energiat nimetatakse skalaariks füüsiline kogus, mis on aine erinevate liikumisvormide üksikmõõt ja aine liikumise ühelt vormilt teisele ülemineku mõõt.
Aine erinevate liikumisvormide iseloomustamiseks tutvustatakse vastavaid energialiike, näiteks: mehaaniline, sisemine, elektrostaatilise energia, tuumasisene vastastikmõju jne.
Energia järgib jäävuse seadust, mis on üks olulisemaid loodusseadusi.
Mehaaniline energia E iseloomustab kehade liikumist ja vastastikmõju ning on kehade kiiruste ja suhteliste asendite funktsioon. See on võrdne kineetilise ja potentsiaalse energia summaga.
Kineetiline energia
Vaatleme juhtumit, kui massiline keha m mõjub konstantne jõud \(~\vec F\) (see võib olla mitme jõu resultant) ning jõu \(~\vec F\) ja nihke \(~\vec s\) vektorid on suunatud piki ühte sirget joon ühes suunas. Sel juhul saab jõu tehtud tööd määratleda kui A = F∙s. Jõumoodul vastavalt Newtoni teisele seadusele on F = m∙a ja nihkemoodul sühtlaselt kiirendatud sirgjoonelise liikumisega on see seotud initsiaali moodulitega υ 1 ja viimane υ 2 kiirust ja kiirendust aga\(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
Seega, tööle saame
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (üks)
Nimetatakse füüsikalist suurust, mis võrdub poolega keha massi ja selle kiiruse ruudu korrutisest keha kineetiline energia.
Kineetiline energia on tähistatud tähega E k .
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Siis saab võrdsuse (1) kirjutada järgmisel kujul:
\(~A = E_(k2) - E_(k1)\) . (3)
Kineetilise energia teoreem
kehale rakendatavate resultantjõudude töö on võrdne keha kineetilise energia muutumisega.
Kuna kineetilise energia muutus on võrdne jõu tööga (3), siis keha kineetiline energia väljendub tööga samades ühikutes ehk džaulides.
Kui kehamassi algkiirus m on null ja keha suurendab kiirust väärtuseni υ , siis on jõu töö võrdne keha kineetilise energia lõppväärtusega:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Kineetilise energia füüsiline tähendus
Kiirusega υ liikuva keha kineetiline energia näitab, kui palju tööd peab puhkeolekus kehale mõjuv jõud selle kiiruse saavutamiseks tegema.
Potentsiaalne energia
Potentsiaalne energia on kehade vastasmõju energia.
Maast kõrgemale tõstetud keha potentsiaalne energia on keha ja Maa vastastikmõju energia gravitatsioonijõud. Elastselt deformeerunud keha potentsiaalne energia on interaktsioonienergia eraldi osad kehad omavahel elastsete jõudude toimel.
potentsiaal helistas tugevus, mille toimimine sõltub ainult liikumise alg- ja lõppasendist materiaalne punkt või keha ja ei sõltu trajektoori kujust.
Suletud trajektoori korral on potentsiaalse jõu töö alati null. Potentsiaalsete jõudude hulka kuuluvad gravitatsioonijõud, elastsusjõud, elektrostaatilised jõud ja mõned teised.
Jõud, mille töö sõltub trajektoori kujust, nimetatakse mittepotentsiaalne. Materiaalse punkti või keha liigutamisel mööda suletud trajektoori ei võrdu mittepotentsiaalse jõu töö nulliga.
Keha ja Maa vastasmõju potentsiaalne energia
Leidke gravitatsiooni abil tehtud töö F t keha liigutamisel massiga m vertikaalselt kõrguselt alla h 1 maapinnast kõrgemale kõrgusele h 2 (joonis 1). Kui erinevus h 1 – h 2 on tühine võrreldes Maa keskpunkti kaugusega, siis gravitatsioonijõuga F m keha liikumise ajal võib pidada konstantseks ja võrdseks mg.
Kuna nihe langeb suunaliselt kokku gravitatsioonivektoriga, siis gravitatsiooni poolt tehtav töö on
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (viis)
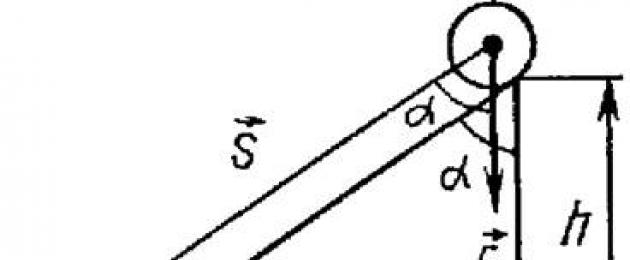
Vaatleme nüüd keha liikumist piki kaldtasandit. Keha liigutamisel kaldtasapinnast allapoole (joon. 2) gravitatsioon F t = m∙g teeb töö ära
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
kus h on kaldtasandi kõrgus, s- nihkemoodul, mis on võrdne kaldtasandi pikkusega.

Keha liikumine punktist IN täpselt FROM piki mis tahes trajektoori (joonis 3) võib vaimselt kujutada koosnevat liikumistest mööda erineva kõrgusega kaldtasandite lõike h’, h'' jne. Töö AGA gravitatsioon lõpuni välja IN sisse FROM on võrdne tee üksikute lõikude töö summaga:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
kus h 1 ja h 2 - kõrgused Maa pinnast, millel asuvad punktid vastavalt IN Ja FROM.

