MÄÄRATLUS
jätkusuutlik tasakaal- see on tasakaal, kus tasakaalust välja võetud ja iseendale jäetud keha naaseb oma eelmisse asendisse.
See juhtub siis, kui keha kerge nihkega mis tahes suunas algasendist muutub kehale mõjuvate jõudude resultant nullist erinevaks ja on suunatud tasakaaluasendisse. Näiteks pall, mis asub sfäärilise õõnsuse põhjas (joonis 1a).
MÄÄRATLUS
Ebastabiilne tasakaal- see on tasakaal, kus tasakaaluasendist välja võetud ja iseendale jäetud keha kaldub tasakaaluasendist veelgi rohkem kõrvale.
Sel juhul on keha väikese nihkega tasakaaluasendist sellele rakendatavate jõudude resultant nullist erinev ja on suunatud tasakaaluasendist. Näiteks on kuul, mis asub kumera sfäärilise pinna ülaosas (joonis 1 b).
MÄÄRATLUS
Ükskõikne tasakaal- see on tasakaal, kus tasakaalust välja võetud ja iseendale jäetud keha ei muuda oma asendit (olekut).
Sel juhul jääb keha väikeste nihkumiste korral algsest asendist kehale rakendatavate jõudude resultant võrdseks nulliga. Näiteks tasasel pinnal lamav pall (joon. 1, c).
Joonis 1. Erinevad keha tasakaalu tüübid toel: a) stabiilne tasakaal; b) ebastabiilne tasakaal; c) ükskõikne tasakaal.
Kehade staatiline ja dünaamiline tasakaal
Kui jõudude toime tulemusena ei saa keha kiirendust, võib see olla puhkeasendis või liikuda ühtlaselt sirgjooneliselt. Seetõttu saame rääkida staatilisest ja dünaamilisest tasakaalust.
MÄÄRATLUS
Staatiline tasakaal- see on selline tasakaal, kui keha on rakendatud jõudude toimel puhkeasendis.
dünaamiline tasakaal- see on selline tasakaal, kui jõudude toimel keha oma liikumist ei muuda.
Staatilises tasakaalus on latern, mis on riputatud kaablitele, mis tahes ehituskonstruktsioonile. Dünaamilise tasakaalu näitena võime vaadelda ratast, mis hõõrdejõudude puudumisel veereb tasasel pinnal.
Sellest järeldub, et kui kõigi geomeetriline summa välised jõud kehale rakendatud on võrdne nulliga, siis keha on puhkeasendis või sooritab ühtlast sirgjoonelist liikumist. Sel juhul on kombeks öelda, et kehale rakendatavad jõud tasakaalustavad üksteist. Resultandi arvutamisel saab massikeskmele rakendada kõiki kehale mõjuvaid jõude.
Selleks, et mittepöörlev keha oleks tasakaalus, on vajalik, et kõigi kehale rakendatavate jõudude resultant oleks võrdne nulliga.
$(\overrightarrow(F))=(\overrightarrow(F_1))+(\overrightarrow(F_2))+...= 0$
Kui keha suudab pöörata ümber mingi telje, siis tema tasakaalu jaoks ei piisa sellest, et kõigi jõudude resultant on võrdne nulliga.
Jõu pöörlev toime ei sõltu ainult selle suurusest, vaid ka jõu toimejoone ja pöörlemistelje vahelisest kaugusest.
Pöörlemisteljelt jõu toimejoonele tõmmatud risti pikkust nimetatakse jõu haruks.
Jõumooduli $F$ ja käe d korrutist nimetatakse jõumomendiks M. Nende jõudude momente, mis kalduvad keha vastupäeva pöörama, loetakse positiivseks.
Momentide reegel: fikseeritud pöörlemisteljega keha on tasakaalus, kui kõigi kehale selle telje ümber mõjuvate jõudude momentide algebraline summa on null:
Üldjuhul, kui keha saab edasi liikuda ja pöörata, peavad tasakaalu saavutamiseks olema täidetud mõlemad tingimused: resultantjõud peab olema võrdne nulliga ja kõigi jõudude momentide summa peab olema võrdne nulliga. Mõlemad tingimused ei ole puhkamiseks piisavad.
Joonis 1. Ükskõikne tasakaal. Ratas veereb horisontaalsel pinnal. Tulemusjõud ja jõudude moment on võrdsed nulliga
Ükskõikse tasakaalu näide on horisontaalsel pinnal veerev ratas (joonis 1). Kui ratas mingil hetkel peatatakse, on see tasakaalus. Koos ükskõikse tasakaaluga mehaanikas eristatakse stabiilse ja ebastabiilse tasakaalu seisundeid.
Tasakaaluseisundit nimetatakse stabiilseks, kui keha väikeste kõrvalekallete korral sellest seisundist tekivad jõud või jõudude momendid, mis kipuvad keha tagasi viima tasakaaluolekusse.
Keha väikese kõrvalekaldega ebastabiilse tasakaalu seisundist tekivad jõud või jõumomendid, mis kipuvad keha tasakaaluasendist välja viima. Tasasel horisontaalsel pinnal lebav pall on ükskõikses tasakaalus.

