Låt oss ha ett system materiella poäng, med förbehåll för s begränsningar, vars ekvationer har den ovan angivna formen.
Om systemet vore fritt skulle alla kartesiska koordinater för dess punkter vara oberoende. För att indikera systemets position skulle det vara nödvändigt att ställa in alla kartesiska koordinater för dess punkter. I ett icke-fritt mekaniskt system av kartesiska koordinater måste dess punkter uppfylla s begränsningsekvationer, så endast koordinater kommer att vara oberoende bland dem.
Antalet ömsesidigt oberoende skalära kvantiteter som unikt bestämmer positionen mekaniskt system i rymden kallas systemets antal frihetsgrader.
Följaktligen har ett mekaniskt system bestående av N fria materialpunkter frihetsgrader. Ett icke-fritt system av N materialpunkter med s begränsningar av frihetsgrader.
Genom att bestämma positionen för ett icke-fritt system kan vi självständigt specificera endast koordinaterna; de återstående s-koordinaterna bestäms från begränsningsekvationerna. Emellertid kan positionen för ett icke-fritt system specificeras på ett bekvämare sätt - istället för oberoende kartesiska koordinater kan samma antal andra geometriska storheter anges i termer av vilka kartesiska koordinater (både beroende och oberoende) kan vara unikt uttryckt. Vinklar, linjära avstånd, ytor etc. kan väljas som sådana storheter, kallade generaliserade koordinater för systemet. Bekvämligheten ligger i det faktum att de generaliserade koordinaterna kan väljas med hänsyn till de pålagda begränsningarna, dvs. i överensstämmelse med arten av den rörelse som tillåts för systemet av helheten av de påtvingade anslutningarna. I det här fallet beaktas begränsningarna automatiskt, och det finns inget behov av att lösa begränsningsekvationerna med avseende på beroende koordinater.
Exempel 1. Positionen för en fysisk pendel, som består av en tung stång O A med gångjärn vid punkten O, bestäms helt genom att ställa in vinkeln (Fig. 78). Om vinkeln är given, kan dess kartesiska koordinater beräknas för vilken punkt som helst av stapeln med ett givet avstånd:
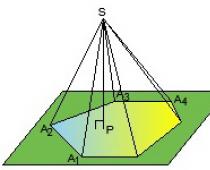
Exempel 2. För ett mekaniskt system som består av en matematisk pendel på en rörlig plattform (fig. 79), bestäms positionen i rymden helt av de angivna storheterna s och ().


Plattformens position bestäms av avståndet s, koordinaterna för punktmassan M beräknas också lätt:
Storheterna (exempel 1) och s (exempel 2) är de generaliserade koordinaterna för de angivna systemen. Detta koncept kan utvidgas till fallet med ett godtyckligt mekaniskt system.
Således är de generaliserade koordinaterna för ett mekaniskt system alla ömsesidigt oberoende geometriska storheter som unikt bestämmer systemets position i rymden. Antalet generaliserade koordinater är lika med antalet frihetsgrader i systemet.
Oavsett geometrisk känsla och, följaktligen, dimensioner, generaliserade koordinater betecknas på ett enhetligt sätt, med bokstaven q med ett nummer: . Av det faktum att de generaliserade koordinaterna unikt bestämmer det mekaniska systemets position i det valda koordinatsystemet Oxyz, följer att det finns funktioner

uttrycka de kartesiska koordinaterna för alla punkter i systemet i termer av generaliserade koordinater och, kanske, tid t. Den specifika formen för dessa funktioner ställs in för varje system (se exempel 1 och 2).
Om du anger radievektorerna för punkter () kan dessa funktioner representeras i vektorform
Låt oss nu introducera begreppet en generaliserad kraft. Vi fixar systemet vid en godtycklig tidpunkt t och berättar den möjliga förskjutningen från denna position.
Låt de generaliserade koordinaterna få inkrement (variationer) som ett resultat. Vi hittar motsvarande elementära förskjutningar av systemets punkter genom att beräkna differentialerna för funktioner vid en fast () tidpunkt:
När vi beräknar det möjliga arbetet för de applicerade krafterna finner vi:

Det kan ses att det möjliga arbetet uttrycks av en homogen funktion av första graden (linjär form) med avseende på variationer av generaliserade koordinater med koefficienter
dvs. har formen
Koefficienterna kallas generaliserade krafter.
Således motsvarar varje generaliserad koordinat sin egen generaliserade kraft. I detta fall är den generaliserade kraft som motsvarar den generaliserade koordinaten variationskoefficienten för denna generaliserade koordinat i uttrycket för det möjliga kraftarbetet som appliceras på systemets punkter.
Generaliserade krafter kan införas för enskilda grupper av krafter, till exempel för aktiva krafter, för bindningsreaktioner, för potentiella krafter, etc. Då kommer den totala generaliserade kraften att uttryckas som summan av de generaliserade krafter som motsvarar dessa distingerade grupper. Så om aktiva krafter uppdelat i aktiva krafter och reaktioner av bindningar, då blir de totala generaliserade krafterna lika med
var är de generaliserade aktiva krafterna, är de generaliserade reaktionerna av bindningarna.
De generaliserade reaktionerna av ideala bindningar är alltid lika med noll. Av denna anledning kan reaktionerna av ideala bindningar ignoreras vid beräkning av de generaliserade krafterna.
Exempel 3. Beräkna den generaliserade kraften hos en fysisk pendel bestående av en stång OA med längd och massa (fig. 80).