Võrdsus (7) näitab, et raskusjõu töö ei sõltu keha trajektoorist ja on alati võrdne raskusmooduli ja kõrguste erinevuse korrutisega alg- ja lõppasendis.
Alla liikudes on gravitatsiooni töö positiivne, üles liikudes negatiivne. Gravitatsiooni töö suletud trajektooril on null.
Võrdsust (7) võib esitada järgmiselt:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Füüsikaline suurus, mis võrdub kehamassi ja kiirendusmooduli korrutisega vabalangus ja kõrgust, milleni keha on Maa pinnast kõrgemale tõstetud, nimetatakse potentsiaalne energia keha ja maa vastastikmõju.
Raskusjõu töö keha liigutamisel massiga m kõrgusel asuvast punktist h 2, kõrgusel asuvasse punkti h 1 Maa pinnast, on piki mis tahes trajektoori võrdne muutusega potentsiaalne energia keha ja Maa vastastikmõju, võetud vastupidise märgiga.
\(~A = - (E_(p2) - E_(p1))\) . (üheksa)
Potentsiaalne energia on tähistatud tähega E p .
Maast kõrgemale tõstetud keha potentsiaalse energia väärtus sõltub nulltaseme valikust, st kõrgusest, mille juures potentsiaalne energia eeldatakse nulliks. Tavaliselt eeldatakse, et Maa pinnal oleva keha potentsiaalne energia on null.
Selle nulltaseme valikuga potentsiaalne energia E p keha kõrgusel h Maa pinnast kõrgemal on võrdne keha massi m ja vabalangemiskiirenduse mooduli korrutisega g ja kaugus h see Maa pinnalt:
\(~E_p = m \cdot g \cdot h\) . (10)
Keha ja Maa vastastikmõju potentsiaalse energia füüsiline tähendus
Keha potentsiaalne energia, millele gravitatsioon mõjub, on võrdne gravitatsiooni poolt tehtava tööga keha liigutamisel nulltasemele.
Erinevalt translatsioonilise liikumise kineetilisest energiast, millel võivad olla ainult positiivsed väärtused, võib keha potentsiaalne energia olla kas positiivne või negatiivne. kehamass m kõrgusel h, kus h < h 0 (h 0 - nullkõrgus), on negatiivse potentsiaalse energiaga:
\(~E_p = -m \cdot g \cdot h\) .
Gravitatsioonilise interaktsiooni potentsiaalne energia
Kahest materiaalsest punktist koosneva süsteemi ja masside gravitatsioonilise vastasmõju potentsiaalne energia m Ja M asub eemal rüks teisest on võrdne
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (üksteist)
kus G on gravitatsioonikonstant ja potentsiaalse energia etalon null ( E p = 0) on aktsepteeritud r = ∞.
Keha gravitatsioonilise vastasmõju potentsiaalne energia massiga m maaga kus h on keha kõrgus maapinnast, M e on Maa mass, R e on Maa raadius ja potentsiaalse energia nullpunktiks on valitud h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
Võrdlusnulli valimisel samadel tingimustel keha gravitatsioonilise vastasmõju potentsiaalne energia massiga m koos Maaga madalatel kõrgustel h (h « R e) on võrdne
\(~E_p = m \cdot g \cdot h\) ,
kus \(~g = G \cdot \frac(M_e)(R^2_e)\) on gravitatsioonikiirenduse moodul Maa pinna lähedal.
Elastselt deformeerunud keha potentsiaalne energia
Arvutame töö, mida teeb elastsusjõud, kui vedru deformatsioon (pikenemine) muutub mingist algväärtusest x 1 kuni lõpliku väärtuseni x 2 (joonis 4, b, c).