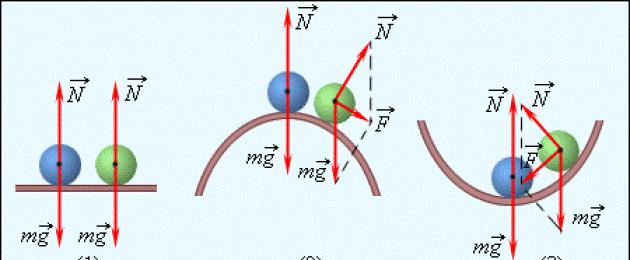
Joonis 2. Palli erinevad tasakaalutüübid toel. (1) -- ükskõikne tasakaal, (2) -- ebastabiilne tasakaal, (3) -- stabiilne tasakaal
Sfäärilise serva ülaosas asuv pall on näide ebastabiilsest tasakaalust. Lõpuks on sfäärilise õõnsuse põhjas olev pall stabiilses tasakaalus (joonis 2).
Fikseeritud pöörlemisteljega keha puhul on võimalikud kõik kolm tasakaaluliiki. Ükskõikne tasakaal tekib siis, kui pöörlemistelg läbib massikeskme. Stabiilses ja ebastabiilses tasakaalus on massikese vertikaalsel joonel, mis läbib pöörlemistelge. Sel juhul, kui massikese on pöörlemisteljest allpool, on tasakaaluseisund stabiilne. Kui massikese asub telje kohal, on tasakaaluolek ebastabiilne (joonis 3).

Joonis 3. O-teljele kinnitatud homogeense ringikujulise ketta stabiilne (1) ja ebastabiilne (2) tasakaal; punkt C on ketta massikese; $(\overrightarrow(F))_t\ $-- gravitatsioon; $(\overrightarrow(F))_(y\ )$-- telje elastsusjõud; d - õlg
Erijuhtum on keha tasakaal toel. Sel juhul ei rakendu toe elastsusjõud ühele punktile, vaid jaotatakse üle keha aluse. Keha on tasakaalus, kui läbi keha massikeskme tõmmatud vertikaaljoon läbib tugiala, st tugipunkte ühendavatest joontest moodustatud kontuuri sees. Kui see joon ei ületa tugiala, läheb keha ümber.
1. ülesanne
Kaldtasapind on horisondi suhtes 30o nurga all (joonis 4). Sellel on keha P, mille mass on m=2 kg. Hõõrdumist võib tähelepanuta jätta. Üle ploki visatud niit moodustab kaldtasandiga 45o nurga. Millise koormuse Q raskuse juures on keha P tasakaalus?