Beslut. fysisk pendelär ett system med en frihetsgrad. Följaktligen bestäms pendelns position av en generaliserad koordinat, för vilken vi väljer lutningsvinkeln mot vertikalen .
Vi avbildar pendeln i en godtycklig position, vi applicerar de verkande krafterna. Reaktioner i stöd A kan utelämnas, eftersom gångjärnet är en idealisk anslutning och dess bidrag till den generaliserade kraften är noll. Vi informerar systemet om en möjlig rörelse - en elementär rotation av pendeln med en vinkel i riktning mot ökande vinkel. Endast pendelns vikt fungerar. Dess appliceringspunkt (stavens tyngdpunkt C) kommer att beskriva en längdbåge, medan den kommer att stiga längs vertikalen med en mängd, efter att ha utfört elementärt arbete
Tänk på ett mekaniskt system med idealiska begränsningar. Låt vara de aktiva krafterna i systemet. Låt oss ge det mekaniska systemet en virtuell förskjutning och beräkna det elementära arbetet för systemets krafter på denna förskjutning:
 .
.
Med hjälp av jämlikhet (17.2) uttrycker vi variationen  radie vektor
radie vektor  poäng M k genom variationer
poäng M k genom variationer  generaliserade koordinater:
generaliserade koordinater:
därav,
 . (17.6)
. (17.6)
Låt oss ändra ordningen för summering i likhet (17.6):
 . (17.7)
. (17.7)
Beteckna i uttryck (17.7)
 . (17.8)
. (17.8)
 .
.
Generaliserade krafter F j kalla koefficienterna för variationer av generaliserade koordinater i uttrycket av systemets krafters elementära arbete.
Beroende på dimensionen av variationer av generaliserade koordinater  generaliserade krafter F j kan ha dimensionerna kraft, moment etc.
generaliserade krafter F j kan ha dimensionerna kraft, moment etc.
Sätt att beräkna generaliserade krafter
Låt oss överväga tre sätt att beräkna generaliserade krafter.
1. Bestämning av generaliserade krafter med huvudformeln(17.8)
 . (17.9)
. (17.9)
Formel (17.9) används sällan i praktiken. När man löser problem används den andra metoden oftare.
2. En metod för att "frysa" generaliserade koordinater.
Låt oss ge det mekaniska systemet en sådan virtuell förskjutning, där alla variationer av de generaliserade koordinaterna utom  är lika med noll:
är lika med noll:
Beräkna arbetet för denna rörelse  alla aktiva krafter som appliceras på systemet
alla aktiva krafter som appliceras på systemet
 .
.
Per definition multiplikatorn i variation  är lika med den första generaliserade kraften F 1 .
är lika med den första generaliserade kraften F 1 .
och definiera den andra generaliserade kraften F 2 genom att beräkna virtuellt arbete alla krafter i systemet
 .
.
På samma sätt beräknar vi alla andra generaliserade krafter i systemet.
3. Fallet med ett potentiellt kraftfält.
Anta att vi vet potentiell energi mekaniskt system
Sedan  och enligt formel (32.8)
och enligt formel (32.8)
Principen för virtuella förskjutningar av statik i generaliserade koordinater
Enligt principen om virtuella förskjutningar av statik, för jämvikten i ett system med idealiska holonomiska, stationära begränsningar, är det nödvändigt och tillräckligt att ha tillståndet
 vid noll initialhastigheter.
vid noll initialhastigheter.
Om vi övergår till generaliserade koordinater får vi
 . (17.11)
. (17.11)
Eftersom variationerna av de generaliserade koordinaterna är oberoende, är likheten med noll för uttrycket (17.11) möjlig endast om alla koefficienterna för variationerna av de generaliserade koordinaterna är lika med noll:
Således, för att ett mekaniskt system med idealiska, holonomiska, stationära och begränsande begränsningar ska vara i jämvikt, är det nödvändigt och tillräckligt att alla generaliserade krafter i systemet är lika med noll (vid noll initialhastigheter i systemet).
Lagrangekvationer i generaliserade koordinater (Lagrangekvationer av andra slaget)
Lagranges ekvationer härleds från den allmänna ekvationen för dynamik genom att ersätta virtuella förskjutningar med deras uttryck i termer av variationer av generaliserade koordinater. De är ett system differentialekvationer rörelse av ett mekaniskt system i generaliserade koordinater:
 . (17.13)
. (17.13)
var  - generaliserade hastigheter,
- generaliserade hastigheter,
T rörelseenergi system representerat som en funktion av generaliserade koordinater och generaliserade hastigheter
F j- generaliserade krafter.
Antalet ekvationer i systemet (17.13) bestäms av antalet frihetsgrader och beror inte på antalet kroppar som ingår i systemet. Med idealiska kopplingar kommer endast aktiva krafter in i de rätta delarna av ekvationerna. Om bindningarna inte är idealiska, bör deras reaktioner tillskrivas aktiva krafter.
I fallet med potentiella krafter som verkar på ett mekaniskt system har ekvationerna (17.13) formen
 .
.
Om vi introducerar Lagrange-funktionen L = T P, med hänsyn till att den potentiella energin inte beror på de generaliserade hastigheterna, får vi Lagrangekvationerna av det andra slaget för fallet med potentiella krafter i följande form
 .
.
När du kompilerar Lagrange-ekvationerna av det andra slaget måste du göra följande:
Ställ in antalet frihetsgrader för det mekaniska systemet och välj dess generaliserade koordinater.
Komponera ett uttryck för systemets kinetiska energi och presentera det som en funktion av generaliserade koordinater och generaliserade hastigheter.
Använda ovanstående metoder för att hitta de generaliserade aktiva krafterna i systemet.
Utför alla nödvändiga differentieringsoperationer i Lagrange-ekvationerna.
Exempel.
var J z kroppens tröghetsmoment kring rotationsaxeln z,
 är kroppens vinkelhastighet.
är kroppens vinkelhastighet.
3. Låt oss definiera den generaliserade kraften. Låt oss ge kroppen en virtuell förskjutning och beräkna det virtuella arbetet för alla aktiva krafter i systemet:
Därav, F = M z- huvudmomentet för systemets aktiva krafter i förhållande till kroppens rotationsaxel.
4. Utför differentieringsoperationer i Lagrange-ekvationen
 :
(17.14)
:
(17.14)
 .
(17.15)
.
(17.15)
Ersätter likheter (17.15) med ekvation (173
14) vi får differentialekvationen för kroppens rotationsrörelse
 .
.
Låt oss skriva ner summan av det elementära arbetet för de krafter som verkar på systemets punkter på systemets möjliga förskjutning:
Låt det holonomiska systemet ha  frihetsgrader och följaktligen dess position i rymden bestäms av
frihetsgrader och följaktligen dess position i rymden bestäms av  generaliserade koordinater
generaliserade koordinater  .
.
Ersätter (225) i (226) och ändrar summeringsordningen över index  och
och  , vi får
, vi får
 . (226")
. (226")
var är det skalära värdet