Vedru deformeerumisel muutub elastsusjõud. Elastsusjõu töö leidmiseks võib võtta jõumooduli keskmise väärtuse (sest elastsusjõud sõltub lineaarselt x) ja korrutada nihkemooduliga:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
kus \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . Siit
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) või \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (neliteist)
Nimetatakse füüsikalist suurust, mis võrdub poolega keha jäikuse ja selle deformatsiooni ruudu korrutisest potentsiaalne energia elastselt deformeerunud keha:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
Valemitest (14) ja (15) järeldub, et elastsusjõu töö on võrdne elastselt deformeerunud keha potentsiaalse energia muutusega, mis on võetud vastupidise märgiga:
\(~A = -(E_(p2) - E_(p1))\) . (16)
Kui x 2 = 0 ja x 1 = X, siis, nagu on näha valemitest (14) ja (15),
\(~E_p = A\) .
Deformeerunud keha potentsiaalse energia füüsikaline tähendus
elastselt deformeerunud keha potentsiaalne energia on võrdne tööga, mida teeb elastsusjõud, kui keha läheb olekusse, kus deformatsioon on null.
Potentsiaalne energia iseloomustab vastastikku toimivaid kehasid ja kineetiline energia liikuvaid kehasid. Nii potentsiaalne kui ka kineetiline energia muutuvad ainult sellise kehade vastasmõju tulemusena, kus kehadele mõjuvad jõud teevad nullist erinevat tööd. Vaatleme küsimust energia muutumisest suletud süsteemi moodustavate kehade vastastikmõjude käigus.
suletud süsteem on süsteem, millele välised jõud ei mõju või nende jõudude tegevust ei kompenseerita. Kui mitu keha interakteeruvad üksteisega ainult gravitatsiooni- ja elastsusjõudude mõjul ja neile ei mõju ükski välisjõud, siis mis tahes kehade vastasmõju korral on elastsus- ehk gravitatsioonijõudude töö võrdne kehade potentsiaalse energia muutusega, võttes arvesse. vastupidise märgiga:
\(~A = -(E_(p2) - E_(p1))\) . (17)
Kineetilise energia teoreemi järgi on samade jõudude töö võrdne kineetilise energia muutusega:
\(~A = E_(k2) - E_(k1)\) . (kaheksateist)
Võrdluste (17) ja (18) võrdlus näitab, et kehade kineetilise energia muutus suletud süsteemis on absoluutväärtuses võrdne kehade süsteemi potentsiaalse energia muutusega ja sellele vastandmärgiga:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) või \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
Energia jäävuse seadus mehaanilistes protsessides:
suletud süsteemi moodustavate ning gravitatsiooni- ja elastsusjõudude mõjul üksteisega vastastikmõjus olevate kehade kineetilise ja potentsiaalse energia summa jääb konstantseks.
Kehade kineetilise ja potentsiaalse energia summat nimetatakse täis mehaaniline energia.
Toome kõige lihtsam kogemus. Viska üles teraskuul. Olles teatanud algkiiruse υ alguse, anname sellele kineetilise energia, mille tõttu see hakkab ülespoole tõusma. Gravitatsiooni toime viib palli kiiruse ja seega ka kineetilise energia vähenemiseni. Kuid pall tõuseb üha kõrgemale ja omandab üha rohkem potentsiaalset energiat ( E p= m∙g∙h). Seega ei kao kineetiline energia jäljetult, vaid see muundatakse potentsiaalseks energiaks.
Trajektoori tipppunkti jõudmise hetkel ( υ = 0) pall on täielikult ilma kineetilisest energiast ( E k = 0), kuid samal ajal muutub selle potentsiaalne energia maksimaalseks. Seejärel muudab pall suunda ja liigub kasvava kiirusega alla. Nüüd toimub potentsiaalse energia vastupidine muundumine kineetiliseks energiaks.
Energia jäävuse seadus näitab füüsiline tähendus mõisted tööd:
gravitatsiooni- ja elastsusjõudude töö võrdub ühelt poolt kineetilise energia suurenemisega ja teiselt poolt kehade potentsiaalse energia vähenemisega. Seetõttu võrdub töö ühest vormist teise muundatud energiaga.
Mehaanilise energia muutmise seadus
Kui interakteeruvate kehade süsteem ei ole suletud, siis selle mehaaniline energia ei säili. Sellise süsteemi mehaanilise energia muutus on võrdne välisjõudude tööga:
\(~A_(vn) = \Delta E = E - E_0\) . (kakskümmend)
kus E Ja E 0 on süsteemi mehaanilised energiad vastavalt lõpp- ja algolekus.
Sellise süsteemi näide on süsteem, milles koos potentsiaalsete jõududega toimivad ka mittepotentsiaalsed jõud. Hõõrdejõud on mittepotentsiaalsed jõud. Enamikul juhtudel, kui nurk hõõrdejõu vahel F r keha on π radiaani, on hõõrdejõu töö negatiivne ja võrdne
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
kus s 12 - keha teekond punktide 1 ja 2 vahel.
Süsteemi liikumise ajal tekkivad hõõrdejõud vähendavad selle kineetilist energiat. Selle tulemusena väheneb suletud mittekonservatiivse süsteemi mehaaniline energia alati, muutudes mittemehaaniliste liikumisvormide energiaks.
Näiteks mööda horisontaalset teelõigu liikuv auto läbib pärast mootori väljalülitamist teatud vahemaa ja peatub hõõrdejõudude mõjul. Auto edasiliikumise kineetiline energia võrdus nulliga ja potentsiaalne energia ei suurenenud. Auto pidurdamisel kuumenesid piduriklotsid, autorehvid ja asfalt. Järelikult hõõrdejõudude toimel auto kineetiline energia ei kadunud, vaid muutus siseenergiaks termiline liikumine molekulid.
Energia jäävuse ja muundamise seadus
igas füüsilises interaktsioonis muundub energia ühest vormist teise.
Mõnikord nurk hõõrdejõu vahel F tr ja elementaarnihe Δ r on null ja hõõrdejõu töö on positiivne:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Näide 1. Võib väline jõud F tegutseb baaris IN, mis saab kärul libiseda D(joonis 5). Kui käru liigub paremale, siis libiseva hõõrdejõu töö F tr2, mis toimib kärule lati küljelt, on positiivne:

Näide 2. Kui ratas veereb, on selle veerehõõrdejõud suunatud piki liikumist, kuna ratta kokkupuutepunkt horisontaalpinnaga liigub ratta liikumise suunale vastupidises suunas ja hõõrdejõu töö on positiivne (Joonis 6):