Joonis 4
Kehale mõjuvad kolm jõudu: raskusjõud P, keerme pinge koormusega Q ja elastsusjõud F tasandi küljelt, mis surub seda tasapinnaga risti. Jagame jõu Р komponentideks: $\overrightarrow(Р)=(\overrightarrow(Р))_1+(\overrightarrow(Р))_2$. Tingimus $(\overrightarrow(P))_2=$ Tasakaaluks, võttes arvesse liikuva ploki pingutuse kahekordistumist, on vajalik, et $\overrightarrow(Q)=-(2\overrightarrow(P))_1$. Siit ka tasakaalutingimus: $m_Q=2m(sin \widehat((\overrightarrow(P))_1(\overrightarrow(P))_2)\ )$. Väärtused asendades saame: $m_Q=2\cdot 2(sin \left(90()^\circ -30()^\circ -45()^\circ \right)\ )=1,035\ kg$.
Tuules ripub lõastatud õhupall Maa erineva punkti kohal, mille külge on kinnitatud kaabel (joonis 5). Trossi pinge on 200 kg, nurk vertikaaliga on a=30$()^\circ$. Mis on tuule rõhu jõud?
\[(\overrightarrow(F))_in=-(\overrightarrow(T))_1;\ \ \ \ \left|(\overrightarrow(F))_in\right|=\left|(\overrightarrow(T)) _1\right|=Tg(sin (\mathbf \alpha )\ )\] \[\left|(\overrightarrow(F))_in\right|=\ 200\cdot 9.81\cdot (sin 30()^\circ \ )=981\ N\]

See loeng hõlmab järgmisi küsimusi:
1. Mehaaniliste süsteemide tasakaalu tingimused.
2. Tasakaalu stabiilsus.
3. Näide tasakaalupositsioonide määramisest ja nende stabiilsuse uurimisest.
Nende küsimuste uurimine on vajalik mehaanilise süsteemi võnkuvate liikumiste uurimiseks tasakaaluasendi suhtes distsipliinis "Masinaosad", probleemide lahendamiseks erialadel "Masinate ja mehhanismide teooria" ja "Materjalide tugevus".
Mehaaniliste süsteemide liikumise oluline juhtum on nende võnkuv liikumine. Võnkumised on mehaanilise süsteemi korduvad liikumised selle teatud positsioonide suhtes, mis toimuvad ajas enam-vähem korrapäraselt. Kursusetöös käsitletakse mehaanilise süsteemi võnkuvat liikumist tasakaaluasendi (suhtelise või absoluutse) suhtes.
Mehaaniline süsteem saab võnkuda piisavalt pika aja jooksul ainult stabiilse tasakaaluasendi lähedal. Seetõttu on enne võnkeliikumise võrrandite koostamist vaja leida tasakaaluasendid ja uurida nende stabiilsust.
Mehaaniliste süsteemide tasakaalutingimused.
Vastavalt põhimõttele võimalikud liigutused(staatika põhivõrrand), et mehaaniline süsteem, millele on kehtestatud ideaalsed, statsionaarsed, piiravad ja holonoomilised piirangud, oleks tasakaalus, on vajalik ja piisav, et kõik selle süsteemi üldistatud jõud on nulliga võrdsed:
kus on üldistatud jõud, mis vastab j- oh üldistatud koordinaat;
s- üldistatud koordinaatide arv mehaanilises süsteemis.
Kui uuritavale süsteemile koostati liikumisdiferentsiaalvõrrandid teist tüüpi Lagrange'i võrrandite kujul, siis võimalike tasakaaluasendite määramiseks piisab üldistatud jõudude võrdsustamisest nulliga ja saadud võrrandite lahendamisest. üldistatud koordinaadid.
Kui mehaaniline süsteem on potentsiaalses jõuväljas tasakaalus, siis võrranditest (1) saame järgmised tasakaalutingimused:
Seetõttu on tasakaaluasendis potentsiaalsel energial äärmuslik väärtus. Kõiki ülaltoodud valemitega määratletud tasakaalu ei saa praktikas realiseerida. Olenevalt süsteemi käitumisest tasakaaluasendist kõrvalekaldumisel räägitakse selle asendi stabiilsusest või ebastabiilsusest.
Tasakaalu stabiilsus
Tasakaalupositsiooni stabiilsuse mõiste määratlus anti 19. sajandi lõpus vene teadlase A. M. Ljapunovi töödes. Vaatame seda määratlust.
Arvutuste lihtsustamiseks lepime edaspidi kokku üldistatud koordinaadid q 1 , q 2 ,...,q s arvutage süsteemi tasakaaluasendist:
kus
Tasakaalupositsiooni nimetatakse stabiilseks suvaliselt väikese arvu korralleiad teise numbri , et juhul, kui üldistatud koordinaatide ja kiiruste algväärtused ei ületa:
üldiste koordinaatide ja kiiruste väärtusi süsteemi edasise liikumise ajal ei ületata .
Teisisõnu, süsteemi tasakaaluasend q 1 = q 2 = ...= q s= 0 kutsutakse jätkusuutlik, kui alati on võimalik leida selliseid piisavalt väikseid algväärtusi, mille juures süsteemi liikumineei jäta tasakaalupositsiooni suvaliselt väikesesse piirkonda. Ühe vabadusastmega süsteemi puhul saab süsteemi stabiilset liikumist visualiseerida faasitasandil (joonis 1).Stabiilse tasakaaluasendi jaoks esinduspunkti liikumine, alustades piirkonnast [ ] , ei lähe edaspidi piirkonnast kaugemale.