kallad av den generaliserade kraften relaterad till den generaliserade koordinaten
 . Genom att använda det välkända uttrycket för den skalära produkten av två vektorer, kan den tilldelade kraften också representeras som
. Genom att använda det välkända uttrycket för den skalära produkten av två vektorer, kan den tilldelade kraften också representeras som
 – kraftprojektioner på koordinataxlarna;
– kraftprojektioner på koordinataxlarna;  är koordinaterna för kraftanbringningspunkten.
är koordinaterna för kraftanbringningspunkten.
Dimensionen av den generaliserade kraften i enlighet med (226") beror på dimensionen enligt följande  , sammanfaller med dimensionen
, sammanfaller med dimensionen  :
:
 , (228)
, (228)
d.v.s. dimensionen av den generaliserade kraften är lika med dimensionen av kraftens arbete (energin) eller kraftmomentet dividerat med dimensionen av den generaliserade koordinaten till vilken den generaliserade kraften är tilldelad. Av detta följer att den generaliserade kraften kan ha dimensionen kraft eller kraftmoment.
Generaliserad kraftberäkning
1. Den generaliserade kraften kan beräknas med formel (227), som bestämmer den, d.v.s.
2. De generaliserade krafterna kan beräknas som koefficienter för motsvarande variationer av de generaliserade koordinaterna i uttrycket för elementärt arbete (226"), d.v.s.
3. Det lämpligaste sättet att beräkna de generaliserade krafterna, som erhålls från (226 ""), om systemet informeras om en sådan möjlig förskjutning, i vilken endast en generaliserad koordinat ändras, medan de andra inte ändras. Så om  , och resten
, och resten  , sedan från (179") vi har
, sedan från (179") vi har
 .
.
Index  indikerar att summan av elementära verk beräknas på en möjlig förskjutning, där endast koordinaten ändras (varierar)
indikerar att summan av elementära verk beräknas på en möjlig förskjutning, där endast koordinaten ändras (varierar)  . Om variabelkoordinaten är
. Om variabelkoordinaten är  , då
, då
 . (227")
. (227")
Jämviktsvillkor för ett kraftsystem i termer av generaliserade krafter
Systemjämviktsförhållanden härledd från principen om möjliga förskjutningar. De gäller för system för vilka denna princip gäller: för jämvikten i ett mekaniskt system som är föremål för holonomiska, stationära, ideala och icke-befriande begränsningar, i det ögonblick då hastigheterna för alla punkter i systemet är lika med noll, är det nödvändigt och tillräckligt att alla generaliserade krafter är lika med noll
 . (228")
. (228")
3.6.7. Generell dynamikekvation
Generell ekvation av dynamik för ett system med alla begränsningar (kombinerad d'Alembert-Lagrange-princip eller allmän mekaniks ekvation):
 , (229)
, (229)
var  är den aktiva kraft som appliceras på
är den aktiva kraft som appliceras på  -:e punkten i systemet;
-:e punkten i systemet;  är styrkan hos bindningsreaktionen;
är styrkan hos bindningsreaktionen;  - punkttröghetskraft;
- punkttröghetskraft;  - möjlig rörelse.
- möjlig rörelse.
I fallet med systemets jämvikt, när alla tröghetskrafter för systemets punkter går till noll, övergår det till principen om möjliga förskjutningar. Det används vanligtvis för system med idealiska begränsningar för vilka villkoret