Kirjandus
- Kabardin O.F. Füüsika: Ref. materjalid: Proc. toetus õpilastele. - M.: Valgustus, 1991. - 367 lk.
- Kikoin I.K., Kikoin A.K. Füüsika: Proc. 9 raku jaoks. keskm. kool - M .: Pro-sveshchenie, 1992. - 191 lk.
- Füüsika algõpik: Proc. toetust. 3 köites / Toim. G.S. Landsberg: v. 1. Mehaanika. Kuumus. Molekulaarfüüsika. – M.: Fizmatlit, 2004. – 608 lk.
- Yavorsky B.M., Seleznev Yu.A. Füüsika teatmik ülikooli ja eneseharimise sisseastujatele. – M.: Nauka, 1983. – 383 lk.
2.4.1. Kineetiline energia mehaaniline süsteem. Kiirusega liikuva massi materiaalse punkti kineetilist energiat nimetatakse suuruseks
Mehaanilise süsteemi kineetiline energia on sellesse süsteemi kuuluvate materiaalsete punktide kineetiliste energiate summa:
Juhtudel, kui süsteemi mass jaotub pidevalt, asendatakse avaldises (7) olev liitmine integreerimisega üle jaotuspiirkonna.
Antud on seos mehaanilise süsteemi kineetilise energia väärtuste vahel kahes tugiraamistikus, millest üks on paigal ja teine liigub edasi kiirusega , kus punkt C on mehaanilise süsteemi massikese. Koenigi teoreemi järgi:
![]() . (8)
. (8)
Siin ![]() - mehaanilise süsteemi kineetiline energia liikuvas koordinaatsüsteemis.
- mehaanilise süsteemi kineetiline energia liikuvas koordinaatsüsteemis.
Avaldiste (6, 7, 8) kasutamine võimaldab kirjutada valemeid kineetilise energia arvutamiseks tahke keha:
Keha translatsioonilise liikumise ajal massiga kiirusel
Kui pöörleb nurkkiirusega ümber fikseeritud telg inertsmomendiga keha
jäiga keha tasapinnalise paralleelse liikumise ajal nurkkiirusega keskse inertsmomendi väärtusel ümber liikumistasandiga risti oleva telje ja inertsmomendi väärtusel hetkelise pöörlemistelje ümber
![]() . (11)
. (11)
2.4.2. Energia omadused. Jõu energiaomadused hõlmavad selle võimsust, tööd ja potentsiaalset energiat.
Võimsus jõudu, mille rakenduspunkt liigub kiirusega, nimetatakse väärtuseks
Töö tugevus elementaarsel intervallil aeg ja sellele ajavahemikule vastav rakenduspunkti elementaarne nihe määratakse reegliga
tööd tugevus piiratud intervallil aeg ja vastav raadiuse muutus - selle jõu rakenduspunkti vektorit alates kuni nimetatakse väärtuseks
 . (14)
. (14)
Sarnaselt arvutatakse ka jõupaari momendi töö.
Potentsiaalne energia on määratletud ainult juhtudel, kui avaldis (13) on kogudiferentsiaal:
Kui tingimus (15) on täidetud, öeldakse, et jõud on potentsiaalne. Seosed, mis ühendavad jõuprojektsioone valitud koordinaatsüsteemi telgedel funktsiooniga:
Kui jõu rakenduspunkt on liikunud asendist asendisse , siis saab (15) integreerimisega saada
 . (17)
. (17)
Märkus: potentsiaalne energia on defineeritud kuni konstantse tähtajani; märgitud tunnus võimaldab eeldada, et potentsiaalne energia on meie valitud punktis (näiteks lähtepunktis) võrdne nulliga.
Juhul, kui mehaanilisele süsteemile mõjuvate jõudude kogumi kohta on võimalik potentsiaalse energia väljendus kirja panna, nimetatakse mehaanilist süsteemi. konservatiivne. Sellistel mehaanilistel süsteemidel on olulised omadused - töö aktiivsed jõud ei sõltu trajektoori tüübist ja seda mööda liikumise seadusest; töötada sõidu ajal suletud silmus võrdub nulliga.
Funktsiooni olemasolu tingimused:
2.4.3. Kineetilise energia muutumise teoreem. Teoreemi kirjutamine mehaanilise süsteemi kineetilise energia muutumise kohta diferentsiaalkujul:
Mehaanilise süsteemi kineetilise energia aja tuletis on võrdne välis- ja sisejõudude võimsusega.
Kineetilise energia muutumise teoreemi integraalvorm
![]() , (20)
, (20)
kus; ; ; .
Konkreetsel juhul, kui potentsiaalse energia avaldise saab kirjutada süsteemi välis- ja sisejõudude kogumile, on mehaanilise koguenergia jäävuse seadus täidetud.
ja süsteem ise on konservatiivne.
NÄIDE 3. Joonisel 2 näidatud mehaanilise süsteemi jaoks hankige diferentsiaalvõrrand lasti liikumine.
LAHENDUS. Kasutame teoreemi kineetilise energia muutumise kohta diferentsiaalkujul (19). Vabaneme vaimselt sidemetest, rakendades mehaanilise süsteemi kehadele vastavaid reaktsioone (vt joon. 2). Märkus: koaksiaalploki statsionaarsele massikeskmele rakendatud jõude ei kuvata, kuna nende võimsus on null.