Joonis 1
Tasakaaluasendit nimetatakse asümptootiliselt stabiilne , kui süsteem aja jooksul läheneb tasakaaluasendile, st
Tasakaalupositsiooni stabiilsuse tingimuste määramine on üsna keeruline ülesanne, seetõttu piirdume kõige lihtsama juhtumiga: konservatiivsete süsteemide tasakaalu stabiilsuse uurimisega.
Selliste süsteemide tasakaalupositsioonide stabiilsuse piisavad tingimused on määratletud Lagrange – Dirichlet’ teoreem : konservatiivse mehaanilise süsteemi tasakaaluasend on stabiilne, kui tasakaaluasendis on süsteemi potentsiaalsel energial isoleeritud miinimum .
Mehaanilise süsteemi potentsiaalne energia määratakse kuni konstantini. Valime selle konstandi nii, et see on tasakaaluasendis potentsiaalne energia oli võrdne nulliga:
P(0)=0.
Siis on ühe vabadusastmega süsteemi jaoks piisav tingimus isoleeritud miinimumi olemasoluks koos vajaliku tingimusega (2)
Kuna tasakaaluasendis on potentsiaalsel energial isoleeritud miinimum ja P(0)=0 , siis selle positsiooni mõnes piiratud naabruses
П(q)=0.
Funktsioonid, millel on konstantne märk ja mis on võrdsed nulliga, kutsutakse välja ainult siis, kui kõik nende argumendid on nullid märk-kindel. Seetõttu, et mehaanilise süsteemi tasakaaluasend oleks stabiilne, on vajalik ja piisav, et selle asukoha läheduses oleks potentsiaalne energia üldistatud koordinaatide positiivselt määratletud funktsioon.
Lineaarsete süsteemide ja süsteemide puhul, mida saab tasakaalasendist väikeste kõrvalekallete korral lineaarseks taandada (lineariseerida), saab potentsiaalset energiat esitada üldistatud koordinaatide ruutkujuna.