I det här fallet tar (229) en av formerna:
 ,
,
 ,
,
 . (230)
. (230)
Således, enligt den allmänna ekvationen för dynamik, vid varje rörelseögonblick för ett system med idealiska begränsningar, är summan av de elementära verken för alla aktiva krafter och tröghetskrafter i systemets punkter lika med noll vid varje möjlig förskjutning av systemet tillåts av begränsningarna.
Den allmänna ekvationen för dynamik kan ges andra likvärdiga former. Expandera den skalära produkten av vektorer, kan den uttryckas som
var  - koordinater
- koordinater  -:e punkten i systemet. Med hänsyn till att projektionerna av tröghetskrafter på koordinataxlarna genom projektionerna av accelerationer på dessa axlar uttrycks av relationerna
-:e punkten i systemet. Med hänsyn till att projektionerna av tröghetskrafter på koordinataxlarna genom projektionerna av accelerationer på dessa axlar uttrycks av relationerna
 ,
,
den allmänna ekvationen för dynamik kan ges formen
I denna form kallas det den allmänna ekvationen för dynamik i analytisk form.
När man använder den allmänna ekvationen för dynamik är det nödvändigt att kunna beräkna det elementära arbetet för systemets tröghetskrafter på möjliga förskjutningar. För detta används motsvarande formler för elementärt arbete som erhållits för vanliga krafter. Låt oss överväga deras tillämpning på tröghetskrafterna hos en stel kropp i särskilda fall av dess rörelse.
På framåtrörelse. I det här fallet har kroppen tre frihetsgrader och kan, på grund av de pålagda begränsningarna, endast utföra translationell rörelse. Eventuella rörelser av kroppen, som tillåter anslutningar, är också translationella.
Tröghetskrafterna i translationell rörelse reduceras till resultanten  . För summan av elementärt arbete av tröghetskrafter på den translationella möjliga förskjutningen av kroppen får vi
. För summan av elementärt arbete av tröghetskrafter på den translationella möjliga förskjutningen av kroppen får vi
var  - den möjliga förskjutningen av massacentrum och vilken punkt som helst på kroppen, eftersom den translationella möjliga förskjutningen för alla punkter i kroppen är densamma: accelerationerna är desamma, dvs.
- den möjliga förskjutningen av massacentrum och vilken punkt som helst på kroppen, eftersom den translationella möjliga förskjutningen för alla punkter i kroppen är densamma: accelerationerna är desamma, dvs.  .
.
När en stel kropp roterar runt en fast axel.
Kroppen har i detta fall en grad av frihet. Den kan rotera runt en fast axel  . Möjlig förskjutning, som tillåts av överlagrade begränsningar, är också en rotation av kroppen genom en elementär vinkel
. Möjlig förskjutning, som tillåts av överlagrade begränsningar, är också en rotation av kroppen genom en elementär vinkel  runt en fast axel.
runt en fast axel.
Tröghetskrafter reducerade till en punkt  på rotationsaxeln, reduceras till huvudvektorn
på rotationsaxeln, reduceras till huvudvektorn  och huvudpoängen
och huvudpoängen  .
Huvudvektor tröghetskrafter appliceras på en fast punkt, och dess elementära arbete på en möjlig förskjutning är noll. För huvudmomentet av tröghetskrafter kommer elementärt arbete som inte är lika med noll att utföras endast genom dess projektion på rotationsaxeln
.
Huvudvektor tröghetskrafter appliceras på en fast punkt, och dess elementära arbete på en möjlig förskjutning är noll. För huvudmomentet av tröghetskrafter kommer elementärt arbete som inte är lika med noll att utföras endast genom dess projektion på rotationsaxeln  . Sålunda, för summan av tröghetskrafternas arbete på den antagna möjliga förskjutningen, har vi
. Sålunda, för summan av tröghetskrafternas arbete på den antagna möjliga förskjutningen, har vi
 ,
,
om vinkeln  rapportera i riktningen för bågpilen för vinkelaccelerationen
rapportera i riktningen för bågpilen för vinkelaccelerationen  .
.
i platt rörelse.
Länkar placerade på fast, tillåt i detta fall endast en möjlig planförskjutning. I det allmänna fallet består det av en translationell möjlig förskjutning tillsammans med polen, för vilken vi väljer masscentrum, och rotation med en elementär vinkel  runt axeln
runt axeln  passerar genom masscentrum och vinkelrätt mot planet, parallellt med vilket kroppen kan göra en planrörelse.
passerar genom masscentrum och vinkelrätt mot planet, parallellt med vilket kroppen kan göra en planrörelse.
Eftersom tröghetskrafterna i en plan rörelse hos en stel kropp kan reduceras till huvudvektorn  och huvudpoängen
och huvudpoängen  (om masscentrum väljs som referenscentrum), så kommer summan av tröghetskrafternas elementära arbete på en eventuell planförskjutning att reduceras till tröghetskraftsvektorns elementära arbete
(om masscentrum väljs som referenscentrum), så kommer summan av tröghetskrafternas elementära arbete på en eventuell planförskjutning att reduceras till tröghetskraftsvektorns elementära arbete  om den möjliga förskjutningen av masscentrum och det elementära arbetet av huvudtröghetsmomentet krafter på den elementära rotationsrörelsen runt axeln
om den möjliga förskjutningen av masscentrum och det elementära arbetet av huvudtröghetsmomentet krafter på den elementära rotationsrörelsen runt axeln  passerar genom massans centrum. I detta fall kan elementärt arbete som inte är lika med noll utföras endast genom projektionen av huvudtröghetsmomentet på axeln
passerar genom massans centrum. I detta fall kan elementärt arbete som inte är lika med noll utföras endast genom projektionen av huvudtröghetsmomentet på axeln  , dvs.
, dvs.  . Sålunda har vi i det aktuella fallet
. Sålunda har vi i det aktuella fallet
om rotation med en elementär vinkel  direkt i en båge till
direkt i en båge till  .
.
Naturligtvis, när man beräknar denna generaliserade kraft, bör den potentiella energin definieras som en funktion av de generaliserade koordinaterna
P = P( q 1 , q 2 , q 3 ,…,qs).
Anmärkningar.
Först. Vid beräkning av de generaliserade reaktionskrafterna beaktas inte ideala bindningar.
Andra. Dimensionen av den generaliserade kraften beror på dimensionen av den generaliserade koordinaten. Så om dimensionen [ q] är en meter, sedan dimensionen
[Q]= Nm/m = Newton om [ q] är en radian, då [Q] = Nm; om [ q] = m 2, sedan [Q]=H/m, etc.
Exempel 4 En ring glider längs en stång som svänger i ett vertikalplan M vägning R(Fig. 10). Spöet antas vara viktlöst. Låt oss definiera de generaliserade krafterna.
Fig. 10
Beslut. Systemet har två frihetsgrader. Tilldela två generaliserade koordinater s och .
Låt oss hitta den generaliserade kraft som motsvarar koordinaten s. Vi ger en ökning till denna koordinat, lämnar koordinaten oförändrad och beräknar arbetet för den enda aktiva kraften R, får vi den generaliserade kraften
![]()
Sedan ökar vi koordinaten , förutsatt s= konst. När stången roteras genom en vinkel, punkten för applicering av kraft R, ringlet M, kommer att flytta till . Den generaliserade kraften kommer att visa sig
Eftersom systemet är konservativt kan generaliserade krafter också hittas med hjälp av potentiell energi. Skaffa sig ![]() och
och ![]() . Det visar sig mycket lättare.
. Det visar sig mycket lättare.
Lagrangejämviktsekvationer
Per definition (7), de generaliserade krafterna ![]() , k = 1,2,3,…,s, var sär antalet frihetsgrader.
, k = 1,2,3,…,s, var sär antalet frihetsgrader.
Om systemet är i jämvikt, så enligt principen om möjliga förskjutningar (1) ![]() . Här är de förskjutningar som tillåts av obligationerna, de möjliga förskjutningarna. Därför, när ett materialsystem är i jämvikt, är alla dess generaliserade krafter lika med noll:
. Här är de förskjutningar som tillåts av obligationerna, de möjliga förskjutningarna. Därför, när ett materialsystem är i jämvikt, är alla dess generaliserade krafter lika med noll:
Q k= 0, (k=1,2,3,…, s). (10)
Dessa ekvationer jämviktsekvationer i generaliserade koordinater eller Lagrangejämviktsekvationer , tillåta att lösa problem med statik med en annan metod.
Om systemet är konservativt, då . Alltså i en jämviktsposition. Det vill säga, i ett sådant materialsystems jämviktsposition är dess potentiella energi antingen maximal eller minimum, dvs. funktionen П(q) har ett extremum.
Detta är uppenbart från analysen av det enklaste exemplet (fig. 11). Potentiell energi för bollen i position M 1 har ett minimum i position M 2 är max. Det kan ses i positionen M 1 balansen kommer att vara stabil; gravid M 2 - instabil.