Koostame mehaanilise süsteemi kineetilise energia avaldise.
Lõplik (lõplik) vorm. Materiaalse punkti kineetilise energia muutumise teoreem: materiaalse punkti kineetilise energia muutus selle mõnel nihkel on võrdne kõigi sellele punktile samal nihkel mõjuvate jõudude töö algebralise summaga.
Mehaanilise süsteemi kineetilise energia muutumise teoreem on sõnastatud: mehaanilise süsteemi kineetilise energia muutus selle liikumisel ühest asendist teise võrdub kõigi selle liikumise ajal süsteemile rakendatud väliste ja sisemiste kulgede tööde summaga:
Muutumatu süsteemi korral on sisejõudude töö summa mis tahes nihke korral null (), siis
Mehaanilise energia jäävuse seadus. Kui mehaaniline süsteem liigub potentsiaaliga jõudude toimel, määravad süsteemi kineetilise energia muutused sõltuvused:
kus ,
Süsteemi kineetilise ja potentsiaalse energia summat nimetatakse täis mehaaniline energia süsteemid.
Sellel viisil, kui mehaaniline süsteem liigub statsionaarses potentsiaalväljas, jääb süsteemi mehaaniline koguenergia liikumise ajal muutumatuks.
Ülesanne. Gravitatsiooni mõjul olev mehaaniline süsteem hakkab puhkeolekust liikuma. Võttes arvesse keha 3 libisemishõõrdumist, jättes tähelepanuta muud venitamatuks eeldatavad takistusjõud ja keermete massid, määrake keha 1 kiirus ja kiirendus hetkel, mil tema läbitud tee on võrdne s(Joon. 3.70).
Vastuvõetavas ülesandes:
Lahendus. Mehaanilisele süsteemile mõjuvad aktiivsed jõud , . Rakendades süsteemi piirangutest vabastamise põhimõtet, näitame liigendkinnitusega toe 2 ja kareda kaldpinna reaktsioone. Süsteemi kehade liikumiskiiruste suunad on kujutatud, võttes arvesse asjaolu, et keha 1 laskub.
Lahendame ülesande, rakendades teoreemi mehaanilise süsteemi kineetilise energia muutumise kohta:
kus T ja - süsteemi kineetiline energia alg- ja lõppasendis; - süsteemile rakendatud välisjõudude töö algebraline summa süsteemi liigutamisel algasendist lõppasendisse; - süsteemi sisejõudude töö summa samal nihkel.
Vaadeldava süsteemi jaoks, mis koosneb absoluutselt jäikadest kehadest, mis on ühendatud pikendamatute keermetega:
Kuna süsteem oli puhkeasendis, siis . Järelikult:
Süsteemi kineetiline energia on kehade 1, 2, 3 kineetiliste energiate summa:
Edasi liikuva koormuse 1 kineetiline energia on:
Ümber telje pöörleva ploki 2 kineetiline energia Oz, joonise tasapinnaga risti:
Keha 3 kineetiline energia selle translatsioonilises liikumises:
Sellel viisil,
Kineetilise energia avaldis sisaldab kõigi süsteemi kehade tundmatuid kiirusi. Määratlust peate alustama . Vabaneme ebavajalikest tundmatutest, koostades seosevõrrandid.
Seosevõrrandid pole midagi muud kui kinemaatilised seosed süsteemipunktide kiiruste ja nihkete vahel. Piiranguvõrrandite koostamisel väljendame kõik süsteemi kehade tundmatud kiirused ja nihked koormuse 1 kiiruse ja nihke kaudu.
Väikese raadiusega velje mis tahes punkti kiirus on võrdne keha 1 kiirusega, samuti keha 2 nurkkiiruse ja pöörlemisraadiuse korrutisega r:
Siit väljendame keha nurkkiirust 2:
Suure raadiusega ploki serva mis tahes punkti pöörlemiskiirus on ühelt poolt võrdne ploki nurkkiiruse ja pöörlemisraadiuse korrutisega ning teiselt poolt ploki pöörlemisraadiuse korrutisega. keha 3:
Asendades nurkkiiruse väärtuse, saame:
Olles algtingimustes integreerinud avaldised (a) ja (b), kirjutame süsteemi punktide nihke suhte:
Teades süsteemi punktide kiiruste peamisi sõltuvusi, pöördume tagasi kineetilise energia avaldise juurde ja asendame sellega võrrandid (a) ja (b):
Keha 2 inertsmoment on:
Asendades kehade masside väärtused ja keha 2 inertsmomendi, kirjutame:
Süsteemi kõigi välisjõudude tööde summa kindlaksmääramine antud nihke korral.
Nüüd võrdsustame vastavalt mehaanilise süsteemi kineetilise energia muutumise teoreemile väärtused T Ja
Keha 1 kiirus saadakse avaldisest (r)
Keha 1 kiirenduse saab määrata võrrandi (r) diferentseerimise teel aja suhtes.
Mehaanilise süsteemi kineetiline energia on kõigi selle materiaalsete punktide kineetiliste energiate summa:
Arvutame diferentsiaali kineetilise energia avaldisest ja sooritame mõned lihtsad teisendused:

Jättes vahele vahepealsed väärtused ja kasutades elementaarse töö tähistamiseks varem kasutusele võetud sümbolit, kirjutame:

Seega on mehaanilise süsteemi kineetilise energia diferentsiaal võrdne kõigi süsteemi punktidele mõjuvate välis- ja sisejõudude elementaartööde summaga. See on kineetilise energia muutumise teoreemi sisu.
Pange tähele, et süsteemi sisejõudude töö summa ei ole üldjuhul võrdne nulliga. See kaob vaid mõnel erijuhul: kui süsteemina toimib absoluutselt jäik keha; absoluutselt jäikade kehade süsteem, mis interakteeruvad mittedeformeeruvate elementide (ideaalsed hinged, absoluutselt jäigad vardad, venimatud niidid jne) abil. Sel põhjusel on kineetilise energia muutumise teoreem ainus dünaamika üldistest teoreemidest, mis arvestab sisejõudude mõju.
Kineetilise energia muutumist võib huvitada mitte lõpmatult väikese aja jooksul, nagu on tehtud ülal, vaid teatud piiratud aja jooksul. Seejärel saate integreerimisega saada:

Siin - vastavalt kineetilise energia väärtused ajahetkedel - välis- ja sisejõudude kogutöö summa vaadeldava aja jooksul.
Saadud võrdsus väljendab teoreemi kineetilise energia muutumise kohta lõplikul (integraalsel) kujul, mille saab sõnastada järgmiselt: kineetilise energia muutus mehaanilise süsteemi üleminekul ühest asendist teise võrdub kõigi väliste ja sisemiste jõudude kogutöö.

5. loeng Kineetilise energia muutumise teoreem
5. 1. Jõutöö
Las jõudu ![]() on kõigi punktile Р rakendatud süsteemi jõudude resultant ja ( dx,
dy,
dz)
- punkti P elementaarne liikumine mööda selle trajektoori P 1 P 2 (joonis 5.1). elementaarne töö dAGA jõudu nimetatakse skalaarkorrutiseks
on kõigi punktile Р rakendatud süsteemi jõudude resultant ja ( dx,
dy,
dz)
- punkti P elementaarne liikumine mööda selle trajektoori P 1 P 2 (joonis 5.1). elementaarne töö dAGA jõudu nimetatakse skalaarkorrutiseks
Algtöö on skalaarsuurus. Kui jõu ja nihke suuna vaheline nurk on , võib avaldist (5.1) esitada järgmiselt
kus on jõu projektsioon elementaarnihke suunale (või punkti kiiruse suunale).
Funktsiooni märgist sõltub elementaartöö märk . Kui on teravnurk, siis , Kui on nürinurk, siis , kui , siis .
Olgu punkt R teeb viimase liigutuse positsioonilt positsioonile , kirjeldades kaare . Jagame kaare kaheks osaks n suvalised väikesed lõigud, mis näitavad numbriga lõigu pikkust küle . Siis elementaarne töö jõu edasi k-ndas jaotis on võrdne ja kogu tee alates kuni - üksikute jaotiste töö summa