kus - üldistatud jäikuse koefitsiendid.
Üldised koefitsiendidon konstantsed arvud, mida saab määrata otse potentsiaalse energia paisumisest jadaks või potentsiaalse energia teise tuletise väärtustest üldiste koordinaatide suhtes tasakaaluasendis:
Valemist (4) järeldub, et üldistatud jäikuse koefitsiendid on indeksite suhtes sümmeetrilised
Selle eest , et rahuldada piisavaid tingimusi tasakaaluasendi stabiilsuseks, peab potentsiaalne energia olema selle üldistatud koordinaatide positiivne kindel ruutvorm.
Matemaatikas on Sylvesteri kriteerium , mis annab ruutvormide positiivseks määratluseks vajalikud ja piisavad tingimused: ruutvorm (3) on positiivne kindel, kui selle koefitsientidest koosnev determinant ja kõik selle põhidiagonaali minoorid on positiivsed, s.t. kui koefitsiendid täidab tingimused
![]()
.....

Eelkõige selleks lineaarne süsteem kahe vabadusastmega on potentsiaalne energia ja Sylvesteri kriteeriumi tingimused vormis
Sarnaselt saab uurida suhtelise tasakaalu positsioone, kui potentsiaalse energia asemel võtta arvesse redutseeritud süsteemi potentsiaalset energiat.
P Näide tasakaalupositsioonide määramisest ja nende stabiilsuse uurimisest

Joonis 2
Kaaluge mehaaniline süsteem mis koosneb torust AB, mis on pöördepunkt OO 1ühendatud horisontaalse pöörlemisteljega ja kuul, mis liigub läbi toru hõõrdumiseta ja on ühendatud punktiga A vedruga torud (joon. 2). Määrame süsteemi tasakaaluasendid ja hindame nende stabiilsust järgmiste parameetrite järgi: toru pikkus l 2 = 1 m , varda pikkus l 1 = 0,5 m . deformeerimata vedru pikkus l 0 = 0,6 m, vedrukiirus c= 100 N/m. Toru kaal m 2 = 2 kg, varras - m 1 = 1 kg ja pall - m 3 = 0,5 kg. Kaugus OA võrdub l 3 = 0,4 m.
Kirjutame vaadeldava süsteemi potentsiaalse energia avaldise. See koosneb kolme keha potentsiaalsest energiast ühtlases gravitatsiooniväljas ja deformeerunud vedru potentsiaalsest energiast.
Keha potentsiaalne energia gravitatsiooniväljas on võrdne keha massi ja selle raskuskeskme kõrguse korrutisega sellest tasapinnast, milles potentsiaalset energiat peetakse nulliks. Olgu potentsiaalne energia varda pöörlemistelge läbival tasapinnal null OO 1 , siis gravitatsiooni jaoks
Elastsusjõu jaoks määratakse potentsiaalne energia deformatsiooni suuruse järgi
![]()
Leiame süsteemi võimalikud tasakaaluasendid. Tasakaalupositsioonides olevad koordinaatide väärtused on järgmise võrrandisüsteemi juured.

