. Lös matrisekvation över fält R.
A) X = ; b) X = ; V) X = .
Lösning. a) Eftersom =0, då formeln X =A B är inte lämplig för att lösa denna ekvation. Om i arbetet XA =B matris A har 2 rader, sedan matrisen X har 2 kolumner. Antal rader X måste matcha antalet rader B . Det är därför X har 2 rader. Således, X ¾ någon kvadratisk matris av andra ordningen: X = . Låt oss ersätta X i den ursprungliga ekvationen:
Multiplicerar vi matriserna på vänster sida av (2.5.2), kommer vi fram till likheten
Två matriser är lika om och endast om de har samma dimensioner och deras motsvarande element är lika. Därför är (2.5.3) ekvivalent med systemet
Detta system är likvärdigt med systemet
Löser vi det, till exempel med den Gaussiska metoden, kommer vi till en uppsättning lösningar (5-2 b , b , -2d , d ), Var b , d köra oberoende av varandra R. Således, X = .
b) Liknar a) vi har X = och.
Detta system är inkonsekvent (kolla in det!). Därför har denna matrisekvation inga lösningar.
c) Låt oss beteckna denna ekvation med YXA =B . Därför att A har 3 kolumner och B har 2 kolumner, alltså X ¾ någon matris med dimension 3´2: X = . Därför har vi följande kedja av ekvivalenser:
Vi löser det sista systemet med den Gaussiska metoden (vi utelämnar kommentarer)
Därmed kommer vi fram till systemet
vars lösning är (11+8 z , 14+10z , z , -49+8w , -58+10w ,w ) Var z , w köra oberoende av varandra R.
Svar: a) X = , b , d Î R.
b) Det finns inga lösningar.
V) X = z , w Î R.
3.2. På frågan om permuterbarhet av matriser. I allmänhet är produkten av matriser icke-kommuterbar, det vill säga om A Och B Så att AB Och B.A. definieras då, generellt sett, AB ¹ B.A. . Men ett exempel identitetsmatris E visar att pendlingsbarhet också är möjlig A.E. =E.A. för vilken matris som helst A , om bara A.E. Och E.A. var bestämda.
I det här avsnittet kommer vi att överväga problem med att hitta mängden av alla matriser som pendlar med en given. Således,
Okänd x 1 , y 2 och z 3 kan ta vilket värde som helst: x 1 =a , y 2 =b , z 3 =g . Sedan
Således, X = .
Svar. A) X d ¾ valfritt antal.
b) X ¾ uppsättning matriser av formen , där a , b Och g ¾ valfria nummer.
- I kontakt med 0
- Google+ 0
- OK 0
- Facebook 0