Töö täpse väärtuse saame limiidile üle minnes, eeldusel, et sektsioonide arv n suureneb lõputult ja iga sektsiooni pikkus väheneb:
 .
.
Sellist piiri nimetatakse esimest tüüpi kõverjooneliseks integraaliks kaare kohal ja see kirjutatakse järgmiselt
![]() . (5.3)
. (5.3)
Integreerimise tulemuseks on terviklik töö AGA tugevus F arvestatud lõplikul nihkel mööda rada .
5. 1. 1. Raskusjõu töö
Las olla m on punkti mass, g- gravitatsiooni kiirendus. Siis

Arvutades tööd valemitega (5.1) ja (5.3), saame

kus on kukkumise kõrgus.
Kui punkt on tõstatatud, seega, .
5. 1. 2. Lineaarse elastsusjõu töö

Laske materjalil osutada R liigub mööda telge Oh(joonis 5.3) vedru toimel, mille külge see on kinnitatud. Kui kell , , siis vedru deformeerub ja punkti väikeste kõrvalekallete korral võime eeldada, et sellele mõjub vedru küljelt elastsusjõud. Seejärel elastsusjõu töö nihkel x 0 x 1 on võrdne
 . (5.5)
. (5.5)
Elastsusjõu töö võrdub poolega jäikusteguri ning vedru alg- ja lõpliku pikenemise (või kokkusurumise) ruutude vahest.
5. 1. 3. Jäigale kehale rakendatavate jõudude elementaarne töö
Vaatleme keha liikumist tasapinnal. Las olla KOHTA- meelevaldselt valitud punkt tahkel kehal (joon. 5.4). Nimetagem seda postiks. Siis saab keha liikumist tasapinnal kujutada kõige lihtsamate summana: translatsiooniline liikumine koos poolusega ja keha pöörlemine ümber pooluse. Seejärel määratletakse punkti kiirus fikseeritud koordinaatsüsteemi suhtes kahe kiiruse geomeetrilise summana
kus on pooluse kiirus, on jäiga keha nurkkiiruse vektor, on Euleri kiirus, st punkti kiirus selle pöörlemisel ümber pooluse.

Esitame jäika keha kui mehaanilist süsteemi, mis koosneb Nüksikud punktid, mille vastastikune kaugus ei muutu.
Arvutage punkti nihe jõu mõjul:
Siis .
Algtöö võib vastavalt punktile (5.1) kirjutada järgmiselt
Vektorite segakorrutise omaduste kasutamine ![]() , kirjutame vormi viimase avaldise ümber
, kirjutame vormi viimase avaldise ümber
Olgu - kõigi keha punktis rakendatud välis- ja sisejõudude (joon. 5.4) resultant, s.o.
![]() .
.
Siis (a) kirjutatakse kui

Vastavalt (3.1 ja 3.2) põhivektor ja süsteemi sisejõudude põhimoment on võrdne nulliga, saame
siin: ![]() on peamine vektor,
on peamine vektor, ![]() on välisjõudude peamine moment punkti suhtes KOHTA.
on välisjõudude peamine moment punkti suhtes KOHTA.
Erijuhtumid
A. Jäiga keha translatsiooniline liikumine. Kõigil keha punktidel on samad nihked (joonis 5.5, a) nii absoluutväärtuses kui ka suunas, siis (5.6) saame (siin):
![]() . (5.7)
. (5.7)
b. Jäiga keha pöörlemine ümber fikseeritud telje. Laske telg z läbib pooluse KOHTA(joonis 5.5b). Siis , ; alates (5.6) saame
![]() . (5.8)
. (5.8)

Näide. mähise mass m ja raadius R mida liigutab pidev jõud F, rakendatakse punktis AGA(joonis 5.6). Rull veereb paremale, ilma et see krobelisel pinnal libiseks.