Fig. 11
Jämvikten anses vara stabil om kroppen i denna position ges en låg hastighet eller förskjuts med ett litet avstånd och dessa avvikelser inte ökar i framtiden.
Det kan bevisas (Larange-Dirichlet-satsen) att om i jämviktspositionen för ett konservativt system dess potentiella energi har ett minimum, så är denna jämviktsposition stabil.
För ett konservativt system med en frihetsgrad, bestäms villkoret för den minimala potentiella energin, och därmed stabiliteten hos jämviktspositionen, av andraderivatan, av dess värde i jämviktspositionen,
Exempel 5 Kärna OA vägning R kan rotera i ett vertikalt plan runt en axel O(Fig. 12). Låt oss hitta och studera stabiliteten i jämviktspositionerna.

Fig. 12
Beslut. Spön har en frihetsgrad. Den generaliserade koordinaten är vinkeln.
I förhållande till den lägre nollpositionen, den potentiella energin П= Ph eller
I jämviktsläget bör det finnas ![]() . Därför har vi två jämviktspositioner som motsvarar vinklarna och (positioner OA 1 och OA 2). Vi undersöker deras stabilitet. Vi hittar den andra derivatan. Naturligtvis för , . Jämviktsläget är stabilt. vid ,
. Därför har vi två jämviktspositioner som motsvarar vinklarna och (positioner OA 1 och OA 2). Vi undersöker deras stabilitet. Vi hittar den andra derivatan. Naturligtvis för , . Jämviktsläget är stabilt. vid , ![]() . Den andra jämviktspositionen är instabil. Resultaten är tydliga.
. Den andra jämviktspositionen är instabil. Resultaten är tydliga.
Generaliserade tröghetskrafter.
Med samma metod (8), som användes för att beräkna de generaliserade krafterna Q k, motsvarande de aktiva, givna, krafterna, bestäms också de generaliserade krafterna S k, motsvarande tröghetskrafterna för systemets punkter:
Och sedan ![]() sedan
sedan