Sarnase võrrandisüsteemi saab koostada iga kahe vabadusastmega mehaanilise süsteemi jaoks. Mõnel juhul on võimalik saada süsteemi täpne lahendus. Süsteemi (5) puhul sellist lahendust ei eksisteeri, seega tuleb juuri otsida numbriliste meetoditega.
Lahendades transtsendentaalsete võrrandite süsteemi (5), saame kaks võimalikku tasakaaluasendit:
Saadud tasakaalupositsioonide stabiilsuse hindamiseks leiame kõik potentsiaalse energia teised tuletised üldistatud koordinaatide suhtes ja määrame nende põhjal üldistatud jäikuskoefitsiendid.
![]()
Keha on puhkeasendis (või liigub ühtlaselt ja sirgjooneliselt), kui kõigi talle mõjuvate jõudude vektorsumma on null. Väidetavalt tasakaalustavad jõud üksteist. Kui tegemist on teatud geomeetrilise kujuga kehaga, saab resultantjõu arvutamisel rakendada kõiki jõude keha massikeskmele.
Kehade tasakaalu tingimus
Selleks, et keha, mis ei pöörle, oleks tasakaalus, on vajalik, et kõigi sellele mõjuvate jõudude resultant oleks võrdne nulliga.
F → = F 1 → + F 2 → + . . + F n → = 0 .
Ülaltoodud joonis näitab tasakaalu tahke keha. Plokk on tasakaaluolekus kolme sellele mõjuva jõu toimel. Jõudude F 1 → ja F 2 → toimejooned lõikuvad punktis O. Raskusjõu rakenduspunkt on keha massikese C. Need punktid asuvad ühel sirgel ja resultantjõu F 1 → , F 2 → ja m g → arvutamisel taandatakse punktiks C .
Tingimusest, et kõigi jõudude resultant on võrdne nulliga, ei piisa, kui keha suudab pöörata ümber mingi telje.
Jõu d õlg on ristsuuna pikkus, mis on tõmmatud jõu mõjujoonest kuni selle rakenduspunktini. Jõumoment M on jõu õla ja selle mooduli korrutis.
Jõumoment kipub keha ümber oma telje pöörama. Neid hetki, mis pööravad keha vastupäeva, peetakse positiivseks. Jõumomendi mõõtühik in rahvusvaheline süsteem C - 1 N m e t r.
Definitsioon. hetke reegel
Kui kõigi kehale rakendatud momentide algebraline summa fikseeritud pöörlemistelje suhtes on võrdne nulliga, siis on keha tasakaalus.
M1 + M2 + . . + M n = 0

Tähtis!
Üldjuhul peavad kehade tasakaalu jaoks olema täidetud kaks tingimust: resultantjõud võrdub nulliga ja järgitakse momentide reeglit.
Mehaanikas on erinevat tüüpi tasakaalu. Seega eristatakse stabiilset ja ebastabiilset, aga ka ükskõikset tasakaalu.

Tüüpiline näide ükskõiksest tasakaalust on veerev ratas (või pall), mis suvalises punktis peatudes on tasakaaluseisundis.
Stabiilne tasakaal on selline keha tasakaal, kui selle väikeste kõrvalekalletega tekivad jõud või jõumomendid, mis kipuvad keha tasakaaluseisundisse viima.
Ebastabiilne tasakaal - tasakaaluseisund, väikese kõrvalekaldega, millest jõud ja jõudude momendid kipuvad keha veelgi enam tasakaalust välja viima.

Ülaltoodud joonisel on kuuli asend (1) - ükskõikne tasakaal, (2) - ebastabiilne tasakaal, (3) - stabiilne tasakaal.
keha koos fikseeritud telg pöörlemine võib olla mis tahes kirjeldatud tasakaaluasendis. Kui pöörlemistelg läbib massikeskme, tekib ükskõikne tasakaal. Stabiilses ja ebastabiilses tasakaalus paikneb massikese vertikaalsel joonel, mis läbib pöörlemistelge. Kui massikese on pöörlemisteljest allpool, on tasakaal stabiilne. Muidu vastupidi.

Tasakaalu erijuhtum on keha tasakaal toel. Sel juhul jaotub elastsusjõud kogu keha aluse peale ja ei läbi ühte punkti. Keha on tasakaalus, kui läbi massikeskme tõmmatud vertikaaljoon lõikub tugialaga. Vastasel juhul, kui joon massikeskmest ei lange tugipunkte ühendavate joonte moodustatud kontuuri, läheb keha ümber.
Toel oleva keha tasakaalu näide on kuulus Pisa torn. Legendi järgi kukutas Galileo Galilei õppimiseksperimente läbides sealt palle vabalangus tel.