Arvutage kõigi välisjõudude töö, kui pooli keskpunkt on nihkunud vahemaa , on veerehõõrdetegur, on hõõrdejõud, r on selle pooli südamiku raadius, millele jõud rakendatakse.
Lahendus. Mähis teeb tasase liikumise. Kuna rullimine toimub ilma libisemiseta, siis asub kiiruste hetkkese pooli kokkupuutepunktis tasapinnaga, s.o. punktis R(joon.5.6). Suuname S-telje horisontaalselt paremale. Vastavalt liikumissuunale võtame pöördenurga positiivse suuna vastupäeva.
Laske mähise keskel FROM kolib aadressile . Sel juhul pöördub mähis nurga võrra. Kust siis
Punkti võtmine R hetkelise pöörlemistelje jaoks arvutame elementaarse töö valemi (5.8) abil:
 (aga)
(aga)
Siin: jõudude toimeliinid ja mg risti pöörlemistelje, nii et ; edasi, kus N on normaalne reaktsioonijõud.
Soovitud töö määramiseks tuleb võtta (a) kindel integraal vahemikus 0 kuni SAGA. Hangi
5. 2. Jõuväli. Toitefunktsioon. Potentsiaalne energia
Oletame, et punkt liigub mingis ruumis ja sellele mõjub ruumi poolt jõud, mis sõltub punkti asukohast selles ruumis, kuid ei sõltu punkti kiirusest. Sel juhul ütleme, et ruum on antud jõuväli, ja ka seda, et punkt liigub jõuväljas. Materiaalsete punktide süsteemi vastavad mõisted on sarnased.
Mehaanikas kohtab sageli jõude, mis sõltuvad nende rakenduspunktide asukohast. Näiteks materjali punktile rakendatav elastsusjõud, mis liigub vedru toimel mööda horisontaalset sirgjoont. Jõuvälja kõige olulisem näide looduses on gravitatsiooniväli: Päikese toime antud massiga planeedile on igas ruumipunktis määratud seadusega. gravitatsiooni.
Jõuvälja nimetatakse potentsiaal kui on olemas skalaarfunktsioon U, olenevalt ainult materjalisüsteemi koordinaatidest , , punkt-punkt (võimalik, et ka ajaliselt), nii et
Funktsiooni kutsutakse toitefunktsioon.
Mõelge tugevusfunktsiooni omadustele.
Algtöö (5.1) on jõufunktsiooniga seotud järgmiselt
Sellel viisil, jõu elementaartöö potentsiaalses jõuväljas on võrdne täielik diferentsiaal toitefunktsioonist ii.
Täielik töö jõud punktist lõigus ![]() asja juurde
asja juurde ![]() (joonis 5.1)
(joonis 5.1)
need. . (5.10)
Saadud avaldistest järeldub, et
1. jõu töö potentsiaalses jõuväljas piki mis tahes suletud rada on null;
2. jõu töö potentsiaalses jõuväljas sõltub ainult lõpu ja algustähe asukohast punktid, kuid tee ise ei mängi rolli.
Potentsiaalne energia. Potentsiaalne energia P jõuvälja vaadeldavas punktis R nimetatakse tööd, mida teevad materiaalsele punktile mõjuvad väljajõud, kui see liigub punktist R alguspunkti 1 , s.o.
P= või P= ![]()
Ühendame jõufunktsiooni U potentsiaalse energiaga. Meil on
Potentsiaalse energia arvutamise näited
1. Ühtlane gravitatsiooniväli. Las olla m on punkti mass; g - gravitatsiooni kiirendus. Seejärel (joonis 5.2)
2. Elastse vedru jõuväli. Laske materiaalsel punktil liikuda mööda telge Oh(joonis 5.3) vedru toimel, mille külge see on kinnitatud. Kui juures , vedru ei deformeeru, siis valemis (5.5) oletades saame
![]() .
.
5. 3. Kineetiline energia
5. 3. 1. Süsteemi kineetiline energia. Königi teoreem
Materiaalse punkti kineetiliseks energiaks nimetatakse pooleks punkti massi ja selle kiiruse ruudu korrutist, s.o.
.
Kineetiline energia on positiivne skalaarsuurus. SI-süsteemis on kineetilise energia ühikuks džaul: ![]() .
.
Mehaanilise süsteemi kineetiline energia on kõigi süsteemi kuuluvate punktide kineetiliste energiate summa:
 (5.11)
(5.11)
Süsteemi (5.1) punktide kiirused määratakse kindlaks fikseeritud tugisüsteemi suhtes.

Kombineerime koordinaatide alguspunkti süsteemi massikeskmega. Oletame, et mehaaniline süsteem koos koordinaatsüsteemiga liigub translatsiooniliselt fikseeritud koordinaatsüsteemi suhtes (joonis 5.7). Punkt – süsteemi punkt.
Seejärel kiiruse liitmise teoreemi põhjal punkti absoluutkiirus Rk. süsteem kirjutatakse translatsiooni- ja suhteliste kiiruste vektorsummana:
![]() , (aga)
, (aga)
kus on liikuva koordinaatsüsteemi alguspunkti kiirus ( kaasaskantav kiirus, st. süsteemi massikeskme kiirus); - punkti kiirus Rk liikuva koordinaatsüsteemi suhtes Ohuz (suhteline kiirus).
Asendades (a) valemiga (5.11), saame
 (5.12)
(5.12)
Siin on kogu süsteemi mass.
Süsteemi massikeskme raadiusvektor liikuvas koordinaatsüsteemis määratakse vastavalt punktile (2.1), -  , kus
, kus  , st.
, st. ![]() . Sest päritolu KOHTA on süsteemi massikese, siis , siis , s.o. teine summa avaldises (5.12) on võrdne nulliga.
. Sest päritolu KOHTA on süsteemi massikese, siis , siis , s.o. teine summa avaldises (5.12) on võrdne nulliga.
Seega on süsteemi (5.12) kineetilisel energial vorm
 (5.13)
(5.13)
See võrdsus määrab Koenigi teoreem.
Teoreem. Süsteemi kineetiline energia on võrdne süsteemi massikeskmes asuva ainelise punkti kineetilise energia summaga, mille mass on võrdne süsteemi massiga, ja süsteemi liikumise kineetilise energia summaga süsteemi massi keskpunktis. massikese oleks.
5. 3. 2. Tahke keha kineetiline energia
Tahke keha on mehaanilise süsteemi erijuhtum ja seda käsitletakse pidevalt jaotatud massina, siis kõik süsteemi kineetilise energia avaldises sisalduvad summad lähevad integraalideks. Seega võtab jäiga keha valem (5.11) kuju
![]() . (5.14)
. (5.14)

1. Edasi liikuva jäiga keha kineetiline energia.
Seda tüüpi liikumise korral on kõigi kehapunktide kiirused ühesugused (joon. 5.8). Võttes selle valemis (5.14) integraalimärgist välja, saame
![]() . (5.15)
. (5.15)
Edasi liikuva jäiga keha kineetiline energia võrdub poolega keha massistMkiiruse ruutu.
2. Ümber fikseeritud telje pöörleva jäiga keha kineetiline energia