Några matematiska transformationer.
Självklart,
Eftersom a qk = qk(t), (k = 1,2,3,..., s), så
Så den partiella derivatan av hastigheten med avseende på
![]()
Dessutom kan man under den sista termen av (14) ändra differentieringsordningen:
Genom att ersätta (15) och (16) i (14) och sedan (14) i (13), får vi
Dividera den sista summan med två och med tanke på att summan av derivatorna är lika med derivatan av summan, får vi
där är systemets kinetiska energi, är den generaliserade hastigheten.
Lagranges ekvationer.
Per definition (7) och (12), de generaliserade krafterna
Men baserat på den allmänna dynamikekvationen (3), höger del jämställdheten är noll. Och sedan allt k = 1,2,3,…,s) skiljer sig från noll, då . Genom att ersätta värdet på den generaliserade tröghetskraften (17) får vi ekvationen
Dessa ekvationer kallas differentialekvationer för rörelse i generaliserade koordinater, Lagrangekvationer av det andra slaget eller bara – Lagrange-ekvationerna.
Antalet av dessa ekvationer är lika med antalet frihetsgrader för materialsystemet.
Om systemet är konservativt och rör sig under verkan av krafterna i det potentiella fältet, när de generaliserade krafterna är , kan Lagrangekvationerna skrivas i formen
var L = T– P heter Lagrange funktion (det antas att den potentiella energin П inte beror på de generaliserade hastigheterna).
Ofta, när man studerar materialsystemens rörelse, visar det sig att vissa generaliserade koordinater qj gå inte in explicit i Lagrange-funktionen (eller in T och P). Sådana koordinater kallas cyklisk. Lagrangekvationerna som motsvarar dessa koordinater är enklare.
Den första integralen av sådana ekvationer kan hittas omedelbart. Det kallas den cykliska integralen:
![]()
Ytterligare studier och transformationer av Lagrange-ekvationerna är föremål för ett särskilt avsnitt av teoretisk mekanik - "Analytisk mekanik".
Lagranges ekvationer har ett antal fördelar i jämförelse med andra metoder för att studera systemens rörelse. Huvudfördelarna: tekniken för att sammanställa ekvationer är densamma i alla problem, reaktionerna av ideala bindningar tas inte med i beräkningen när man löser problem.
Och en sak till - dessa ekvationer kan användas för att studera inte bara mekaniska utan också andra fysiska system (elektriska, elektromagnetiska, optiska, etc.).
Exempel 6 Låt oss fortsätta studiet av ringlets rörelse M på en svängspö (exempel 4).
Generaliserade koordinater tilldelas - och s (Fig.13). De generaliserade krafterna definieras: och ![]() .
.

Fig. 13
Beslut. Ringens kinetiska energi Där a och .
![]()
Vi komponerar två Lagrange-ekvationer
![]()
då är ekvationerna:
![]()
![]()
![]()
Vi har erhållit två icke-linjära differentialekvationer av andra ordningen, för lösningen av vilka speciella metoder behövs.
Exempel 7 Låt oss sammanställa differentialekvationen för strålens rörelse AB, som rullar utan att glida på en cylindrisk yta (fig. 14). Strållängd AB = l, vikten - R.
I jämviktsläget var strålen horisontell och tyngdpunkten Med det var på toppen av cylindern. Balken har en frihetsgrad. Dess position bestäms av en generaliserad koordinat - en vinkel (Fig. 76).