Torni massikeskmest tõmmatud joon lõikab alust umbes 2,3 m kaugusel selle keskpunktist.
Kui märkate tekstis viga, tõstke see esile ja vajutage Ctrl+Enter
Klass: 10
Tunni esitlus






























 Tagasi edasi
Tagasi edasi
Tähelepanu! Slaidi eelvaade on ainult informatiivsel eesmärgil ja ei pruugi esindada esitluse kogu ulatust. Kui olete sellest tööst huvitatud, laadige alla täisversioon.
Tunni eesmärgid: Uurida kehade tasakaaluseisundit, tutvuda erinevate tasakaaluliikidega; välja selgitada tingimused, mille korral keha on tasakaalus.
Tunni eesmärgid:
- Koolitus: Uurida kahte tasakaalutingimust, tasakaalu tüüpe (stabiilne, ebastabiilne, ükskõikne). Uurige, millistel tingimustel on kehad stabiilsemad.
- Arendamine: Soodustada kognitiivse füüsikahuvi teket. Oskuste arendamine võrrelda, üldistada, peamist esile tõsta, järeldusi teha.
- Hariduslik: Kasvatada tähelepanu, oskust oma seisukohta väljendada ja seda kaitsta, arendada õpilaste suhtlemisoskust.
Tunni tüüp: uue materjali õppimine arvutitoega.
Varustus:
- Ketas "Töö ja jõud" jaotisest "Elektroonikatunnid ja testid".
- Tabel "Tasakaalutingimused".
- Prisma kallutatud nööriga.
- Geomeetrilised kehad: silinder, kuup, koonus jne.
- Arvuti, multimeediaprojektor, interaktiivne tahvel või ekraan.
- Esitlus.
Tundide ajal
Tänases tunnis saame teada, miks kraana ei kuku, miks Roly-Vstanka mänguasi naaseb alati algsesse olekusse, miks Pisa torn ei kuku?
I. Teadmiste kordamine ja täiendamine.
- Sõnasta Newtoni esimene seadus. Mis seisus on seadus?
- Millisele küsimusele vastab Newtoni teine seadus? Valem ja sõnastus.
- Millisele küsimusele vastab Newtoni kolmas seadus? Valem ja sõnastus.
- Mis on resultantjõud? Kuidas tal läheb?
- Kettalt "Kehade liikumine ja vastastikmõju" täitke ülesanne nr 9 "Erineva suunaga jõudude resultant" (vektori liitmise reegel (2, 3 harjutust)).
II. Uue materjali õppimine.
1. Mida nimetatakse tasakaaluks?
Tasakaal on puhkeseisund.
2. Tasakaalutingimused.(slaid 2)
a) Millal keha puhkab? Mis seadusest see tuleb?
Esimene tasakaalutingimus: Keha on tasakaalus, kui kehale mõjuvate välisjõudude geomeetriline summa on null. ∑ F = 0
b) Laske pardal mõjuda kaks võrdset jõudu, nagu on näidatud joonisel.

Kas ta on tasakaalus? (Ei, ta pöördub)
Puhkeolekus on ainult keskne punkt ja ülejäänud liiguvad. See tähendab, et keha tasakaalus püsimiseks on vajalik, et igale elemendile mõjuvate jõudude summa oleks võrdne 0-ga.
Teine tasakaalutingimus: Päripäeva mõjuvate jõudude momentide summa peab olema võrdne vastupäeva mõjuvate jõudude momentide summaga.
∑ M päripäeva = ∑ M vastupäeva
Jõumoment: M = F L
L - jõu õlg - lühim kaugus tugipunktist jõu toimejooneni.
3. Keha raskuskese ja selle asukoht.(slaid 4)
Keha raskuskese- see on punkt, mida läbib kõigi keha üksikutele elementidele mõjuvate paralleelsete gravitatsioonijõudude resultant (keha mis tahes asendis ruumis).
Leidke järgmiste kujundite raskuskese:

4. Tasakaalu liigid.
aga) (slaidid 5-8)


Väljund: Tasakaal on stabiilne, kui väikese kõrvalekaldega tasakaaluasendist tekib jõud, mis kipub seda sellesse asendisse tagasi viima.
Asend, milles selle potentsiaalne energia on minimaalne, on stabiilne. (slaid 9)
b) Tugipunktil või tugipunktil asuvate kehade stabiilsus.(slaidid 10-17)