Kiirusmoodul V mis tahes jäiga keha punkt, mis pöörleb ümber fikseeritud telje, on võrdne , kus on jäiga keha nurkkiiruse moodul, on kaugus punktist pöörlemisteljeni z(joonis 5.9). Asendades valemiga (5.14), saame
siin ![]() on jäiga keha inertsimoment telje suhtes z.
on jäiga keha inertsimoment telje suhtes z.
Ümber fikseeritud telje pöörleva jäiga keha kineetiline energia võrdub poolega keha inertsmomendi pöördetelje suhtes ja keha nurkkiiruse ruudu korrutisest.
3. Jäiga keha kineetiline energia tasapinnalise paralleelse liikumise ajal
Tasapinnalise paralleelse liikumise korral koosneb keha mis tahes punkti kiirus pooluse kiiruse ja punkti kiiruse geomeetrilisest summast pooluse ümber pöörlemisel. Laske kehal tasapinnaliselt liikuda Oxy, siis
|| . Pooluse jaoks valime keha massikese, siis valemis (5.13) on kiiruseks punkti kiirus k keha selle pöörlemise ajal pooluse (massikese) suhtes ja on võrdne ![]() , kus vahemaa k-
oh osuta poolusele. Seejärel kirjutatakse (5.13) ümber
, kus vahemaa k-
oh osuta poolusele. Seejärel kirjutatakse (5.13) ümber

Seda silmas pidades ![]() on keha inertsimoment telje suhtes z pooluse läbimine FROM, saab viimase avaldise ümber kirjutada kujul
on keha inertsimoment telje suhtes z pooluse läbimine FROM, saab viimase avaldise ümber kirjutada kujul
![]() , (5.17)
, (5.17)
keha tasapinnalise paralleelse liikumise korral on kineetiline energia translatsioonilise liikumise kineetilise energia summa koos massikeskmega ja ümber massikeskpunkti läbiva ja keha tasapinnaga risti oleva telje pöörlemisest tekkiva kineetilise energia summa. liikumine.
5. 4. Kineetilise energia muutumise teoreem
5. 4. 1. Punkti kineetilise energia muutumise teoreem

Leia seos töö ja kiiruse muutumise vahel. Laske materjalil osutada massile m liigub mööda telge Oh jõu mõjul, näiteks kokkusurutud või kokkusurumata vedru, mis on fikseeritud alguspunktis, - punkt KOHTA(joonis 5.10). Punkti liikumisvõrrandil on vorm
Korrutage selle võrrandi mõlemad pooled , ja, arvestades seda  , saame
, saame
 . (5.19)
. (5.19)
Selle võrdsuse paremal küljel asendame Vx poolt ja korrutada dt parem ja vasak osa. Siis
 . (5.20)
. (5.20)
Sellisel kujul on võrdusel väga selge tähendus: kui punkt on nihutatud dx, jõud teeb tööd , mille tulemusena väärtus muutub punkti kineetiline energia iseloomustavad punkti liikumist ja eelkõige selle kiiruse moodulit. Kui punkt nihutatakse asukohast aastal ja selle kiirus muutub positsioonilt , siis integreerimisel (5.20) on meil
 . (5.21)
. (5.21)
Arvestades seda  , leiame lõpuks
, leiame lõpuks
 . (5.22)
. (5.22)
Materiaalse punkti kineetilise energia muutus selle mis tahes nihke ajal on võrdne punktile samal nihkel mõjuva jõu tööga.
Kõiki eelnevaid protseduure tehes saame
 ,
,
siin on kaar, mida mööda punkt liigub (joonis 5.11).
5. 4. 2. Teoreem süsteemi kineetilise energia muutumisest
Laske süsteemi massipunktidel liikuda nii, et nende raadiusvektorid inertsiaalses tugisüsteemis on saanud juurdekasvu. Uurime, kuidas on antud juhul kineetiline energia muutunud T süsteemid.
Vastavalt (5.11) süsteemi kineetiline energia
 .
.
Arvutame välja süsteemi kineetilise energia diferentsiaali ja teisendame saadud avaldise

siin 
Võttes arvesse seda ![]() , kus on punkti a kiirendus ja punktile rakendatud välis- ja sisejõudude resultandid, kirjutame viimase võrrandi ümber kujul
, kus on punkti a kiirendus ja punktile rakendatud välis- ja sisejõudude resultandid, kirjutame viimase võrrandi ümber kujul
Sellel viisil,
![]() . (5.23)
. (5.23)
Viimane võrdsus väljendab teoreemi mehaanilise süsteemi kineetilise energia muutumise kohta diferentsiaalkujul: süsteemi kineetilise energia diferentsiaal on võrdne süsteemi kõigi jõudude elementaartööga.
erijuhtum. Absoluutselt jäiga keha korral on süsteemi kõigi sisejõudude töö summa null:
![]() .
.
Järelikult võib jäiga keha kineetilise energia muutumise teoreemi (5.23) kirjutada järgmiselt.
Jäiga keha kineetilise energia muutus mistahes elementaarnihkega on võrdne kehale mõjuvate välisjõudude elementaartööga.
Kui (5.24) mõlemad osad on integreeritud kahe positsiooni - alg- ja lõpppositsiooni - vahele, milles vastavalt kineetiline energia ja , saame
![]() . (5.25)
. (5.25)
Näide 1. Ketta mass m= 5 kg ja raadiust juhib punktis rakendatav konstantne jõud AGA(joonis 5.6). Ketas veereb krobelisel pinnal libisemata paremale. Määrake massikeskme kiirus FROM mähis hetkel , kui see liigub vahemaa , libisemishõõrdetegur , , ketta pöörlemisraadius
Lahendus. Plaat liigub tasapinnaliselt. Paneme kirja jäiga keha kineetilise energia muutumise teoreemi
Arvutame välja ketta kineetilise energia. Algsel ajahetkel oli ketas puhkeasendis, st. . Kineetiline energia ketta lõppasendis
- Kokkupuutel 0
- Google+ 0
- Okei 0
- Facebook 0