Fig. 14
Beslut. Systemet är konservativt. Därför komponerar vi Lagrangekvationen med hjälp av den potentiella energin П=mgh, beräknad i förhållande till den horisontella positionen. Vid kontaktpunkten är det momentana centrum av hastigheter och (lika med längden på cirkelbågen med vinkel ).
Därför (se Fig.76) och .
Kinetisk energi (strålen gör en planparallell rörelse)
Vi hittar de nödvändiga derivatorna för ekvationen och ![]()
Vi gör en ekvation
eller, slutligen,
Frågor för självrannsakan
Vad kallas den möjliga förskjutningen av ett icke-fritt mekaniskt system?
Hur hänger de möjliga och faktiska förskjutningarna av systemet ihop?
Vilka anslutningar kallas: a) stationära; b) idealiskt?
Formulera principen om möjliga förskjutningar. Skriv ner dess formeluttryck.
Är det möjligt att tillämpa principen om virtuella förskjutningar på system med icke-ideala begränsningar?
Vilka är de generaliserade koordinaterna för ett mekaniskt system?
Hur många frihetsgrader har ett mekaniskt system?
I vilket fall beror de kartesiska koordinaterna för systemets punkter inte bara på generaliserade koordinater utan också på tid?
Vilka är de möjliga förskjutningarna av ett mekaniskt system?
Beror de möjliga förskjutningarna på de krafter som verkar på systemet?
Vilka bindningar i ett mekaniskt system kallas ideal?
Varför är en bindning gjord med friktion inte en idealisk bindning?
Hur formuleras principen om eventuella förskjutningar?
Vilka typer av arbetsekvationer finns det?
Varför förenklar principen om möjliga förskjutningar härledningen av villkoren för jämvikten av krafter som appliceras på icke-fria system som består av ett stort antal kroppar?
Hur sammanställs arbetsekvationer för krafter som verkar på ett mekaniskt system med flera frihetsgrader?
Vad är förhållandet mellan drivkraft och motståndets kraft i de enklaste maskinerna?
Hur är det formulerat gyllene regel mekanik?
Hur bestäms bindningsreaktioner med hjälp av principen om möjliga förskjutningar?
Vilken typ av bindningar kallas holonomiska?
Vad kallas antalet frihetsgrader för ett mekaniskt system?
Vad kallas systemets generaliserade koordinater?
Hur många generaliserade koordinater har ett icke-fritt mekaniskt system?
Hur många frihetsgrader har ratten på en bil?
Vad är en generaliserad kraft?
Skriv ner en formel som uttrycker det totala elementära arbetet av alla krafter som appliceras på systemet i generaliserade koordinater.
Hur bestäms dimensionen av den generaliserade kraften?
Hur beräknas generaliserade krafter i konservativa system?
Skriv ner en av formlerna som uttrycker den allmänna ekvationen för dynamiken i ett system med idealiska begränsningar. Vad är den fysiska innebörden av denna ekvation?
Vad kallas den generaliserade kraften av aktiva krafter som appliceras på systemet?
Vad är den generaliserade tröghetskraften?
Formulera d'Alembert-principen i generaliserade krafter.
Vad är den allmänna ekvationen för dynamik?
Vad kallas en generaliserad kraft som motsvarar någon generaliserad koordinat av systemet, och vad är dess dimension?
Vilka är de generaliserade reaktionerna av ideala kopplingar?
Härled den allmänna ekvationen för dynamik i generaliserade krafter.
Vilken form har förutsättningarna för jämvikten mellan krafter som appliceras på ett mekaniskt system, erhållna från den allmänna ekvationen för dynamik i generaliserade krafter?
Vilka formler uttrycker de generaliserade krafterna genom projektioner av krafter på de fasta axlarna för kartesiska koordinater?
Hur bestäms generaliserade krafter i fallet med konservativa och i fallet med icke-konservativa krafter?
Vad är geometriska samband?
Ge en vektornotation av principen för möjliga förskjutningar.
Nämn det nödvändiga och tillräckliga villkoret för jämvikten i ett mekaniskt system med idealiska stationära geometriska begränsningar.
Vilken egenskap har kraftfunktionen hos ett konservativt system i ett jämviktstillstånd?
Skriv ner systemet av Lagrange differentialekvationer av det andra slaget.
Hur många Lagrange-ekvationer av det andra slaget kan skrivas för ett icke-fritt mekaniskt system?
Beror antalet Lagrange-ekvationer i ett mekaniskt system på antalet kroppar som utgör systemet?
Vad kallas systemets kinetiska potential?
För vilka mekaniska system finns Lagrange-funktionen?
Funktionen av vilka argument är hastighetsvektorn för en punkt som tillhör ett mekaniskt system med s grader av frihet?
Vad är den partiella derivatan av hastighetsvektorn för en punkt i systemet med avseende på någon generaliserad hastighet?
Vilka arguments funktion är den kinetiska energin i ett system som är föremål för holonomiska icke-stationära begränsningar?
Vilken form har Lagrangekvationerna av det andra slaget? Vad är antalet av dessa ekvationer för varje mekaniskt system?
Vilken form tar Lagrangekvationerna av det andra slaget i det fall då både konservativa och icke-konservativa krafter verkar på systemet?
Vad är Lagrange-funktionen eller kinetisk potential?
Vilken form har Lagrangekvationerna av det andra slaget för ett konservativt system?
Beroende på vilka variabler ska den kinetiska energin för ett mekaniskt system uttryckas när man sammanställer Lagrangekvationerna?
Hur bestäms den potentiella energin i ett mekaniskt system under inverkan av elastiska krafter?
Uppgifter för självständig lösning
Uppgift 1. Genom att tillämpa principen om möjliga förskjutningar, bestäm reaktionerna för anslutningarna av sammansatta strukturer. Strukturscheman visas i fig. 15, och de data som behövs för lösningen ges i tabell. 1. I figurerna är alla mått i meter.
bord 1
Alternativ 1 Alternativ 2