Väljund:Ühel punktil või toetusjoonel asuva keha stabiilsuse tagamiseks on vajalik, et raskuskese oleks toetuspunktist (joonest) allpool.
c) kehade stabiilsus tasasel pinnal.
(slaid 18)
1) Tugipind- see ei ole alati kehaga kontaktis olev pind (vaid pind, mis on piiratud laua, statiivi jalgu ühendavate joontega)

2) Slaidi analüüs "Elektroonikatunnid ja testid", ketas "Töö ja jõud", tund "Tasakaalu tüübid".
1. pilt.
- Kuidas väljaheited erinevad? (Ruutjalga)
- Kumb on stabiilsem? (suurema alaga)
- Kuidas väljaheited erinevad? (raskuskeskme asukoht)
- Milline neist on kõige stabiilsem? (milline raskuskese on madalam)
- Miks? (Kuna seda saab ümber pöörata suurema nurga alla ilma ümberminekuta)
3) Kogemus hälbiva prismaga
- Paneme tahvlile nööriga prisma ja hakkame seda tasapisi üle ühe serva tõstma. Mida me näeme?
- Niikaua kui loodijoon ületab toega piiratud pinda, säilib tasakaal. Kuid niipea, kui raskuskeset läbiv vertikaal hakkab tugipinna piire ületama, läheb raamaturiiul ümber.
Parsimine slaidid 19.–22.

Järeldused:
- Suurima toetuspinnaga keha on stabiilne.
- Kahest sama ala kehast on keha, mille raskuskese on madalamal, stabiilne, sest seda saab suure nurga all ümber pöörata ilma.
Parsimine slaidid 23.–25.

Millised laevad on kõige stabiilsemad? Miks? (Mille jaoks lasti asub trümmides, mitte tekil)

Millised autod on kõige stabiilsemad? Miks? (Autode stabiilsuse suurendamiseks kurvides on teepeenar pöörde suunas kallutatud.)
Järeldused: Tasakaal võib olla stabiilne, ebastabiilne, ükskõikne. Kerede stabiilsus on seda suurem, mida suurem on tugipind ja mida madalam on raskuskese.
III. Kehade stabiilsust puudutavate teadmiste rakendamine.
- Millistel erialadel on kõige rohkem vaja teadmisi kehade tasakaalu kohta?
- Erinevate konstruktsioonide projekteerijad ja projekteerijad ( kõrghooned, sillad, teletornid jne)
- Tsirkuseartistid.
- Autojuhid ja teised spetsialistid.
(slaidid 28–30)
- Miks naaseb Roly-Vstanka mänguasja mis tahes kalde korral tasakaaluasendisse?
- Miks on Pisa torn viltu ja ei kuku?
- Kuidas jalgratturid ja mootorratturid tasakaalu hoiavad?
Õppetunni kokkuvõtted:
- Tasakaalu on kolme tüüpi: stabiilne, ebastabiilne, ükskõikne.
- Keha asend on stabiilne, kus selle potentsiaalne energia on minimaalne.
- Kehade stabiilsus tasasel pinnal on seda suurem, mida suurem on tugipind ja mida madalam on raskuskese.
Kodutöö: § 54 – 56 (G. Ya. Myakishev, B. B. Bukhovtsev, N. N. Sotski)
Kasutatud allikad ja kirjandus:
- G.Ya. Mjakišev, B.B. Bukhovtsev, N. N. Sotski. Füüsika. 10. klass.
- Filmiriba "Stabiilsus" 1976 (minu poolt filmiskanneriga skaneeritud).
- Ketas "Kehade liikumine ja interaktsioon" jaotisest "Elektroonikatunnid ja testid".
- Ketas "Töö ja jõud" jaotisest "Elektroonilised tunnid ja testid".
- Kokkupuutel 0
- Google Plus 0
- Okei 0
- Facebook 0