Alternativ 3 Alternativ 4


Alternativ 5 Alternativ 6

Alternativ 7 Alternativ 8



Fig.16 Fig.17
Beslut. Det är lätt att kontrollera att i detta problem är alla villkor för att tillämpa Lagrange-principen uppfyllda (systemet är i jämvikt, begränsningarna är stationära, holonomiska, hållande och idealiska).
Låt oss bli av med kopplingen som motsvarar reaktionen X A (fig. 17). För att göra detta, vid punkt A, bör det fasta gångjärnet bytas ut, till exempel med ett stångstöd, medan systemet får en frihetsgrad. Som redan nämnts bestäms den möjliga förskjutningen av systemet av de begränsningar som åläggs det och beror inte på de applicerade krafterna. Därför är bestämningen av möjliga förskjutningar ett kinematiskt problem. Eftersom ramen i detta exempel endast kan röra sig i figurens plan, är dess möjliga rörelser också plana. I fallet med plan rörelse kan kroppens rörelse betraktas som en rotation runt det momentana hastighetscentrumet. Om det momentana hastighetscentrumet ligger vid oändligheten, så motsvarar detta fallet med momentana translationsrörelser, när förskjutningarna av alla punkter i kroppen är desamma.
För att hitta det momentana centrum för hastigheter, är det nödvändigt att känna till riktningarna för hastigheterna för två punkter på kroppen. Därför bör bestämningen av möjliga förskjutningar av en sammansatt struktur börja med att hitta de möjliga förskjutningarna av elementet för vilka sådana hastigheter är kända. I det här fallet bör du börja med ramen CDB, sedan dess poäng PÅär fixerad och därför är den möjliga förskjutningen av denna ram dess rotation genom en vinkel runt axeln som passerar genom gångjärnet B. Nu vet du den möjliga förskjutningen av spetsen Med(det tillhör samtidigt systemets båda ramar) och den möjliga förskjutningen av punkten MEN(möjlig rörelse av punkt A är dess rörelse längs axeln X), finner vi det momentana centrum för hastigheter C 1 av ramen AES. Således den möjliga rörelsen av ramen AESär dess rotation runt punkten C 1 med vinkeln . Sambandet mellan vinklarna och bestäms genom förskjutningen av punkt C (se fig. 17)
Från likheten mellan trianglar EC 1 C och BCD har vi
Som ett resultat får vi beroenden:
Enligt principen om möjliga rörelser
Vi beräknar sekventiellt de möjliga jobb som ingår här:
Q=2q - resultant fördelad belastning, vars appliceringspunkt visas i fig. 79; det möjliga arbetet som utförs av den är lika.
1. Den generaliserade kraften kan beräknas med formel (227), som bestämmer den, d.v.s.
2. De generaliserade krafterna kan beräknas som koefficienter för motsvarande variationer av de generaliserade koordinaterna i uttrycket för elementärt arbete (226"), d.v.s.
3. Det lämpligaste sättet att beräkna de generaliserade krafterna, som erhålls från (226 ""), om systemet informeras om en sådan möjlig förskjutning, i vilken endast en generaliserad koordinat ändras, medan de andra inte ändras. Så om och resten ![]() , sedan från (179") vi har
, sedan från (179") vi har
 .
.
Indexet anger att summan av elementärt arbete beräknas på en eventuell förskjutning, där endast koordinaten ändras (varierar). Om variabelkoordinaten är , då
 . (227")
. (227")
Jämviktsvillkor för ett kraftsystem i termer av generaliserade krafter
Systemjämviktsförhållanden härledd från principen om möjliga förskjutningar. De gäller för system för vilka denna princip gäller: för jämvikten i ett mekaniskt system som är föremål för holonomiska, stationära, ideala och icke-befriande begränsningar, i det ögonblick då hastigheterna för alla punkter i systemet är lika med noll, är det nödvändigt och tillräckligt att alla generaliserade krafter är lika med noll
![]() . (228")
. (228")
Generell dynamikekvation
Den allmänna ekvationen för dynamik för ett system med alla begränsningar (förenad d'Alembert-Lagrange-principen eller allmän mekaniks ekvation):
![]() , (229)
, (229)
där är den aktiva kraften som appliceras på den -:te punkten av systemet; är styrkan hos bindningsreaktionen; - punkttröghetskraft; - möjlig rörelse.
I fallet med systemets jämvikt, när alla tröghetskrafter för systemets punkter går till noll, övergår det till principen om möjliga förskjutningar. Det används vanligtvis för system med idealiska begränsningar för vilka villkoret
I det här fallet tar (229) en av formerna:
![]() ,
,
![]() ,
,
![]() . (230)
. (230)
Således, enligt den allmänna ekvationen för dynamik, vid varje rörelseögonblick för ett system med idealiska begränsningar, är summan av de elementära verken för alla aktiva krafter och tröghetskrafter i systemets punkter lika med noll vid varje möjlig förskjutning av systemet tillåts av begränsningarna.
Den allmänna ekvationen för dynamik kan ges andra likvärdiga former. Expandera den skalära produkten av vektorer, kan den uttryckas som
var är koordinaterna för den -te punkten i systemet. Med hänsyn till att projektionerna av tröghetskrafter på koordinataxlarna genom projektionerna av accelerationer på dessa axlar uttrycks av relationerna
![]() ,
,
den allmänna ekvationen för dynamik kan ges formen
I denna form kallas det den allmänna ekvationen för dynamik i analytisk form.
När man använder den allmänna ekvationen för dynamik är det nödvändigt att kunna beräkna det elementära arbetet för systemets tröghetskrafter på möjliga förskjutningar. För detta används motsvarande formler för elementärt arbete som erhållits för vanliga krafter. Låt oss överväga deras tillämpning på tröghetskrafterna hos en stel kropp i särskilda fall av dess rörelse.
Med rörelse framåt. I det här fallet har kroppen tre frihetsgrader och kan, på grund av de pålagda begränsningarna, endast utföra translationell rörelse. Eventuella rörelser av kroppen, som tillåter anslutningar, är också translationella.
Tröghetskrafterna i translationell rörelse reduceras till resultanten ![]() . För summan av elementärt arbete av tröghetskrafter på den translationella möjliga förskjutningen av kroppen får vi
. För summan av elementärt arbete av tröghetskrafter på den translationella möjliga förskjutningen av kroppen får vi
var är den möjliga förskjutningen av massacentrum och någon punkt på kroppen, eftersom den translationella möjliga förskjutningen är densamma för alla punkter i kroppen: accelerationerna är desamma, d.v.s.
När en stel kropp roterar runt en fast axel. Kroppen har i detta fall en grad av frihet. Den kan rotera runt en fast axel. Möjlig förskjutning, som tillåts av överlagrade begränsningar, är också en rotation av kroppen genom en elementär vinkel runt en fast axel.
Tröghetskrafterna, reducerade till en punkt på rotationsaxeln, reduceras till huvudvektorn och huvudmomentet. Huvudvektorn för tröghetskrafter appliceras på en fast punkt, och dess elementära arbete på en möjlig förskjutning är noll. I huvudmomentet av tröghetskrafter kommer elementärt arbete som inte är lika med noll att utföras endast genom dess projektion på rotationsaxeln. Sålunda, för summan av tröghetskrafternas arbete på den antagna möjliga förskjutningen, har vi
![]() ,
,
om vinkeln rapporteras i riktningen för bågpilen för vinkelaccelerationen .
i platt rörelse. De begränsningar som ställs på en stel kropp i detta fall tillåter endast en möjlig planförskjutning. I det allmänna fallet består den av en translationell möjlig rörelse tillsammans med polen, för vilken vi väljer masscentrum, och rotation med en elementär vinkel runt axeln som går genom masscentrum och vinkelrätt mot planet, parallell med vilken kroppen kan utföra en plan rörelse.
- I kontakt med 0
- Google+ 0
- OK 0
- Facebook 0